On the last few flights the drone yaws and goes up and down without control. The telemetry gives me the error: “Subsys 25 Ecode 1 Thrust_loss_check-1” What does this mean and how can I fix it? Thank you
It means what is says, thrust loss. This usually means output(s) have been maxed out and stabilization is compromised. A few things could be responsible. Post a link to the .bin log file.
Thank you. Here is the link to the log: https://drive.google.com/file/d/12Lk_sA8dUSJd9S9EhuA2XNMzNbDykjKv/view?usp=sharing
The motor outputs are oscillating badly hence the thrust loss error.
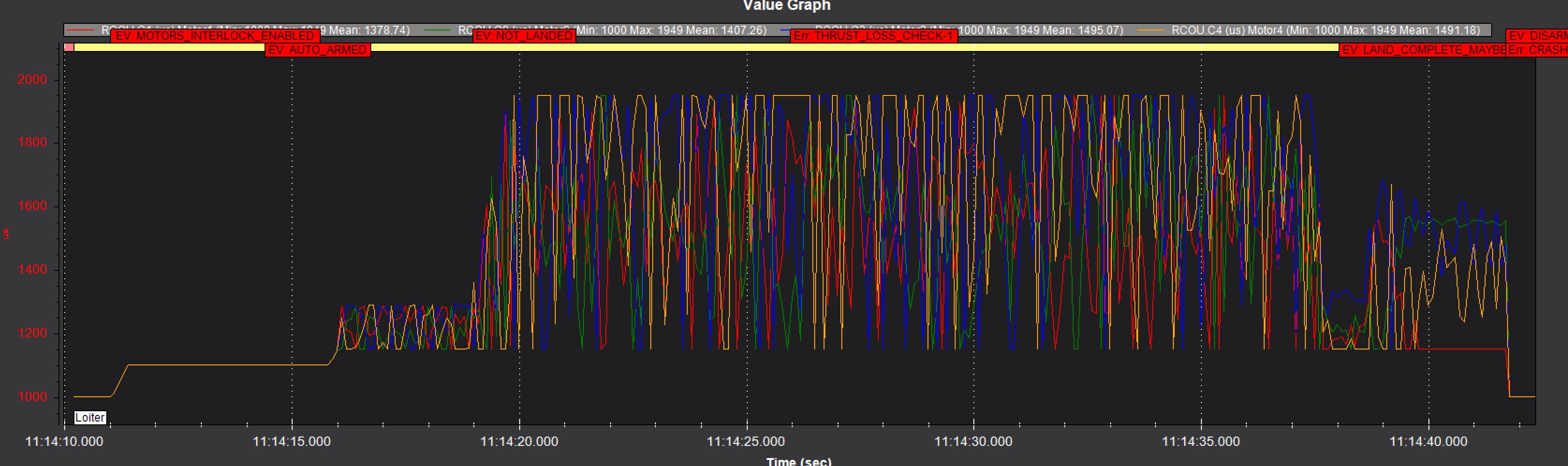
Drop the Rate Pitch and Roll P&I values to half of what they are now and make another flight. Once the oscillation is gone hover in Althold or Loiter until it’s hovering at mid-stick then set these parameters as per the tuning guide based on MOT_THST_HOVER.
PSC_ACCZ_I
PSC_ACCZ_P
Then you can start basic tuning starting with configuration of the Dynamic Notch Filter.
OK thanks. I try and then I update you. But why does he do this now if he used to fly well with the same parameters?
Hi, I did as you said and this is the flight log: https://drive.google.com/file/d/1mZdddn53KCaYP6nJbor173_4n96ZFGwx/view?usp=sharing
It is more stable but the revs of the motors drop and then resume, also it gave me the failsafe of the battery even if after the flight the voltage was at 11.8v. I don’t understand. I ask you to help me I am a beginner. Thank you
Outputs are still oscillating but you now have a proper hover thrust value (.179) so, set these:
PSC_ACCZ_I,.36
PSC_ACCZ_P,0.180
Your Vibration levels are higher than desirable in the Z-axis. This will make it more difficult to tune.
Set this to 1 as you need to configure the Dynamic Notch Filter, INS_LOG_BAT_MASK.
Set this to 10, INS_ACCEL_FILTER
Make another AltHold hover flight.
The battery wasn’t fully charged when you started and it dropped to 9.74V triggering the low battery failsafe which you have at 10.5V.
Hi, I configured the parameters as you told me and ran the flight. I measured, with the tester, the battery voltage before the flight (12.56v) and after the flight (11.84v). Here is the log: https://drive.google.com/file/d/1k7MqEWgpkLKaOVGKSNq9IvfSwnBGzuej/view?usp=sharing
I await your indications and in the meantime I thank you very much for the time you are dedicating to me.
Outputs are still oscillating. Lower the Rate Pitch/Roll P&I to .04 and D to .01.
Describe the components on this craft (Frame, Motors, props, ESC, battery))
The battery is simply dropping to below FS threshold:
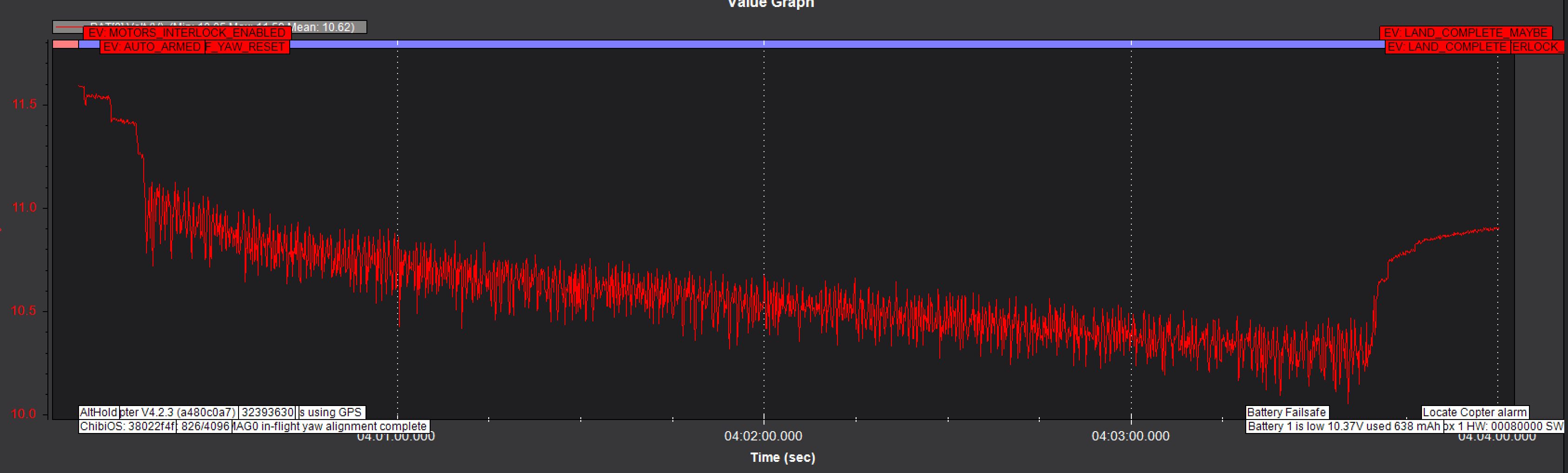
It’s typical that a battery will be a lower voltage under load. It will have recovered some when you did the post flight test.
Hi, I have configured the parameters as you indicated. Tomorrow afternoon I’ll take it in flight.
The drone configuration is: Dji F450 frame, LHI 2212 920kv Brushless Motor, 9.4 * 1.2 inch propellers, ESC LHI 30a Brushless Regler, Youme battery 11.1V LiPo battery, Lipo 3S RC 4500mAh 60C batteries.
Thank you
Well that’s odd. That craft should actually fly on close to default parameters. How is the Flight Controller mounted? Got a photo of this craft?
At the link some images of the drone.
https://drive.google.com/drive/folders/1c3lL8u8SwdpXdOwqUQEyJZsNAP3oDi8j?usp=sharing
File format error trying to open those.
It looks like the GPS mount is up against the Pixhawk case. If it is you can’t have that. And those self tightening props are not easy to balance and you have a Z-axis vibration problem. I would replace those with standard props you can balance.
Hi, the GPS support is not against the Pixhawk case, it is only partially under and does not touch.
I will buy some more propellers. Are 9045s OK?
Could the cause of the vibrations be one or more damaged motors?
Thank you
Yes, that prop size is right for that setup. I suppose it could be a damaged motor but then you would expect a lack of thrust and I don’t see that.
I thought it might be a bent crankshaft due to an impact. I would like to try to detect the vibrations produced by each engine on the bench; it’s possible?
Is it possible to balance the self-locking propellers?
Thank you
You can buy a long threaded rod for that purpose and rest it on the top of a drinking glass. I would just replace the props and use nuts.
Yes, I replace the propellers. I just wanted to figure out how to balance the self-locking ones. Thank you