Hello, I am new to ArduPilot and I took my drone out for its first flight last week. It went well for about 5 minutes until it suddenly tumbled to earth and crashed. Looking at the log, I see there were two messages right before it started tumbling: “EKF LANE SWITCH 1” and “EKF PRIMARY CHANGED:1”. I’ve been trying to lookup how to interpret these but not having luck. If I look at the drone’s attitude throughout flight it looks fine until the EKF LANE SWITCH 1 where it seems broken. Any advice? Thank you.
There’s high Z vibrations causing clipping events. You need to get the vibrations sorted out before you go too much further.
Vibrations can sometimes be a result of the flight controller mounting, or the airframe. But the first place to look is the props. If you have a Z vibration make sure your blades are all tracking together and none are bent. Also look at the motors and make sure they feel good and there is no loose mounting. Never hurts to go over the airframe and make sure everything is tight.
Thank you Allister. It’s likely the flight controller mounting. Can you point me towards where I can learn about Z vibrations/clipping events? Also are you saying the vibrations caused the crash? Thank you.
I didn’t go too deep into the log, but since you said this is a new build this is something to check. There are going to be contributing factors on first flight. The tuning isn’t correct, the filters aren’t set up, etc. Vibration issues on top of all that can cause lots of issues. You’ll need to get the vibrations sorted out before you can really do an effective tune.
This EKF3 Lane Switching occurred during my testing of the aircraft. Yes, this is due to high vibrations, in my case, the source of vibrations was the internal combustion engine. However, this EKF3 Lane Switching process is not the cause of the crashes, and this helps save the model from an crashes thanks to the algorithm for switching to another set of sensors, see the documentation here EKF3 Affinity and Lane Switching — Plane documentation . Watch my video on the timestamps 11:25 to 11:35 Testing trener DOMINO, Holybro DURANDAL and Internal Combustion Engines (ICE) - YouTube . The aircraft had problems from vibrations only in AUTO mode, but it flew along the points of the route. Now I used rubber vibration isolators on the engine and conducted tests, the vibrations became less than the permissible level Испытания виброизоляторов на самолёте DOMINO - YouTube .
The community here is almost all volunteer. You will likely get very good answers, but have some patience. For example, I am posting from a remote job site at my regular job, answering what I can, when I can, between events to kill a little down time.
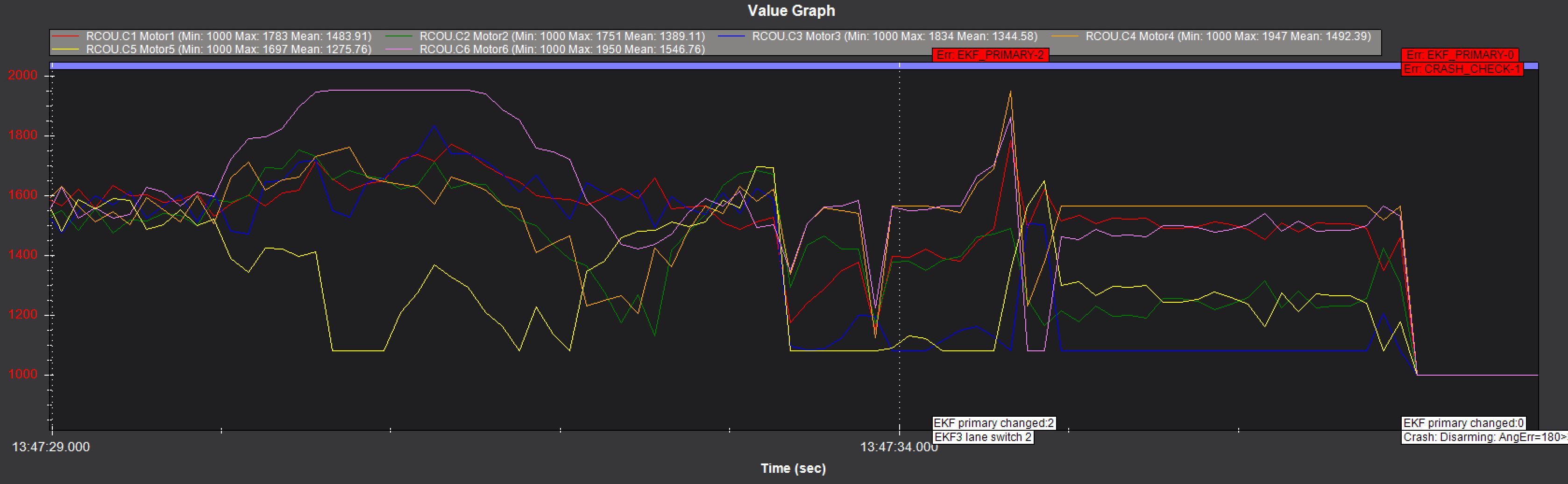
It crashed due to thrust loss on Motor 6, Motor 5 dropped to Stabilize and down it went. Classic signature in the attached graph. The EKF errors are incidental but it does look like you have the Internal compass as primary and the CAN external as secondary. Switch those.