Hi, I bought the propellers as you suggested. From the bottom of my lack of experience I would like to ask you a question. The flight problems started and worsened after an accident in which the drone hit branches and fell from about 3m. The trolley and the gps support broke. I have repaired and replaced all propellers. It seems strange to me that the flight problems, so important, are due only to the imbalance of the propellers. Could it be the IMU, an ESC or a failing motor? Is there a method for making a diagnosis? Thank you
Not much you can do to diagnose a bad IMU unless it’s producing error messages or the level changes over time. This can signal a damaged IMU. Use Mission Planners Motor Test and run each motor at various % of full throttle and determine if they are all running smoothly. Props off of course.
Ok, go ahead. I’m not sure I’ve followed the correct ESC calibration procedure. Can you tell me how to proceed with the ESCs that are installed? Thank you
I use Dhsot on everything, calibration not required. But tthe semi-automatic method is suggested:
ESC Calibration
I am waiting for the new propellers. In the meantime, I reset the ESCs and calibrated them with the procedure you told me.
Is it possible to graph the vibrations on the z axis and the revolutions of the four engines with the log analysis tool?
Thank you
You would need to be running Dshot with either ESC Telemetry or thru Bidirectional Dshot firmware to get motor RPM. Neither of which are possible with those old tech ESC’s you have.
I understand. Thank you
Today I measured, with an external accelerometer, the vibrations of each single engine with the throttle at 50%. These are the results:
| Motore | X [m/s2] | y [m/s2] | Z [m/s2] |
|---|---|---|---|
| A (1) | 0.198 | 1.81 | 1.58 |
| B (4) | 0.367 | 1.24 | 1.58 |
| C (2) | 0.303 | 1.01 | 2.4 |
| D (3) | 0.159 | 0.55 | 0.629 |
The D engine seems to be the one that vibrates the least, while the C the one that vibrates the most on the Z axis.
How can these values be interpreted?
Thank you
No idea really as I have no reference for a good or bad motor with that data.
While waiting for the new propellers, after having reset everything, I put the drone in flight. I flew with the standard parameters.
At take off it yaws to the right and it seems that the engines cyclically lose power with a continuous up and down of the drone.
Plotting the RCOU parameter it is noted that motors 3 and 4 cyclically go to positive full scale. Plotting the DesYaw parameter you can see an impulse to the right that I have not given, therefore a yaw to the left given by me and again a yaw to the right that I have not given. DesRoll and DesPitch also have rectangular shaped pulses that I didn’t give. How do you interpret it?
Hi Walter,
not much we can do without a .bin log file.
Bad vibrations and a flexible frame can cause those bad oscillations you see, but a log file will tell the story.
EDIT
Do you know if those ESCs produce 5 volts on their red wire? If so disconnect all but one of those red wires and safely terminate them.
Plotting DesRoll vs Roll and DesPitch vs Pitch we see that the impulse does not correspond to a change in the attitude of the drone, while DesYaw vs Yaw to the impulse corresponds to a change in attitude as verified in reality.
I was wrong. The first two square peaks relate to the armament of the engines. The last one in phase, however, is not related to the disarming of the engines.
can you upload that .bin log file?
I’m sorry. I thought I did. You can find it at this link: https://drive.google.com/file/d/1E43iqgnSOcWkH2it8kwjL3rnuNgo2ZU-/view?usp=sharing
I don’t know if I understand correctly. By connecting the battery, from the red wire of the three small wires coming out of the ESCs and connecting to inputs 1 to 4 of the FC I measure a voltage of 5v.
Vibrations are getting to be bad, see if you can secure the wiring and anything else that is loose.
You might even need to change to softer mounts for the flight controller.
Ensure none of the wires are pulling on the flight controller or rubbing against it.
In the past with small light weight flight controllers, I’ve added weight to their case. I used double sided tape to hold on a small flat lead weight on the outside of the case, centrally mounted. I took a fishing sinker and hammered it flat and square. You could even mount it underneath and out of sight.
It might help since it can be difficult to change the soft mounts to something softer.
Everything else looks how it should be as far as parameters are concerned, this should fly how it is. I believe the vibrations are the big problem.
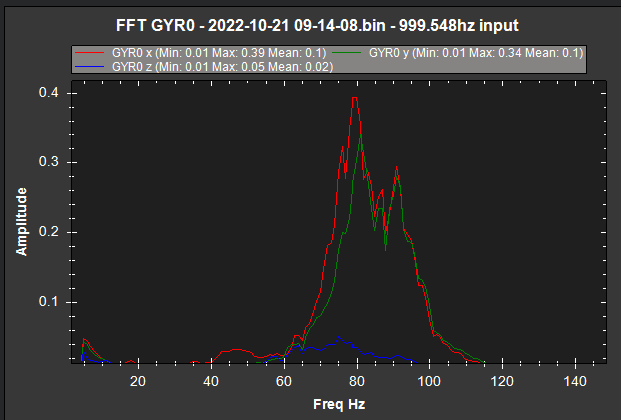
Set these, the harmonic notch filter will help a lot after vibrations are brought under control
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.16
INS_HNTCH_FREQ,80
INS_HNTCH_BW,40
INS_HNTCH_ATT,40
No
This is regarding the 3 small signal wires that come from each ESC to the flight controller
A lot of ESCs have a voltage regulator in them, a “BEC”, for powering servos or a receiver.
The problem is when all ESCs are connected to the same + and - rails those BECs start to fight each other and overheat. This has been known to cause problems with the ESCs.
The idea is to have only one ESC put 5 volts on the + servo rail of the flight controller, and 3 of the ESCs would have their red +5volt wires safely isolated and terminated.
The ESCs really only need their black 0volt wire and white signal wire connected to the flight controller. Putting +5volts on the servo connectors is convenient for later when you want to plug in a servo or something that needs 5 volts to power it.
I dont think this is going to fix your flight problems, it’s just one of those issues to look out for and fix before it causes problems.
All right. I proceed to set the harmonic notch filter and to disconnect the red cables of three out of four ESCs. Then as soon as it stops raining I try it in flight.
Then I try to apply a softer cushioning system. The FC is currently installed on the special anti-vibration base.
While waiting for the new non-self-tightening props, I’m looking for a way to balance the ones I have self-tightening.
Thank you
Today the flight was much more stable. It no longer rotates on the y axis, while it still oscillates a little bit up and down. Here is the flight log.
https://drive.google.com/file/d/1W7aLFuv7Yk9f0DjbjNZfSmNKD9LRPxpu/view?usp=sharing
Thank you