Oggi ho fatto diversi voli di prova. Il drone si comporta bene dopo aver apportato le modifiche da te suggerite ed aver eseguito la configurazione come indicato nella documentazione di arducopter. Con un ammortizzatore più mordibo le vibrazioni sono leggermente diminuite, ma non abbastanza. Devo trovare un modo per ridurre le vibrazioni sull’asse z. Speriamo che come dice Dave siano le eliche sbilanciate. È possibile vedere lo spettro di frequenza sull’asse z? Questo sarebbe utile per dimensionare l’ammortizzatore. Quanto pesa il Pixhawk 2.4.8? Questo è anche un dato necessario per il dimensionamento. Grazie
ok, change these
INS_HNTCH_REF 0.14
MOT_SPIN_MIN 0.13
I would also change
INS_ACCEL_FILTER back to about 15 or 18, it’s unusual to have it so low for a small quad. Default is 20.
I believe a lot of the stability issues will be fixed by reducing vibrations. Without fixing vibrations there will be no cure and we will be masking the issue.
These values are typical of a F450 cheap frame BUT they are sanitised a bit to suit your situation before vibrations are fixed properly and give you a good starting point. It is up to you whether you use them or not, I think they’d be as safe as anything.
They wont suit a quad with lower vibrations, you will have to come back to me when ready to retune for lower vibrations.
INS_GYRO_FILTER,20
ATC_ANG_PIT_P,10.0
ATC_ANG_RLL_P,10.0
ATC_ANG_YAW_P,6.0
ATC_RAT_PIT_D,0.007
ATC_RAT_PIT_FLTD,10
ATC_RAT_PIT_FLTT,10
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_P,0.11
ATC_RAT_RLL_D,0.007
ATC_RAT_RLL_FLTD,10
ATC_RAT_RLL_FLTT,10
ATC_RAT_RLL_I,0.11
ATC_RAT_RLL_P,0.11
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,10
ATC_RAT_YAW_I,0.08
ATC_RAT_YAW_P,0.8
Take off cautiously and just use AltHold mode, only do some gentle movements (NOT lots of movements)
then land and disarm. Listen for strange motor noise and check for hot motors immediately upon disarming.
If that worked out OK you can arm and do more flying.
Let’s see the new log ![]()
EDIT
If you do get a strange mechanical sounding noise from motors, or hot motors, then reduce these
ATC_RAT_PIT_D,0.005
ATC_RAT_RLL_D,0.005
and even more in small steps until that issue goes away. Do not fly for more than a few seconds with that strange noise or hot motors.
Good morning,
I finally found the time to try the quad with balanced props. The problem of vibration on the z-axis remains, even if it seems to have decreased slightly.
How can I proceed now to reduce vibration further?
Thank you
You can safely set INS_ACCEL_FILTER,10
The Z axis vibrations are in the up/down axis so it’s usually thing like:
props overflying the arms or baseplates
arms bending, related to the point above
anything loose vibrating around in the prop wash
flight controller needs a better mounting system
Have you got a photo of the whole copter, and one of the flight controller with it’s mounting system?
All those wires hanging loose will be a problem. They need to be secured, but not so they dont have any flexibility near the flight controller where they plug in.
Can you mount the ESCs inboard, on the bottom plate? That’s not really important, but tidy up the motor wires too. Everything that gets hit by a burst of prop wash (after every blade passes overhead) causes another Z axis vibration. Obviously we still need to have arms for the motors to mount on so we cant get rid of those…
Is the GPS mast vibrating?
I havent used the buzzer or safety switch for so long now…
Throw them away and set
BRD_SAFETYENABLE,0
NTF_BUZZ_TYPES,0
In that log, vibrations are getting better, almost acceptable. If you can do a bit more it will be good.
And set these for next flights:
ARMING_CHECK,1
BATT_ARM_VOLT,11.00
BATT_CRT_VOLT,10.50
BATT_LOW_VOLT,10.80
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
GPS_GNSS_MODE,5
INS_ACCEL_FILTER,10
INS_HNTCH_FREQ,44
INS_HNTCH_BW,22
INS_HNTCH_REF,0.105
INS_LOG_BAT_OPT,2
INS_HNTC2_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTC2_MODE,0
INS_HNTC2_REF,0
INS_HNTC2_FREQ,94
INS_HNTC2_BW,20
INS_HNTC2_HMNCS,1
we’ve fine tuned the dynamic harmonic notch filter, and added a static notch filter.
I would definitely try these too, adjusted a little from the ones I sggested previously
INS_GYRO_FILTER,40
ATC_ANG_PIT_P,6.5
ATC_ANG_RLL_P,6.5
ATC_ANG_YAW_P,5.0
ATC_RAT_PIT_D,0.007
ATC_RAT_PIT_FLTD,20
ATC_RAT_PIT_FLTT,20
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_P,0.11
ATC_RAT_RLL_D,0.007
ATC_RAT_RLL_FLTD,20
ATC_RAT_RLL_FLTT,20
ATC_RAT_RLL_I,0.11
ATC_RAT_RLL_P,0.11
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,20
ATC_RAT_YAW_I,0.08
ATC_RAT_YAW_P,0.8
Hello,
I removed the safety switch and the buzzer. I changed the parameters as you indicated. I haven’t had a chance to test it in flight. Maybe tomorrow. I don’t know how to arrange the wires coming out of the flight controller and I think the gps vibrates, but I’m not sure. I would almost like to try to remove the anti-vibration support of the flight controller and attach it to the frame with the soft adhesives of 3M; what do you think?
Thank you
That could certainly be a valid solution - every build is different so there is often some trial and error involved.
Hello, today I flew with your parameters. Find the log here: log-f450 - Google Drive
I heard a slight clanking noise coming from one of the engines. I haven’t been able to pinpoint from which.
Thank you
@xfacta is the expert here so I expect to be set straight, but I think there’s still an issue with the filters. A couple of the parameters for the second filter aren’t set right and it’s still acting like a dynamic filter, not a static one. Set:
INS_HNTC2_MODE, 0
INS_HNTC2_HMNCS, 1
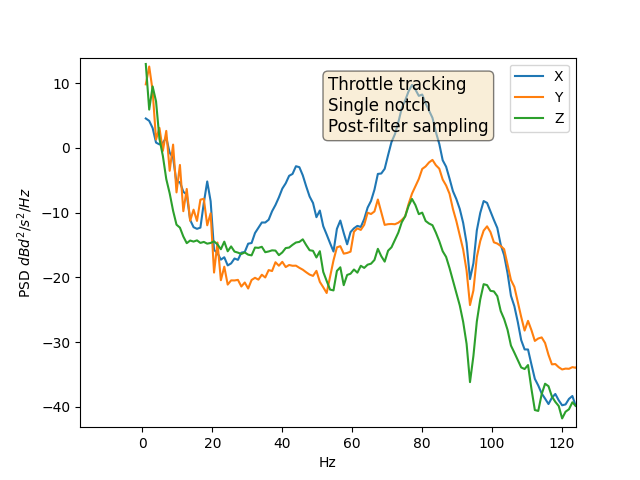
For the record here’s what I see when I plot the FFT graph: (I’m still trying to get used to these logarithmic graphs …)
Vibrations are better - not perfect but probably good enough.
@Allister is correct, I’ve given you 2nd-rate settings for the static notch, try these:
INS_HNTC2_MODE,0
INS_HNTC2_HMNCS,0
No need to even chase a harmonic in this case, there is just one frequency to target.
And lets fine tune the main harmonic notch
INS_HNTCH_FREQ,40
INS_HNTCH_BW,30
Set this
BATT_FS_LOW_ACT,3
Strangely attitude control is quite good, even if it is a bit noisy.
The problems are quite evident in the motor outputs though, oscillating wildly.
Let’s try to tame those “noodle arms” (Trade Mark registered to Dave)
INS_GYRO_FILTER,30
ATC_RAT_PIT_D,0.055
ATC_RAT_PIT_FLTD,15
ATC_RAT_PIT_FLTT,15
ATC_RAT_RLL_D,0.055
ATC_RAT_RLL_FLTD,15
ATC_RAT_RLL_FLTT,15
ATC_RAT_YAW_FLTT,15
by lowering the filters and lowering the D terms
This might take some of that motor noise out, and hopefully reduce the oscillating motor outputs.
In this case you are lowering the D terms, which should make life easier for the motors, but for your info:
When ever you test changes to "PID"s always hover for a minute or less, land and check motor temperature, then resume testing if temperature is OK.
A D term issue can also be heard in the motor noise as a grinding or “metallic” sound that you will know when you hear it.
These are examples of parameters that typically affect the motor temperature:
ATC_RAT_PIT_D
ATC_RAT_RLL_D
ATC_RAT_PIT_P & ATC_RAT_PIT_I
ATC_RAT_RLL_P & ATC_RAT_RLL_I
The two D terms listed are the critical ones to watch out for, but changing those other P and I values in relation to D can also be an issue.
Just a question but why would one use a log scale on the FFT graph for the type of analysis we are doing here? I have done a lot of sound and vibe analysis (NVH as its called in the Auto Industry) and log scaling surely has it’s place but if we are simply looking for fundamental frequency peaks and their harmonics the compression effect of the log scale is not helpful.
I agree, log scale isn’t my first choice. But in this case it came down to part technical issue and part laziness. For some reason I can’t get the FFT graphs to work in MavExplorer on my Macbook, but mavfft_isb.py does work. You can option different scales in mavfft but I’m still figuring that part out as to what works best for me, and log is the default.
Maybe fodder for another thread, but I am curious about why it seems the FFT tools seem to be moving towards log scales.
Good evening,
I changed the parameters as indicated by xfacta and only yesterday I was able to do a test flight. Unfortunately, the UAS yaws to the right as soon as it takes off and doesn’t seem to react to the related stick command. I leave the link to both the log and the configuration file. Thank you
https://drive.google.com/drive/folders/1tuQLcRN7pN1TFH5lNEv9RAKAj5tnuECD?usp=share_link
Motor outputs are oscillating very badly.
I think in my last bunch of params to change there was a mistake and these should have been
ATC_RAT_PIT_D,0.005
ATC_RAT_RLL_D,0.005
so please set thes updated values!
But that doesnt explain the yaw problem, nor did the copter fly enough to for anything else ![]()
If that mistake did cause the motor output oscillations to be so bad, then the yaw problem might have been because there was no effective attitude control.
I would do the compass calibration again after you get a good DPS 3D Fix, and then disable the internal compass
COMPASS_USE,0
Definitely upgrade firmware to latest stable, there are important fixes!
and set
ARMING_CHECK,1
BATT_FS_LOW_ACT,2 or 3
The arming check gives you warnings about many issues before even attempting a flight. Without the arming checks there could be problems that could be easily solved, but you wouldnt know until it becomes a bigger problem. It is essential to just work through any problems the arming check highlights rather than disable it.
It should be OK to try another test flight then. Start in AltHold instead of Loiter. Just do hovering and some gentle movements. If everything is going OK then try Loiter.
Thanks xfacta I really don’t know how to thank you for all the expertise and time you put at my disposal. I will do as soon as possible what you suggested and then I will give you a feedback.
Sorry xfacta, one more piece of information for greater security. Which platform should I choose when having a Pixhawk 2.4.8 to update the firmware?
Thanks
In firmware select Pixhawk1 for a 2.4.8 or similar.
Not FMUv2 or FMUv3
I did everything as you said, but now it doesn’t arm itself anymore and it returns the voice message you find here: Droni - Google Drive
I’m unable to listen to media at the moment
What does it say?
If you are connected to MissionPlanner there are Messages
EDIT:
I could not understand the language but it seems like there is no GPS 3D fix
You have to be outside with a good GPS signal
If you set LOG_DISARMED,1 then attempt arming a .bin log will be recorded and you can send us a link to that.
Afterwards set LOG_DISARMED,0