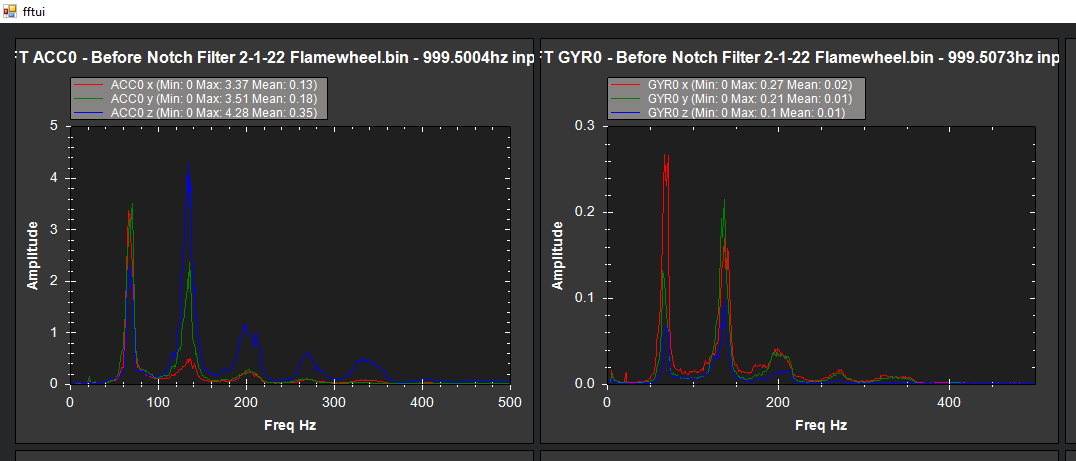
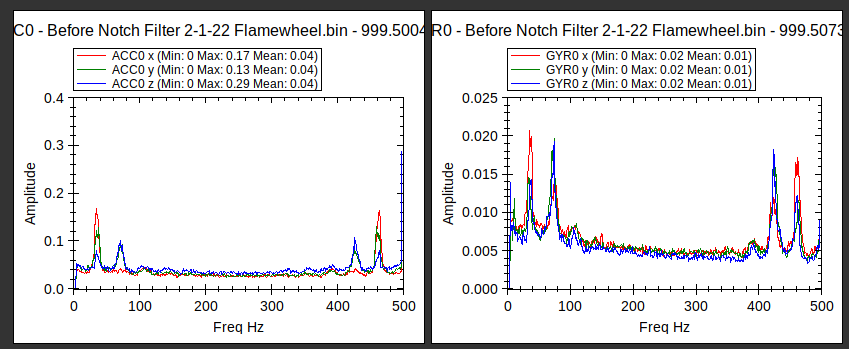
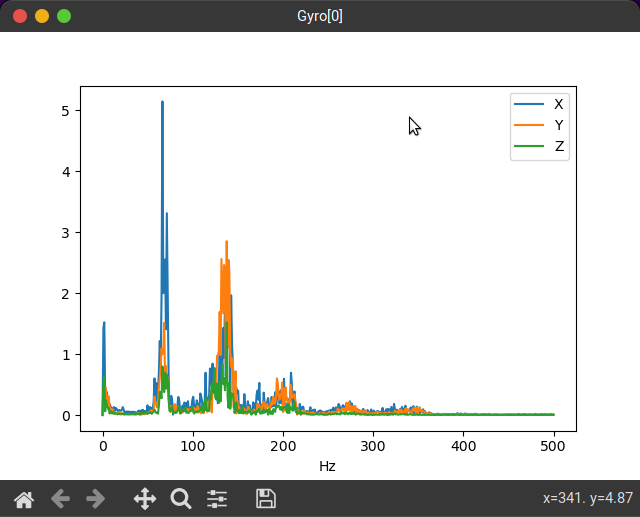
The amplitude on all three are different, and the Hz of the first peak is different (Although Mavproxy and MP on windows are similar enough for setting filters).
Both installations of Mission Planner are 1.3.76 Build 1.3.8063.11439. I’m not sure how to find the version of MavExplorer that was used but I have done the beta update to MavProxy in the last week or so. If it’s important tell me how to find the version number and I’ll gladly get it for you.
Why would the same version MP give such different results?
I am interested in the real reason as well.
I could make some estimated guesses of possible reasons (like the number definitions per platform).
Most of the basic functionality is available on a emulated platform however in case of using the advanced features here and there short comings will be visible.
All I can say after experimenting with different GCS software’s on various platforms (Win, Linux (ARM and x86), Android etc).
Nothing beats a native application.