I was able to translate that a little bit, this is the setting you need to make:
BARO_OPTIONS,1
Some of these Pixhawk 2.4.8’s come with the wrong (or different) barometer fitted. This option will treat MS5611 as MS5607 and that problem should be solved.
I changed the baro_options parameter, but the error continues and is as follows: “Prearm Baro GPS alt error 5329mbars (see Baro_alterr) - Prearm check fs_thr_value”
Thanks
HI,
I did as you said, but he doesn’t arm himself. Telemetry tells me: “Pich (CH1) is not …; Roll (CH2) is not …”. I can’t read the continuation of the sentence.
Find the logs here:
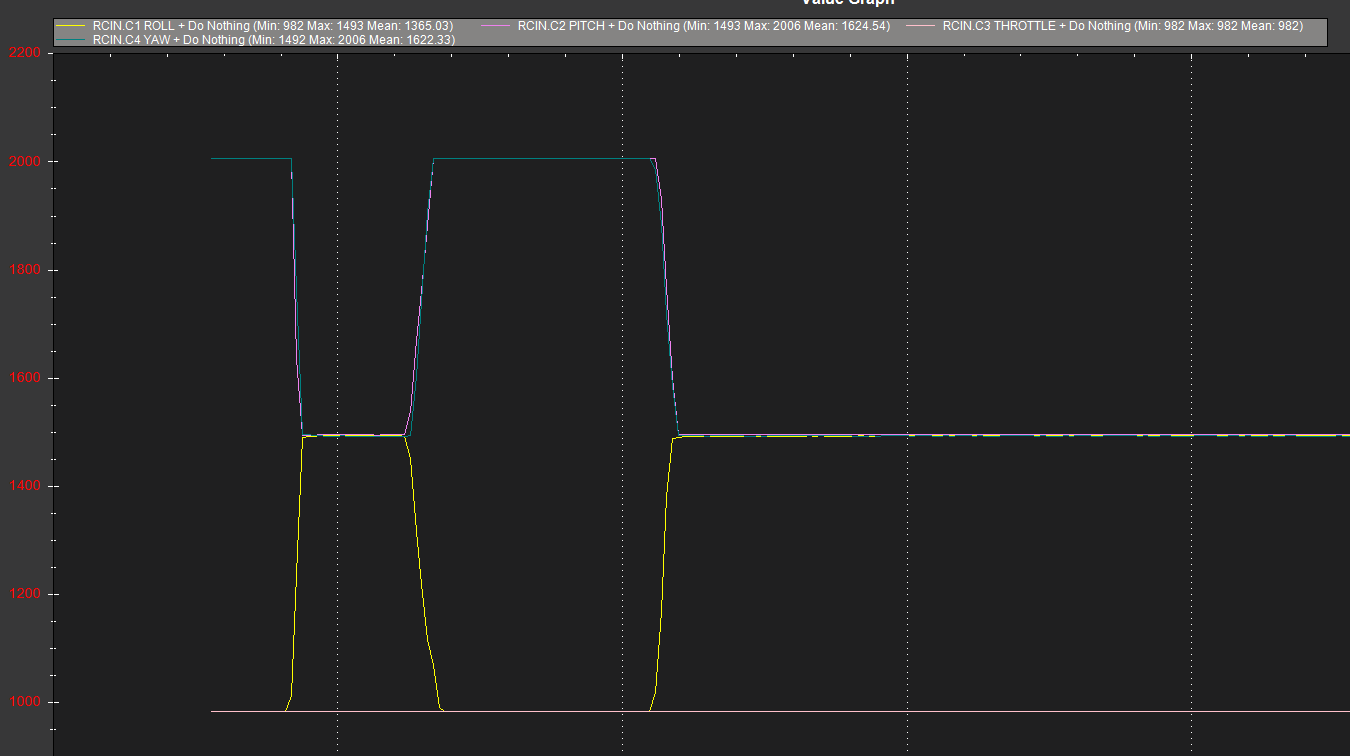
Arm: Roll (RC1) is not neutral
Arm: Pitch (RC2) is not neutral
means the RC sticks are not centered. Remove any trim settings on the transmitter and redo the RC calibration in MissionPlanner.
The log file dated 1970 means there was no GPS signal to get the correct date, that’s usually not a problem when you dont have LOG_DISARMED and you are outside flying this thing
Also you can set
BRD_RTC_TYPES,3
just to technically fix it.
It is certainly possible there is a problem with the flight controller.
In that log there is only an issue with the RC input, everything else is working OK at that stage.
What transmitter and receiver is it, and how is it connected to the pixhawk?
If there is no alternative I would do is load Rover Firmware (no need to configure anything) then load Copter firmware again. This should wipe all traces of previous settings and install a fresh copy of the firmware.
Then do the whole configuration from the beginning:
Mandatory calibrations
Set up the voltage and current monitor
Initial Parameters (with suggested settings)
and these should get you on your way:
ATC_ANG_PIT_P,6.5
ATC_ANG_RLL_P,6.5
ATC_ANG_YAW_P,5.0
ATC_RAT_PIT_D,0.007
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_P,0.11
ATC_RAT_RLL_D,0.007
ATC_RAT_RLL_I,0.11
ATC_RAT_RLL_P,0.11
BARO_OPTIONS,1
BRD_SAFETYENABLE,0
GPS_GNSS_MODE,5
INS_ACCEL_FILTER,10
INS_HNTCH_BW,45
INS_HNTCH_ENABLE,1 ← set this then refresh to see the rest
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_FREQ,90
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.11
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
HI,
today, after reloading the firmware and configuring the UAS with the parameters you indicated, I tried to make it fly, but it won’t arm itself and it won’t send me the telemetry. I leave you the link to the logs: Droni - Google Drive
Thank you
Thank you.
In fact it’s so. I was using Autel’s method of arming the UAS.
Yesterday evening I managed to receive telemetry on the remote control and arm and disarm. Today I try to take off.
Could you please explain to me how to extract the graph of the image?
Thank you
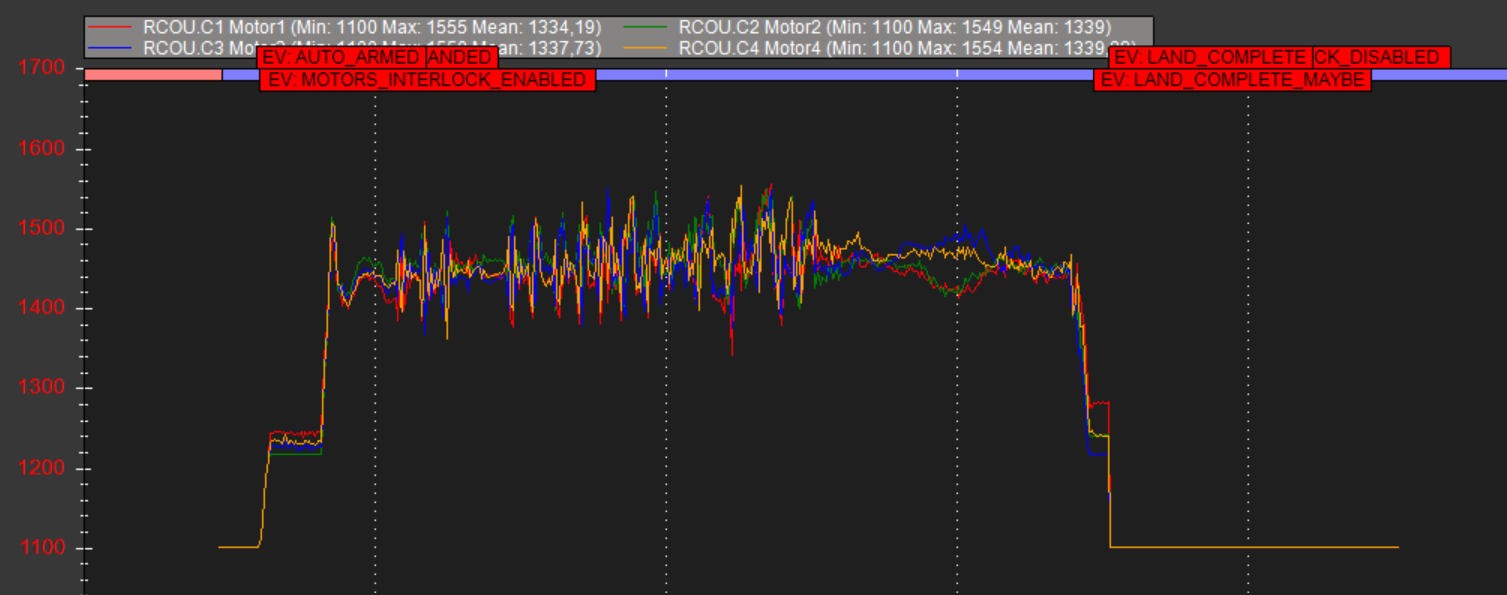
Vibrations are high. This will give you trouble.
Work on reducing the vibrations before flying more, or you risk a fly-away (vibration compensation should engage but you dont want to rely on that).
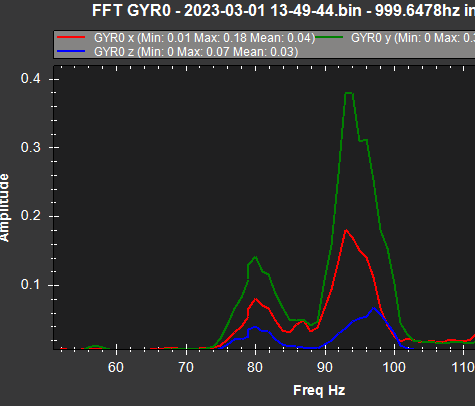
I suspect there is some motor mount or arm twist since the motor outputs tend to indicate that (although very noisy at this stage) and there’s two frequencies close together
So I would say leave the HNOTCH settings as they are for now, recheck later,
but definitely try to find any twisting arms or twisted motor mounts and get them straightened out.
I would leave any attitude control or PID adjustments until those points above are sorted out, then you may be able to make more refinements and run Autotune to finish it off.
HI,
I made some modifications to reduce the vibrations and today I did some test flights. From what I can read of the log file, it seems to me that the vibrations have decreased. Can you confirm it? At the link the flight logs: Droni - Google Drive
Thank you
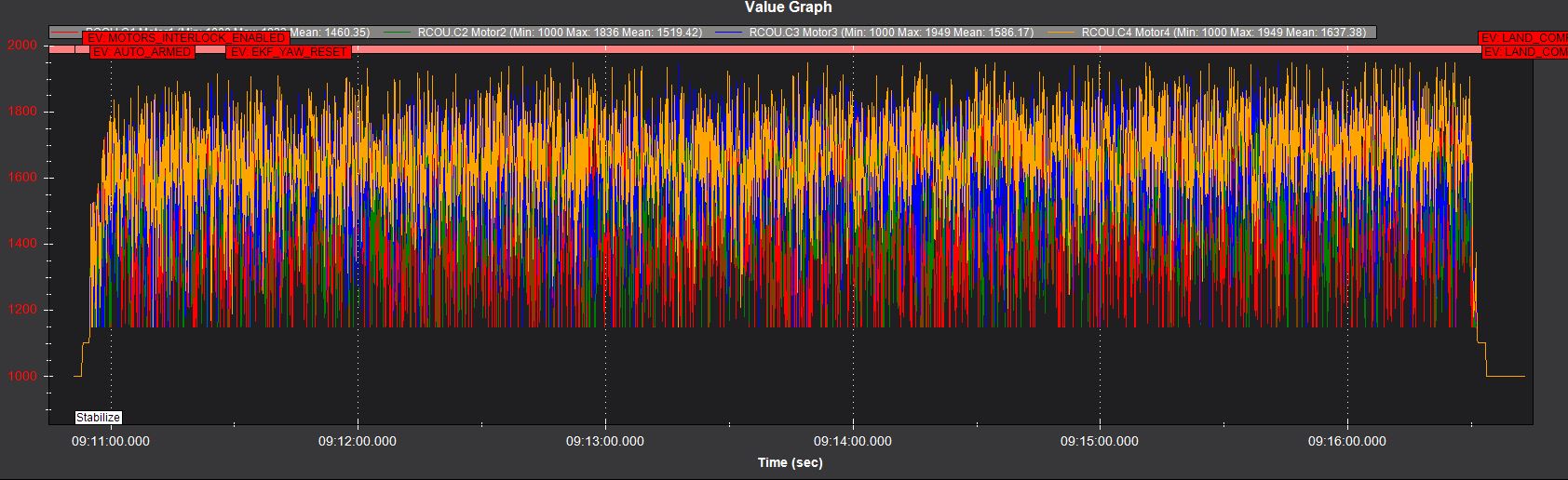
Here’s a picture of an aircraft that does some slightly more aggressive tils maneuvers to 30 degrees of tilt in pitch and roll.
This aircraft is also still not finished and the tune is still a bit off. At hover, the values shouldn’t really oscillate at all. They will not be completely still but very close to each other.
@dkemxr I made the configurations you indicated to me, but as you predicted they didn’t have many effects. Now I try to change the roll and pitch PIDs. Here the link to the log of the last flight. Droni - Google Drive
Still bad oscillation. You will have to drop the PID’s further. Set the Rate Pitch/Roll D-term back to default (half of what they are now) and the P&I values to .07. You can just try the D-term 1st and see the result or just drop them all.