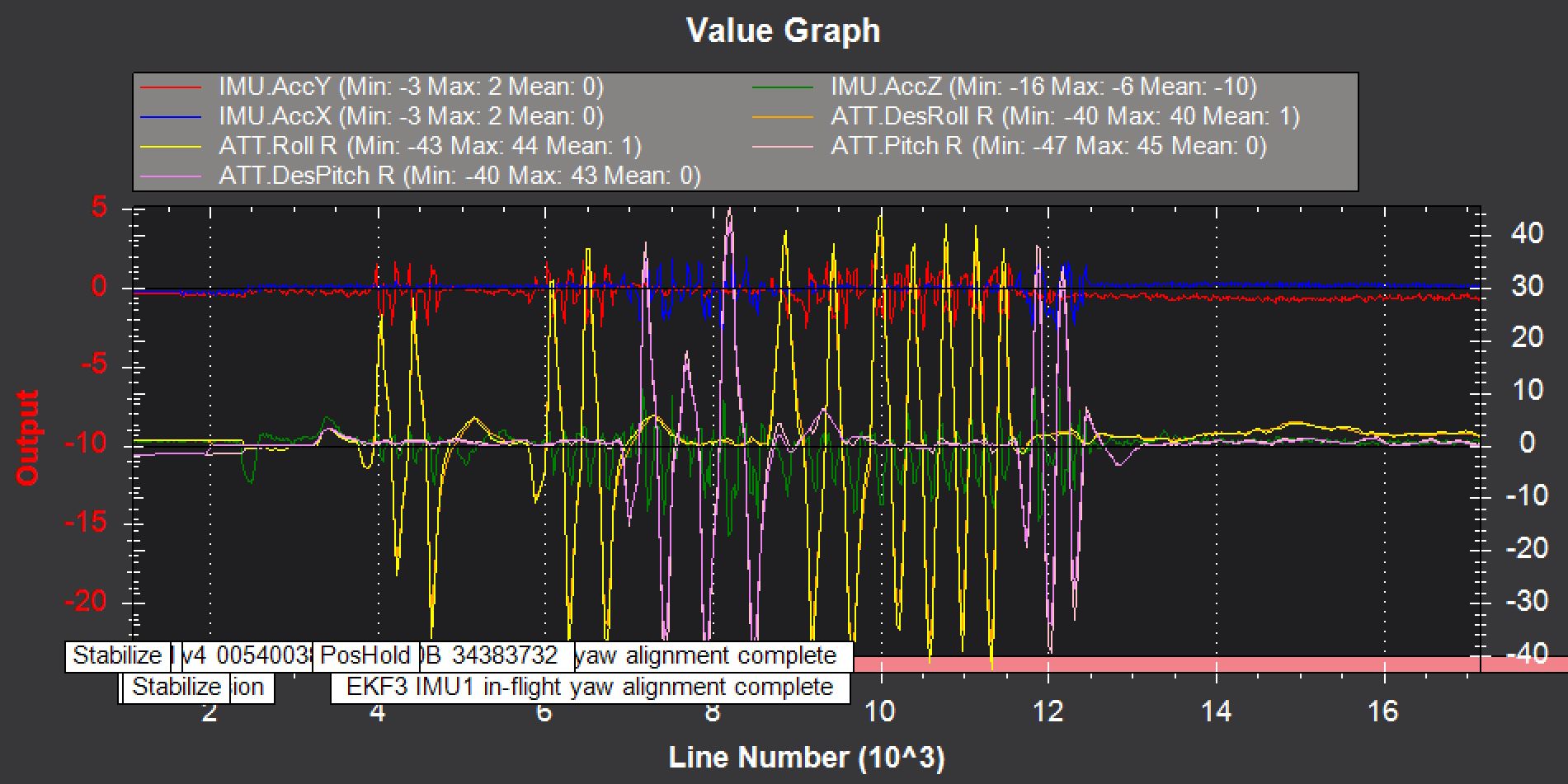
These are T-Motor 9.5’’ props. Vibration should be ok. I made some tests in the beginning of the flight to check responsiveness. So the vibes are due to my pitch and roll commands:
Hi Thorsten,
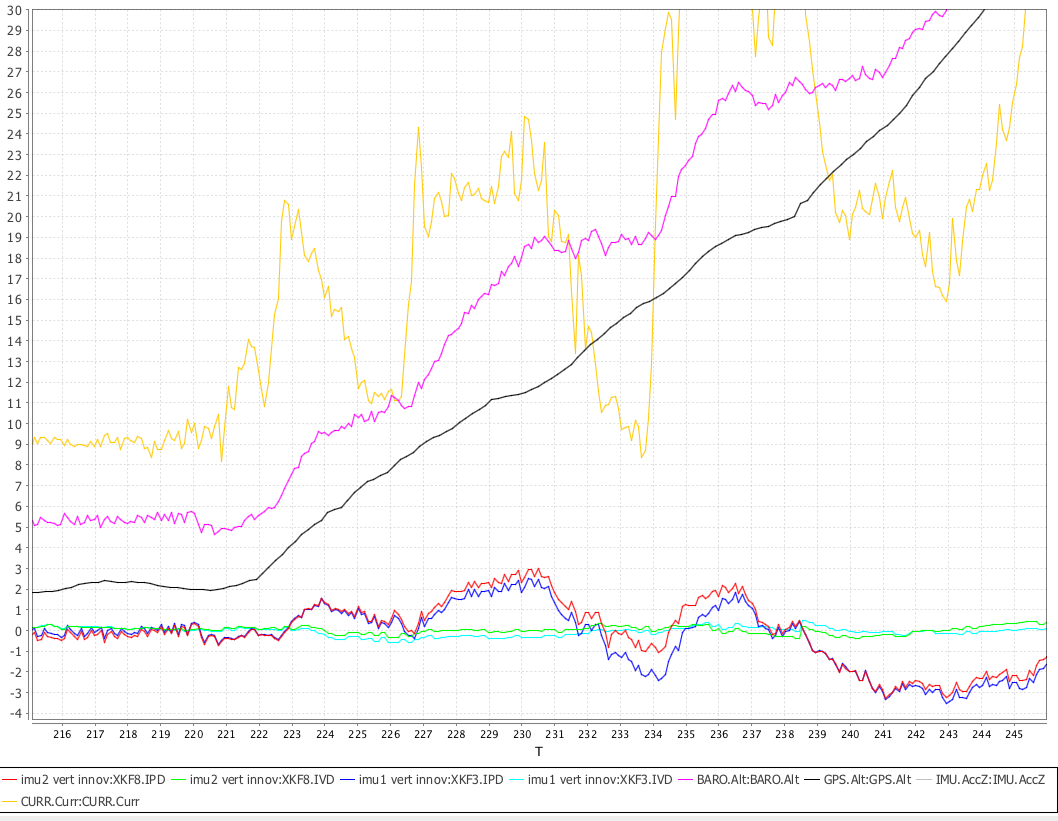
This looks like an EKF 3 problem to me. I can see the throttle spike is caused by an attitude error progressing through the control loops, not a acceleration progressing up. So I suspect the EKF 3 has an issue with the altitude prediction. This is further supported by the divergence from both the GPS height and Baro height.
The innovations are also going crazy (XKF3.IPD). I would need to forward this onto someone else to look at though as I am getting out of my depth.
After a preliminary analysis I have spotted a few anomalies:
- During up and away flight, thrust variation is causing ±2 m of baro variation. This effect needs to be reduced because it creates a feedback loop resulting in low frequency throttle surging.
- The landing ground effect compensation is activated externally to the EKF in mid-flight and baro fusion is blocked temporarily (innovations flat-line) which should not happen.
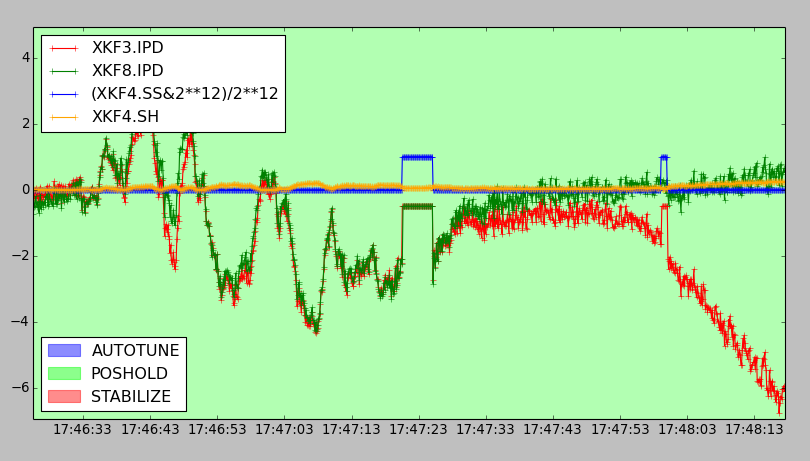
- After the landing ground effect flag clears and baro fusion resumes, the IMU1 EKF height solution moves away from the Baro, but the innovation test ratio does not increase by much indicating that the height state variance is rapidly increasing. This indicates that the covariance matrix has become badly conditioned as a result of stoppage of baro fusion.
To investigate this further I need to know which version of SW was being flown. EKF3 is still in the developmental stage, so unless you are experimenting with range beacons, visual odometry or required some specific feature that EKF3 provides, I would recommend you switch to EKF2.
Thanks @Leonardthall and @priseborough for having a look!
The Firmware Version was V3.5.0 (633501f9).
Yes, I switched back to EKF2 and since then all is fine. But, I am always happy to test new stuff… Hope it helps in some way.
I’ll try different foam. Thanks!
Hello
I have the same problem ,i noticed that when the quad is moving in fast forward or sideways the altitude randomly increases with some jerks and when stopped it tried to level
Also i have tried hovering in high winds and the altitude aggressively increases with jerks from roll and pitch axix ,and in low wind condition its calm n only behaves aggresively when moves
After this issue i moved from 4.0.1 to 4.0.2 and the flights were stable in both the conditions but after 4 day same issue.
Help
Will post the log files