Hi Guys
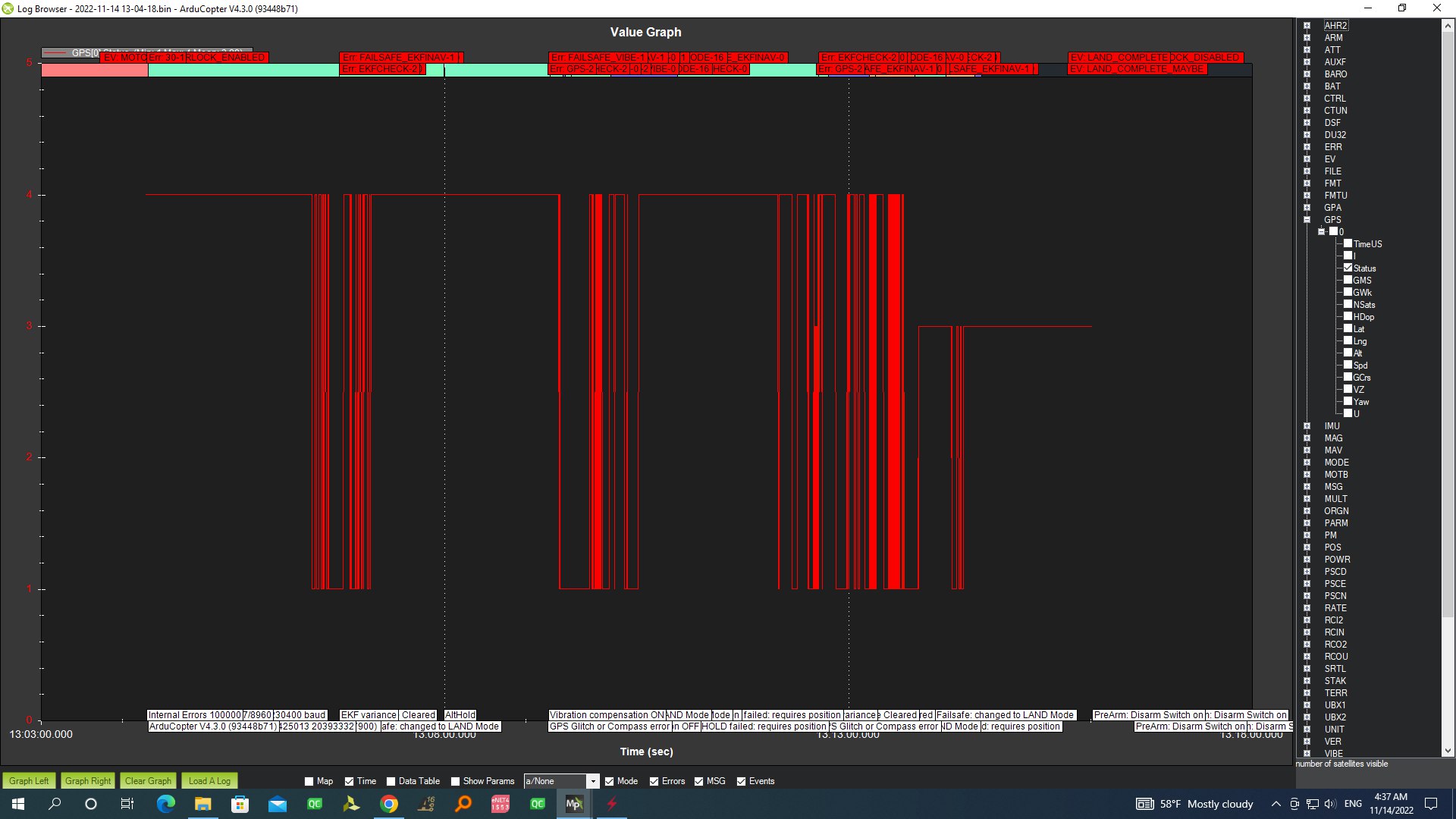
Today I had a flight test with arducopter v_4.3.0. During flight EKF variance error produced and Copter lost GPS multiple times. In my previous tests also it happened on the ground tests(with version 4.2.0).
What I did:
1- Changed GPS serial port
2- Change GPS module
3- Changed GPS wires and connectors
4- Tested Arducopter some versions
But still have problem. Any idea and help appreciated.
Here is GPS status log during flight.
I had a similar problem with a Here3 GPS, and was produced because the support screw were to long and too tight… when I release the screw, the GPS start working just fine. May be the screw bend the electronic board inside and bring this kind of problems.
Thanks for your reply.
I’m using ublox neo-M8N GPS module. In it’s box, the GPS board is not under pressure and I think it’s fine. I also checked while it was open.
@amilcarlucas
Yes I have tried to place it far away from other electronics and placed it on the GPS holder used for copters.
I always test it in football pitch with most clear sky view. It detects 14-15-16 satellites during test.
@amilcarlucas
So you mean it’s due to interference?
OK, I’ll test tomorrow and give you my test result. I will place GPS more far away from other equipment.
Can GPS power supply cause this issue?
Yes, all those errors come from the GPS receiver, not the Ardupilot firmware.
GPS Glitch are per definition GPS signal errors.
Yes, low power supply voltage can and will also cause issues.
Thanks @amilcarlucas
I’ll try with some modification in GPS installation and share the result.
Do you have any idea about the message “Logger Stock Thread”? It also happens occasionally. Should I ask it in another post?
The rule of thumb prescribed by the manufacturers is to position the GPS 10cm away from any device that creates a magnetif field (Motors, Motor wires, Battery wires, ESC ect.). I printed a GPS mask 10 cm long so the diagonal distances in red arrow are more than 10 cm away.
I don’t know if the receiver antenna, VTX antenna and the Telemetry antenna will cause GPS interference but I can’t really do anything about it anymore. Reactions from the experts will be appreciated regarding how I positioned the GPS relative to the other components. If they does cause interference, any recommendations for improvements would be nice.
Hi
I increased the length of GPS stand and also put an aluminum plate under the GPS (for blocking radiation interference from my radio link and other modules) and tested my quadcopter. The test was good and seems the problem has solved.
Here is the picture of GPS module:
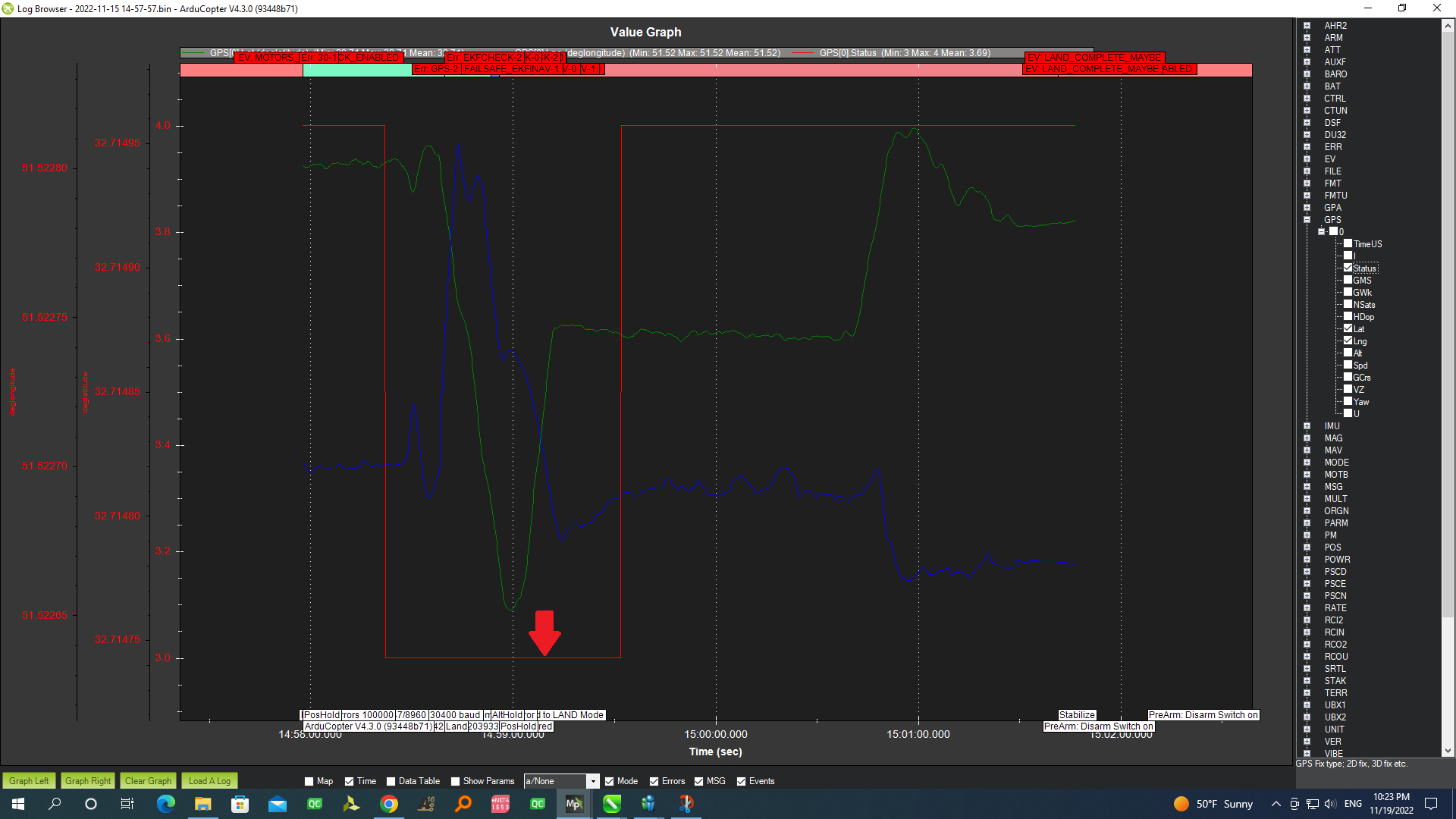
But at my last test, the EKF Variance error and failsafe occurred and the copter went to land mode. I checked the log file for GPS status but it seems OK! lat and lon also seems OK.
You might need to calibrate the compass after moving that GPS. It looks like an effective change, did you connect that ground plate to 0 volts (ground) ?
I don’t know it it will help to wrap the wires from the GPS to the FC with copper tape. You insulated the GPS with the aluminium plate but you did not insulate the wires. They are nearer to the interference sources (i.e. Motors, ESC). I jnsulated mine and have no problems so far. Did it help??? Sorry, I cannot prove it. The copper tape weight is negligible so it will not hurt wraping the wires. If you have opened up the OEM copters, they also wrap the GPS wires with copper tape.
I have not had to take any action like that on any craft even a tiny 3” with a stack of everything one on top of the other with the GPS module as the tree topper.
Did you use Magfit for the compass and motor interference calibration?