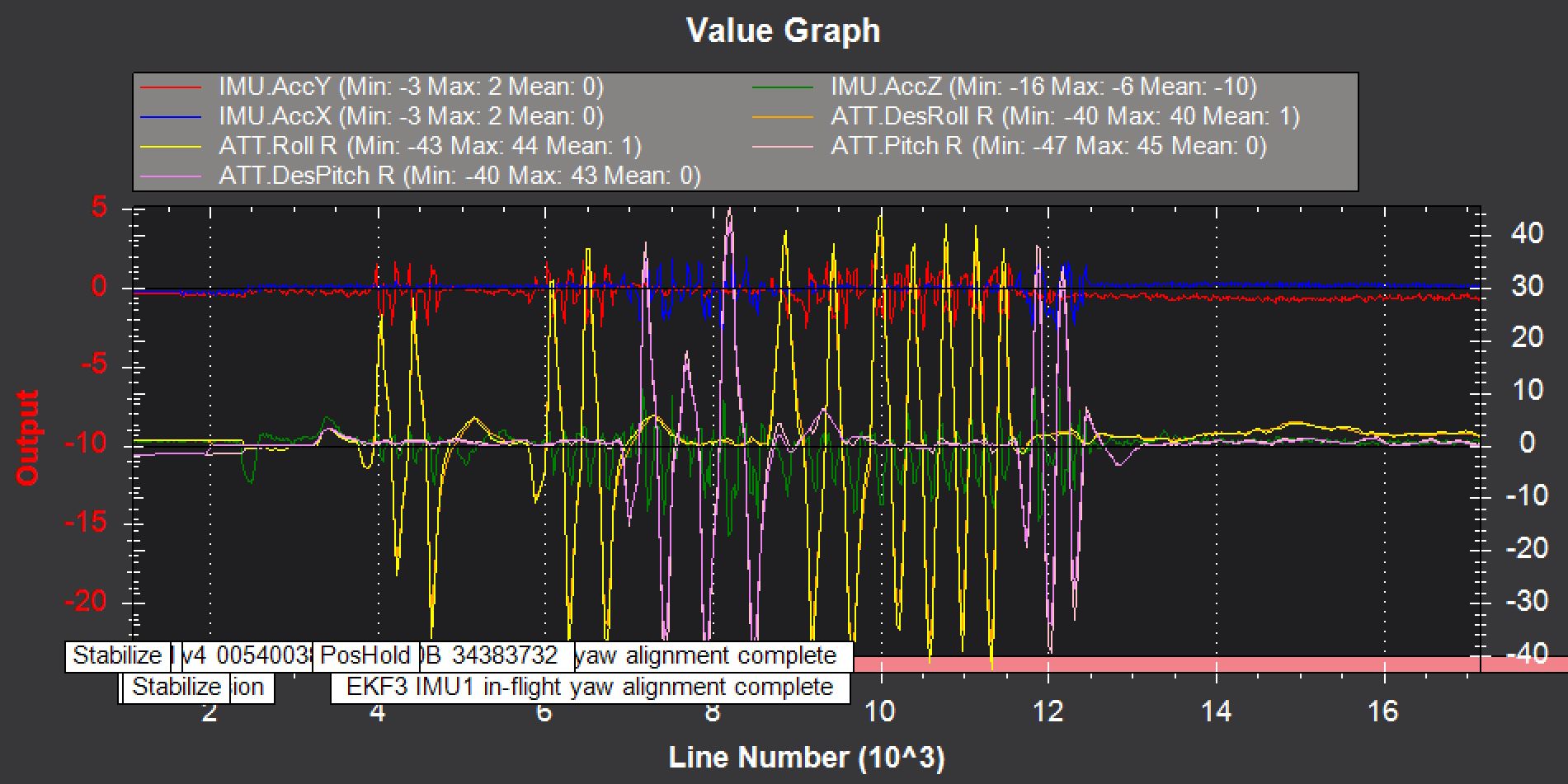
These are T-Motor 9.5’’ props. Vibration should be ok. I made some tests in the beginning of the flight to check responsiveness. So the vibes are due to my pitch and roll commands:
These are T-Motor 9.5’’ props. Vibration should be ok. I made some tests in the beginning of the flight to check responsiveness. So the vibes are due to my pitch and roll commands: