When we checked the vibration log data, it is between 30 and 60 m/s/s (although it isn’t preferable) but doesn’t exceed 60. And the GPS and barometer data injection is good. But EKF primary lane is switched to lane 1. We don’t know how it is happened. And honestly, we can’t interpret the log data meaningfully. Please help us and find the problem. Here is the.bin file.
The vibration levels must be under 15. You correctly already identified the problem, your vibration levels are too high and that causes EKF lane switches and all other kinds of havoc.
Make your frame stiffer and do all other vibration mitigation hardware changes.
1 Like
What some other said about the problem is that because the cube orange plus has internal vibration damping, it’s more sensitive to vibration for low frequency of big motor like hobbywing X-9 which is also our drone’s power system. So, he suggested that we should use flight controller with no damping. And when we use Holybro Pixhawk 6C FC with that exact same power system, z-direction vibrations are also between 30 and 60 and X- and z-direction are under 30 although EKF lane switching not happened. He said it is because of altitude error. So we should try PSC tuning. I can’t find specific documentation for PSC tuning for ArduCopter. Could you explain me what is PSC tuning?
The is the position controller. The tuning is described on section 13 of How to methodically tune (almost) any multicopter using ArduCopter 4.4.x
1 Like
Could you give us some suggestions about the above FC changing case?
Reduce the vibration levels by stiffening the frame.
1 Like
Cube orange is a great FC. And reducing the vibration is good for any fc
1 Like
Hello amilcarlucas,
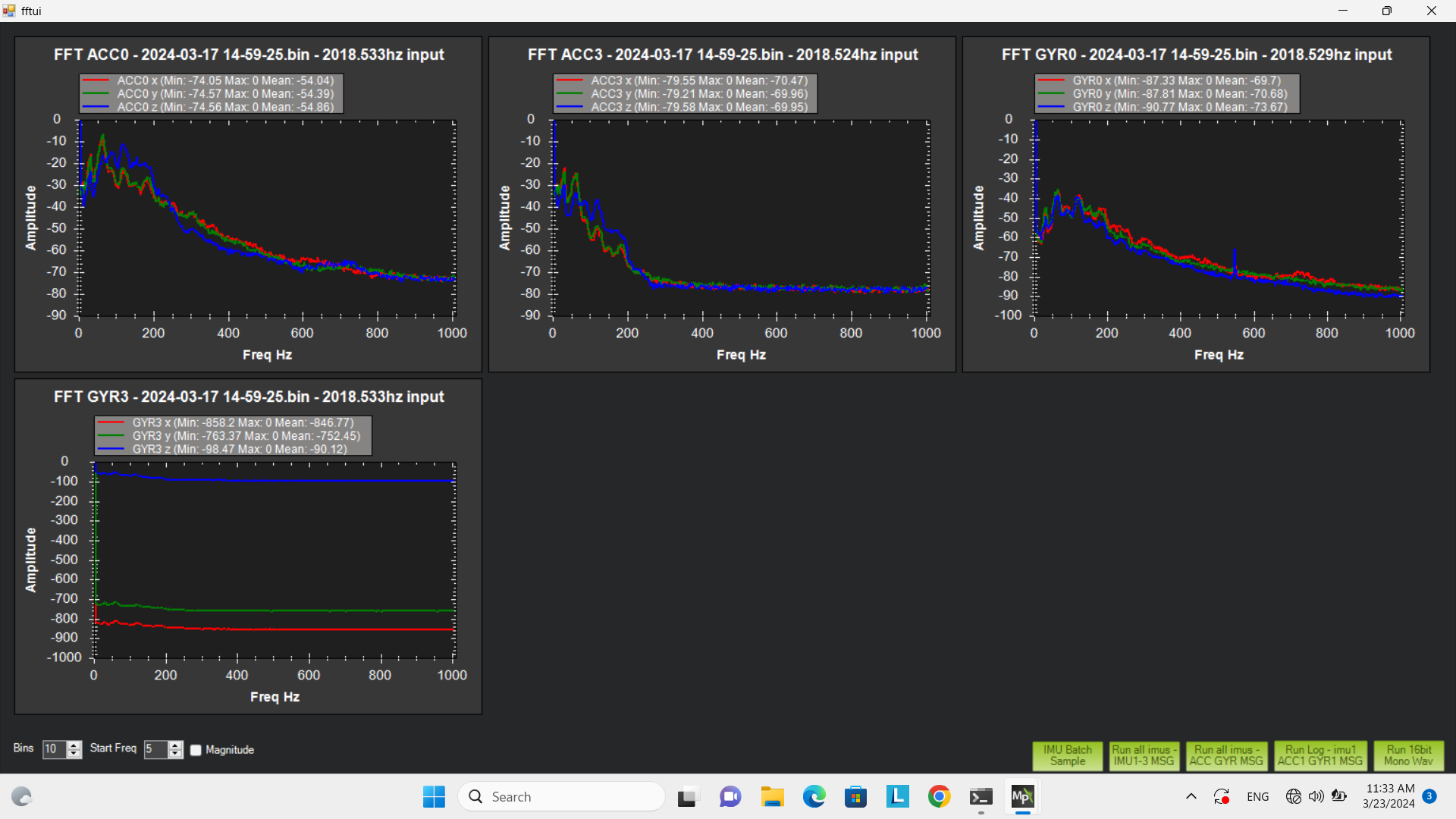
we stiffened the frame by changing payload carrier design. Vibration is reduced and EKF lane changing is not happened. But the vibration is still between 30 and 40 m/s/s. We tried to measure vibration by using IMU batch sampling data. Z direction amplitude in FFT GYR3 graph isn’t lowered enough after filtering.
Do we need to change gyro filter frequency from 20Hz to 60Hz. Please, help us interpret the data.
Here is the data flash log file
https://drive.google.com/file/d/14M8HdHXPABjrHGMpi6akZabl0FzbEbrD/view?usp=drivesdk
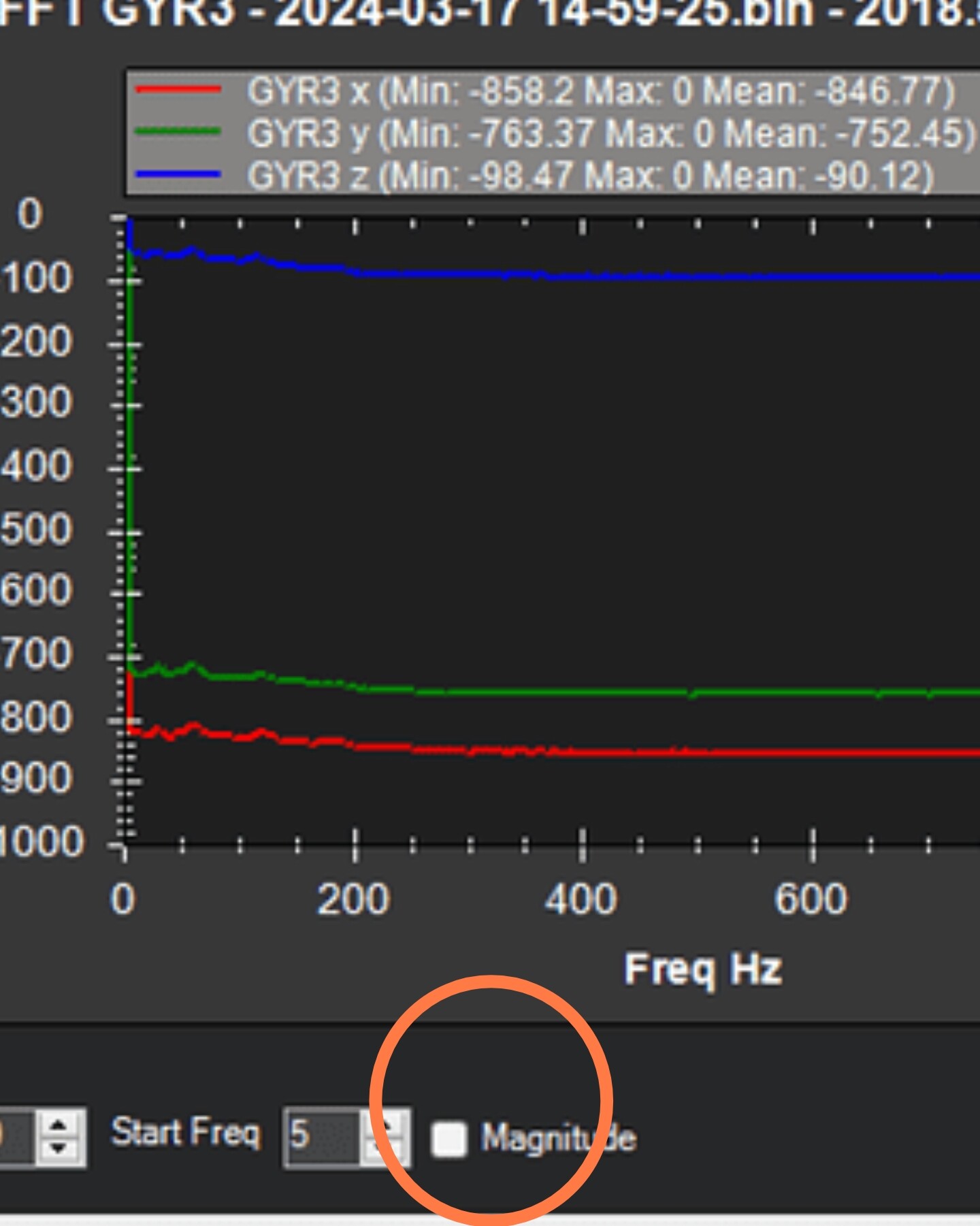
Check the magnitude when you load it. It is for noise. To configure the Harmonic Notch filter. Follow the guide section 3.1. Use the log viewer to check the vibe.n value. More explanation towards z vibration potential source. One of a few solutions.
2 Likes