hello I am trying to make indoor lightshow drone possible using UWB indoor navigation system, I am able to get local position using the UWB module (DM1000 BU-01) of accuracy ~10cm, and i am sending this local position converted to latitude and longitude to arducopter using gps_input message, by making gps_type = 14, and it works and the drone is showing on the map, this is the message that are being send
gpsData.time_usec = time_to_boot;
gpsData.time_week_ms = time_week_ms; /*< [ms] GPS time (from start of GPS week)*/
gpsData.lat = (lat) * 1e7 ; /*< [degE7] Latitude (WGS84)*/
gpsData.lon = (lon) * 1e7; /*< [degE7] Longitude (WGS84)*/
gpsData.alt = 0; /*< [m] Altitude (MSL). Positive for up.*/
gpsData.hdop = 0.1;
gpsData.vdop = 0.1;
gpsData.vn = 0; /*< [m/s] GPS velocity in north direction in earth-fixed NED frame*/
gpsData.ve= 0; /*< [m/s] GPS velocity in east direction in earth-fixed NED frame*/
gpsData.vd = 0; /*< [m/s] GPS velocity in down direction in earth-fixed NED frame*/
gpsData.speed_accuracy = 0.1; /*< [m/s] GPS speed accuracy*/
gpsData.horiz_accuracy = 1; /*< [m] GPS horizontal accuracy*/
gpsData.vert_accuracy = 1; /*< [m] GPS vertical accuracy*/
gpsData.ignore_flags = 249;
gpsData.time_week = time_week; /*< GPS week number*/
gpsData.gps_id = 1; /*< ID of the GPS for multiple GPS inputs*/
gpsData.fix_type = 3; /*< 0-1: no fix, 2: 2D fix, 3: 3D fix. 4: 3D with DGPS. 5: 3D with RTK*/
gpsData.satellites_visible = 25;
gpsData.yaw = 0;
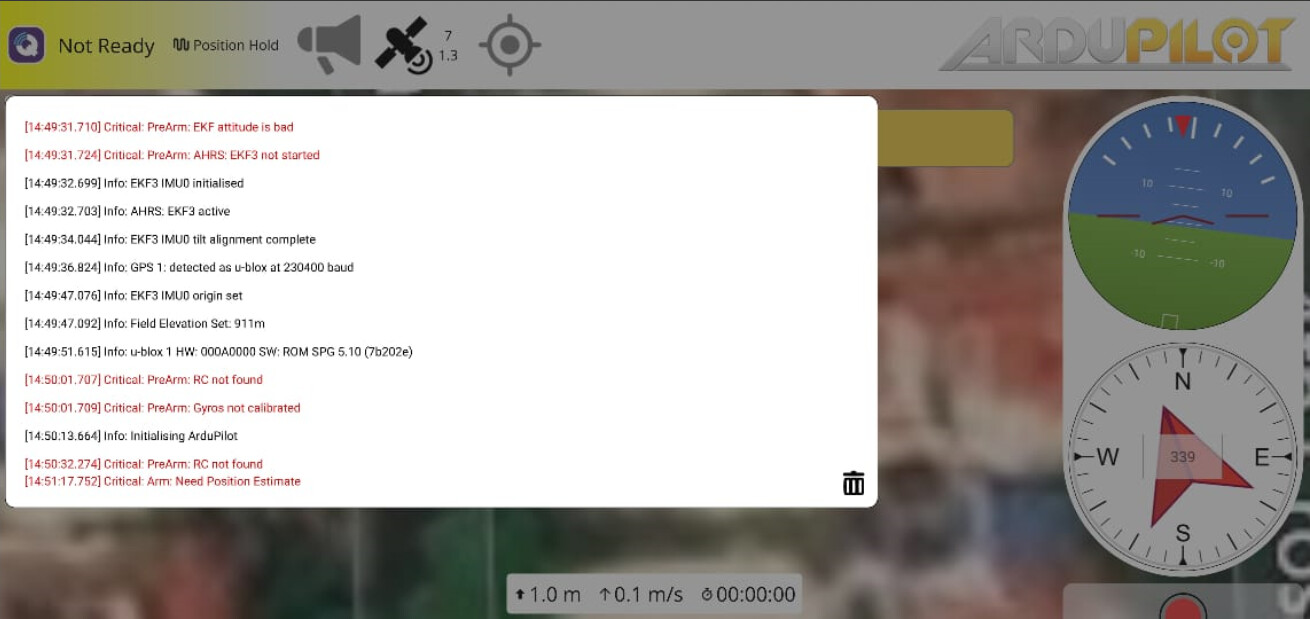
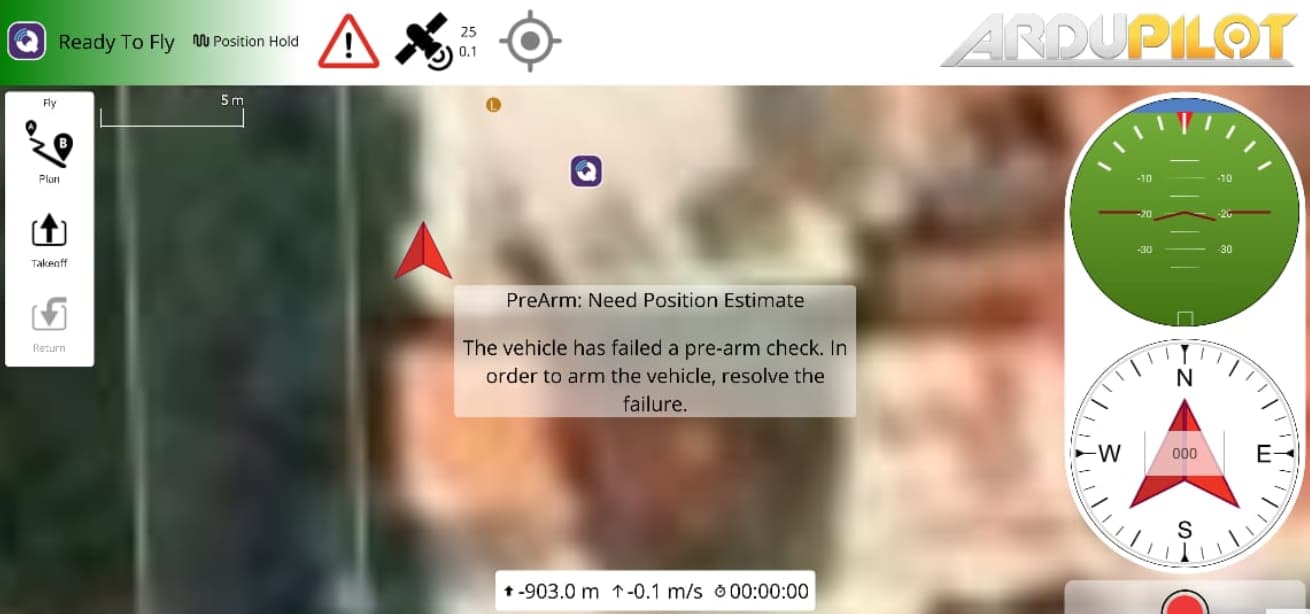
time_week_ms and time_week variables are being populated by external rtc on the positioning module, now i have a problem when i try to arm the drone in poshold it says “need position estimate”, i have tried to set global origin manually, using set_gps_global_origin but still same, i tried to switch between ek3 and ek2, still same.
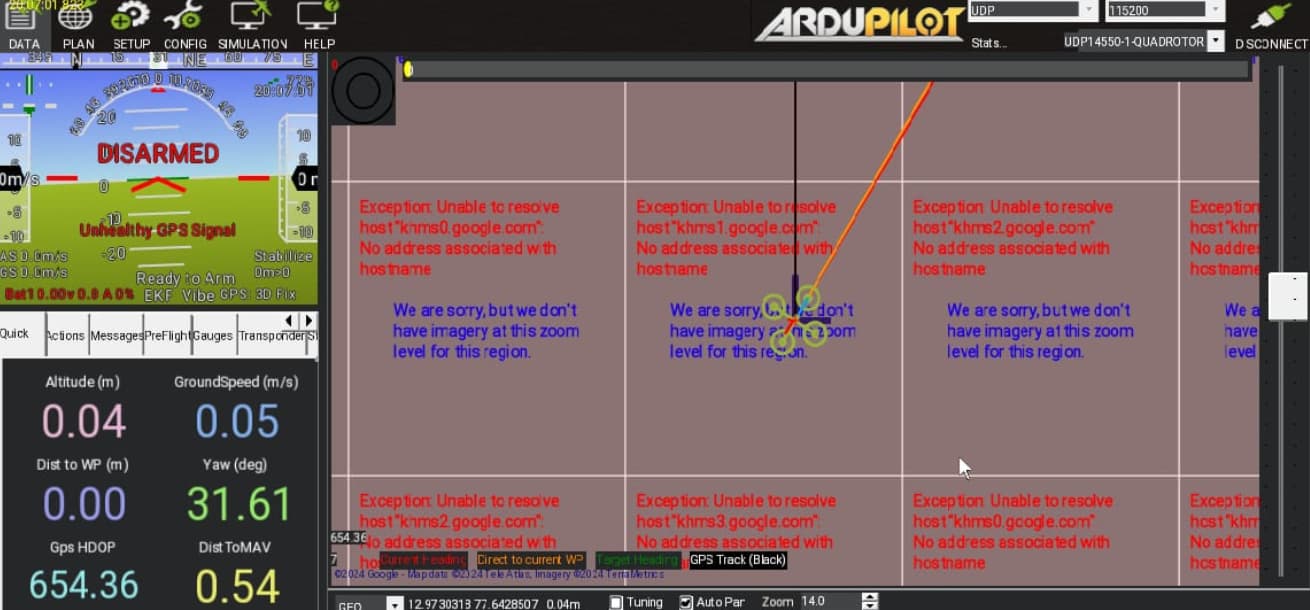
in mission planner it shows unhealthy gps, i try to change hdop from 0.1 to max but still same, i calibrated all sensors too, and working good
here is the log
my end goal is to test this system with opensource lightshow software called skybrush, just to prove it is possible
is there any other better way to inject local pos data to arducopter?