cuav_le,what A kind gesture,i am sure this will go onto help many.
2 Likes
I am discussing via message with CUAV and am very appreciative of the gesture!
4 Likes
Hello everyone,
I received the C-RTK-2HP GPS.
Unfortunately right now I don’t have anything to install it on but to get familiar with it, I will do something that simulates a UAV.

Regards
Raúl.
2 Likes
Looks interesting, what is the price?
Its price depends on the quantity and you can get it from CUAV store.
2 Likes
Thanks, now I can see it. Alibaba try to redirect to the app very fast.
1 Like
Hello,
As I mentioned a few days ago, I now do not have any UAV available to test CUAV’s C-RTK 2HP GPS, so this is what I will use.
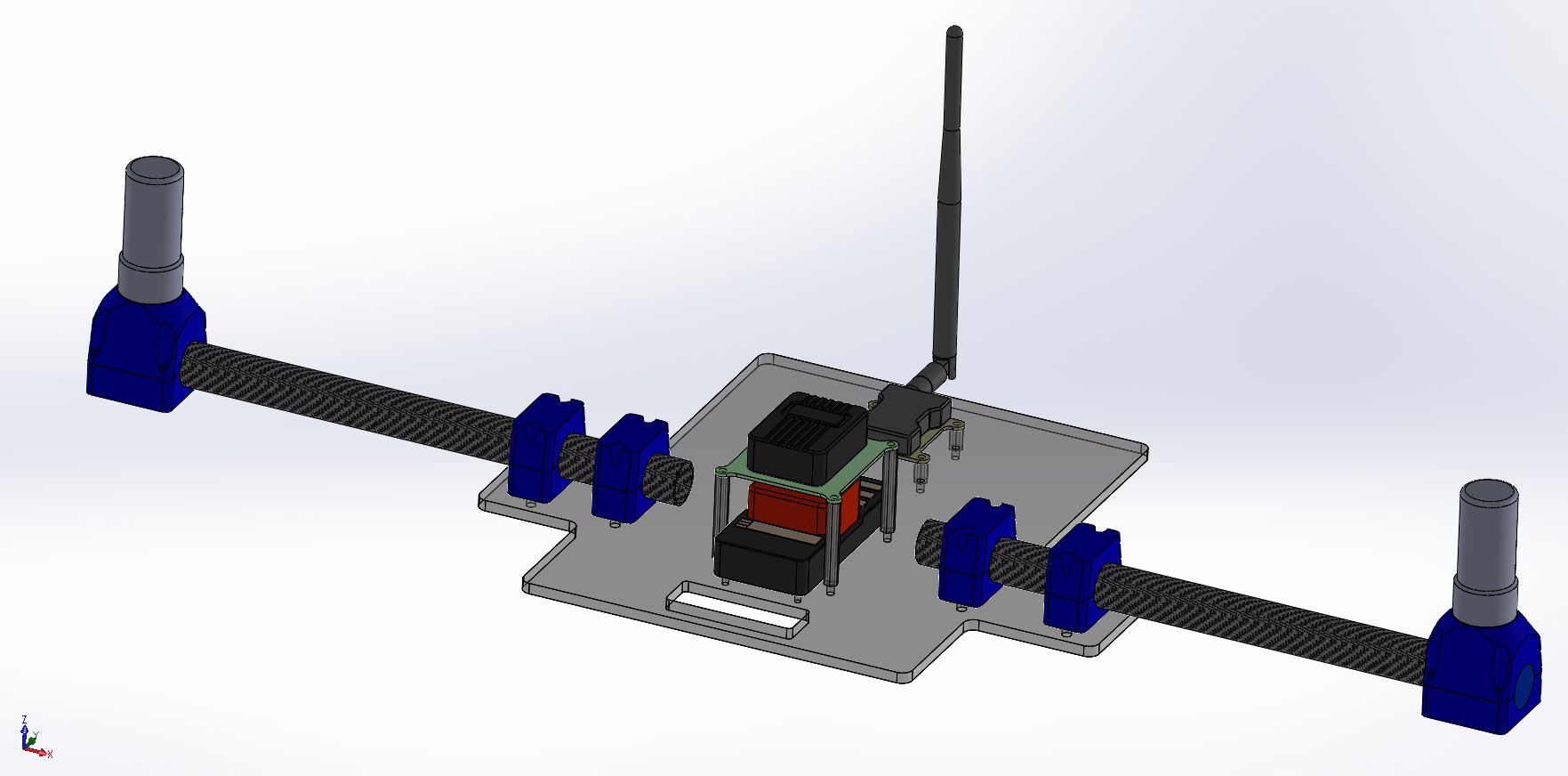
Next week I will have the milling machine free and I will be able to cut the motherboard and the GPS and telemetry boards.
Regards,
Raúl.
1 Like
I took delivery of a CUAV C-RTK2 HP today and set up a bench test using Copter 4.4.2.
Heading was derived quickly and remained stable and accurate. RTK injection resulted in a stable RTK Fixed state during a bit of a “walkabout” of the yard.
I had 19-24 satellites throughout with an HDOP of 0.5-0.7.
My initial impression is that this module represents excellent value and is likely a good candidate for use with ArduPilot, though it seems slightly less capable overall than the more expensive Zed-F9P based solutions.
I intend to install this module in a vehicle soon and will start a new topic on that when the time comes.
Thanks much to @cuav_le for shipping quickly once stock arrived and also for sponsoring some additional hardware along with my paid order.
4 Likes
Hello,
While I have the prototype so I can assemble and test the C-RTK 2HP, I’ll post some photos of the contents of the box.
When we open the box we see that the antennas and GPS are perfectly embedded in their foam casing and protected by their corresponding plastic bags.

When removing the foam from the box, we see that underneath there is a bag with the necessary connectors for the connection between GPS and autopilot.

Taking the GPS out of the protective bag we see an impeccably machined aluminum case.

On the right side we have the connector for antenna 1, which is the master (female MMCX connector), the PWR LED and the ST LED (its function is not mentioned in the manual).

On the lower side we have the CAN connections (JST GH 1.25 mm 4-pin female connector), the CAN LED and a USB type C connector.

On the left side we have the slave antenna 2 connector, the UART2 connector (JST GH 1.25 mm 4-pin female connector), the DSU connector (JST GH 1.25 mm 6-pin female connector) which is not mentioned for what it is used for. What is its function and the ERR, PVT leds (which are not referred to as its meaning or function by the manufacturer) and RTK that we can imagine what its function is and what it means.

It would be advisable for the product manufacturer to include in the manual the meaning of the LEDs and the possible use of the DSU data services unit connection.
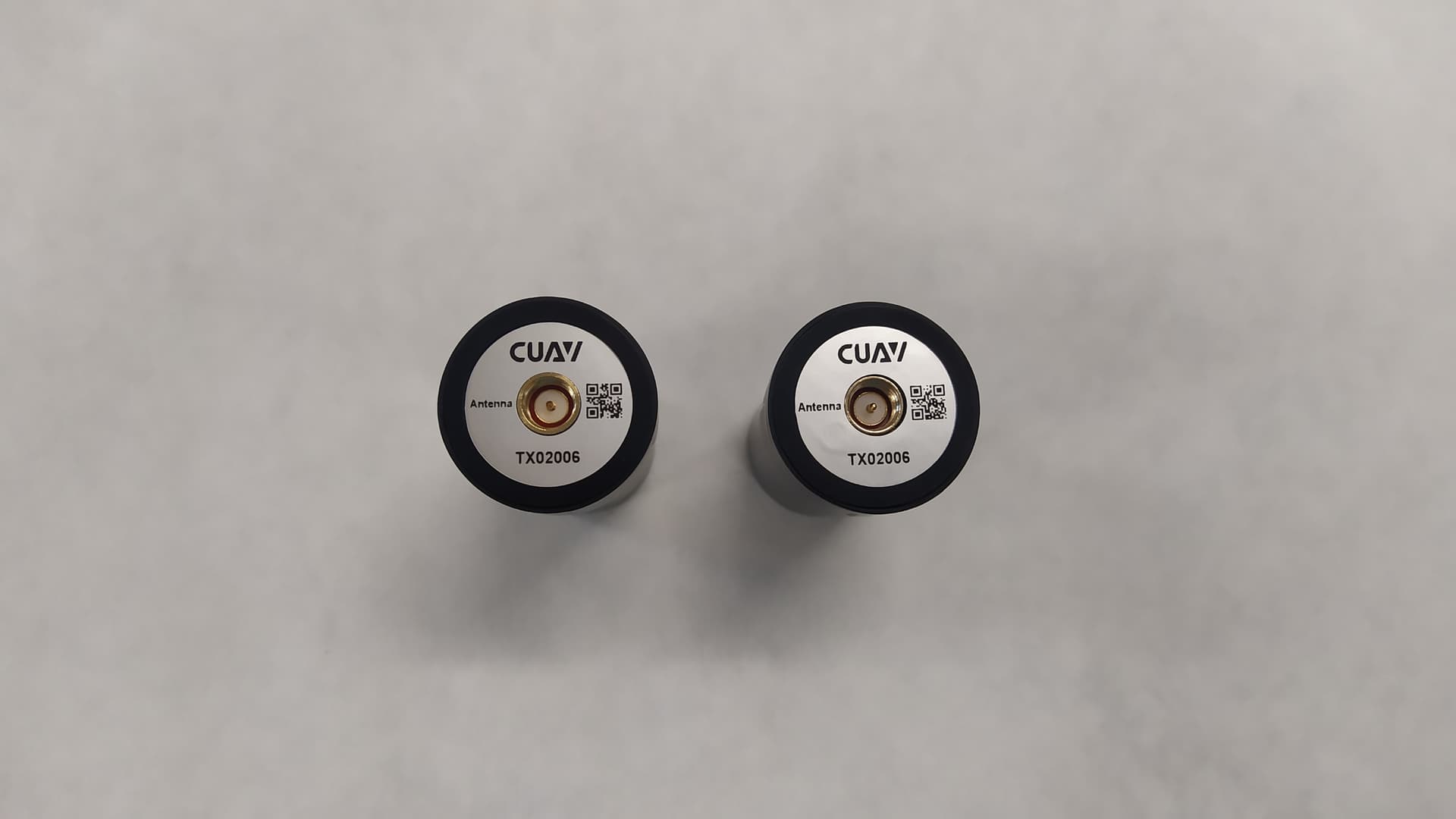
The antennas have the SMA type male connector and it catches my attention that they have an O-ring for sealing. Also the base of the antenna has a flat rubber gasket, it is a good detail to provide the system with some protection against atmospheric agents.
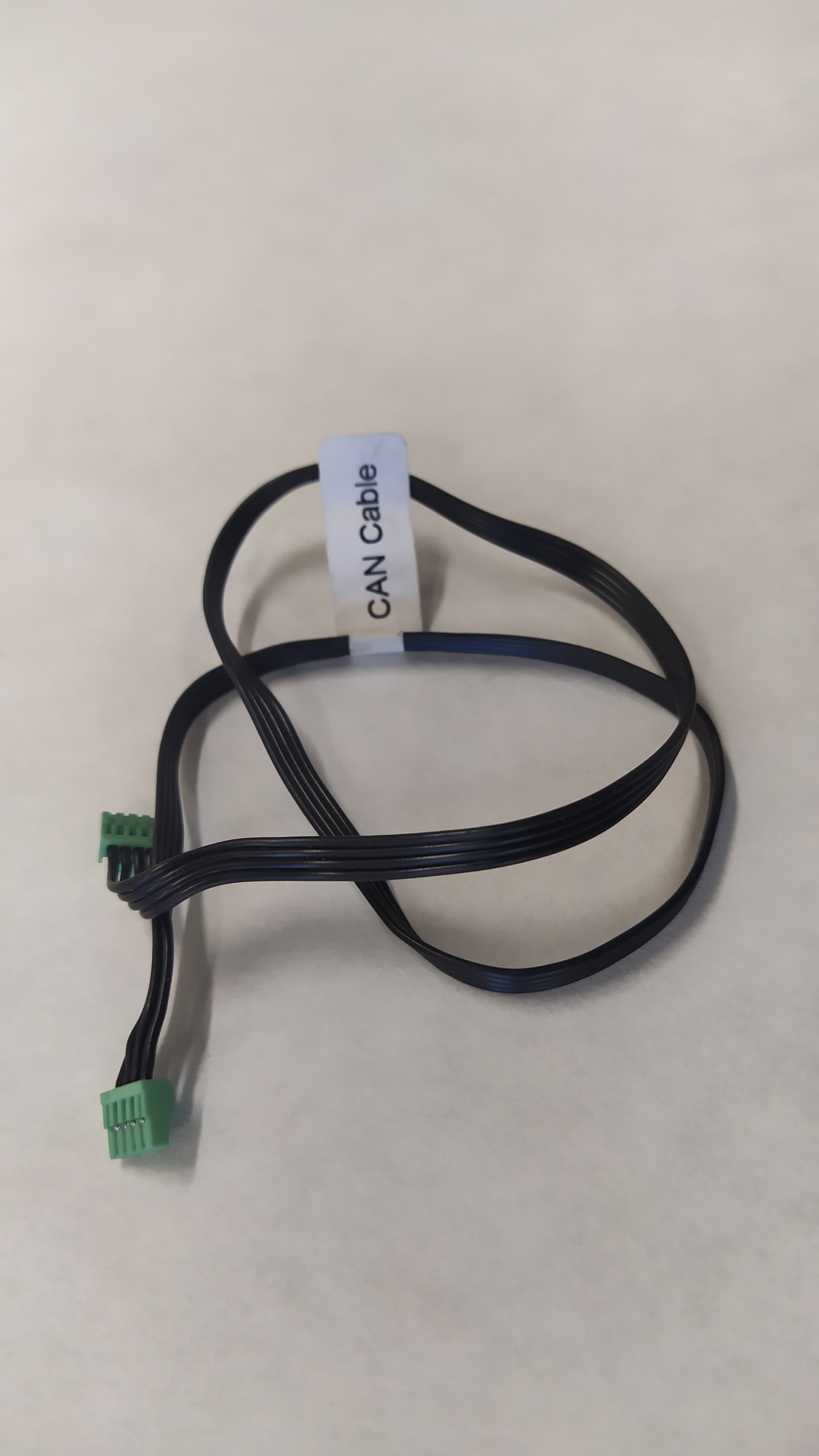
Regarding the cables we have:
A four-wire silicone cable about 360mm in length, marked CAN cable and 4-pin JST GH connectors.
A square-wire silicone cable of about 420 mm in length, marked with UART cable and JST GH connectors with 4 pins on one end and 6 pins on the other.

Two RF178 type cables, approximately 500 mm long, with a 90º angled male MMCX connector and a female SMA connector for connection to the antennas.

A USB 3.1, USB Type A to USB Type C cable with a length of about 1000 mm is included.

I hope to be able to mill the base plate and the GPS holder and telemetry holder plates and 3D print the parts that hold the arms this week to assemble the prototype and test the connection and operation of this C-RTK 2HP GPS.
Regards,
Raúl.
3 Likes
Can you do a detailed comparison test for C-RTK 2HP vs F9P?
2 Likes
That is my intent, though it may be a slightly skewed comparison, as I do not have a second set of helical antennas, and the ones I typically use with the F9P are probably more sensitive (large, survey grade).
2 Likes
@cuav_le I purchased C-RTK 2HP from your link and I hope it will work well in my helicopter.
1 Like
Here is a detailed tutorial that I hope will be useful to you.:
https://doc.cuav.net/gps/c-rtk-series/en/c-rtk2-hp/users-manual.html
3 Likes
Hello @cuav_le,
Yes it is very useful.
You can include in this manual the meaning of each of the LEDs that the C-RTK 2HP has and the possible use of the DSU connector.
The manual would be much more complete with this information that I request.
For the moment you can give us this information.
Thank you.
Raúl
2 Likes
I will add them in doc.cuav.net, thanks for the suggestions.
2 Likes
Have you received the C-RTK 2HP?
Do you have any updates?
Not just yet, though I have tentatively recommended the dual antenna module to others based on very positive bench test results.
I have an upcoming project that is taking a bit of time to get moving, but I intend for it to be well documented and will be using this GPS module for positioning and yaw.
1 Like

Hi I have Drotek F9P GNSS on i2c which works ok for several yers on octocopter with Cube Orange Arducopter 4.4.4. When it’s set to:
GPS_RATE_MS:200 (5 Hz)
I can get always RTK FIX
When I set:
GPS_RATE_MS:100 (10Hz)
I can get only RTK float
Why ? as I understand for better geotagged photos and position estimation 10 Hz should be better option ? Why it doesn’t work ?
I am getting RTK corrections via Mission Planner and RFD868 from local Ntrip provider.