Hello,
After an autonomous flight with GUIDED mode, providing external navigation data from SLAM system and not GPS, I realized that the two cores of the EKF2 differed in the position estimation (around 1,5 m of difference in 15 sec at takeoff).

2d flight to confirm :
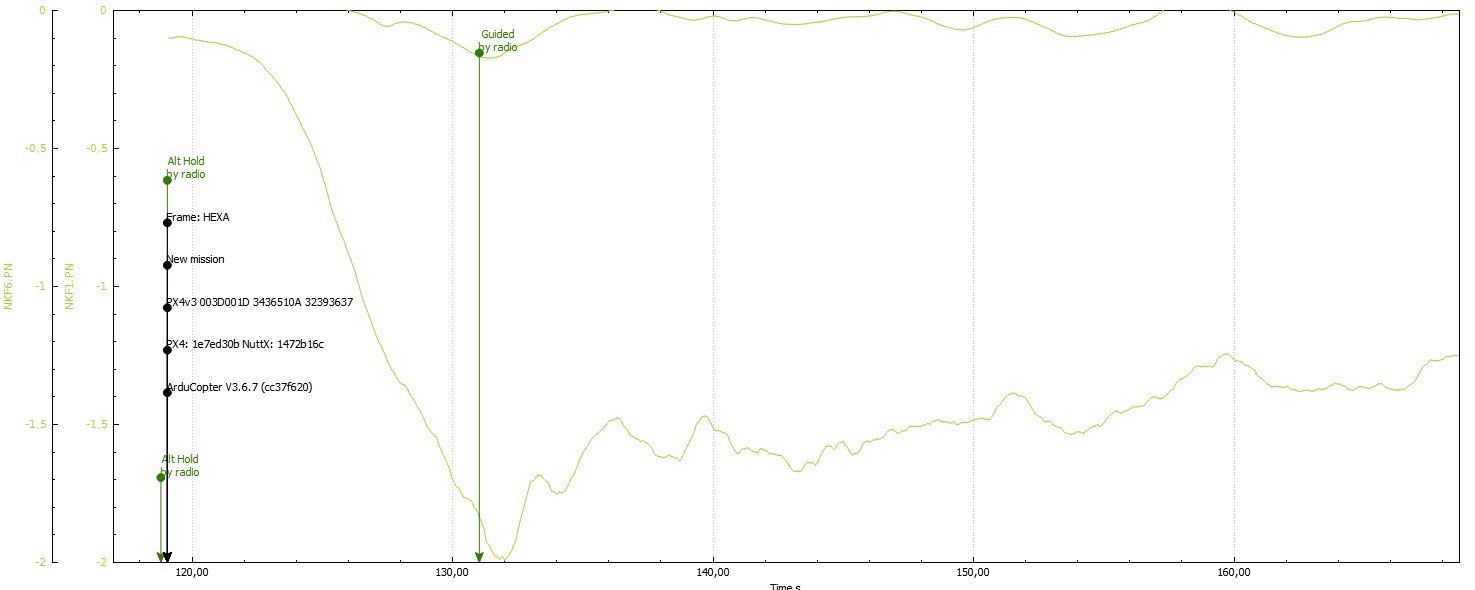
The core0 is based on IMU1, and core1 on IMU2. Both IMU are coherent, but there is an offset on the acceleration for all axis (around 0.2 m/s/s). Is the problem can comes from this offset ? Or do you have another idea where it can comes from ?

After a new calibration, I still have the same behavior about IMU’s data.
Thanks for your interest
8 01-01-2000 01-04-02.bin (1017.4 KB)