Hi, I have been facing a weird issue of in-flight yaw alignment complete
I was flying in an open field in the middle of sugarcane field. Most of the flight were fine, copter was stable and easy to control.
Here are the log: https://drive.google.com/file/d/1BGRiShIKKZpbkwUXZjrC76x-eWi8wahJ/view?usp=sharing
First failed flight (Bad flight), this one has Data log, Telemetry log, and video here: https://youtu.be/tIEBXqtQvi0
I armed and took off the copter in Loiter as usual(GPS sat count and HDOP were fine). After it took off for a few meter, I pushed the copter forward. It goes forward for a few meter. Then, Mission Planner says: in flight yaw alignment complete. The copter LED blinks orange-blue. Then, the copter make a hard roll to the right without my command. After I notice that I cannot control my copter in Loiter, I switched to ALT HOLD at about 0.09 in the video. I was able to stop the roll, but it’s still feel very hard to control. I managed to take the copter back and landed safely.
Second successful flight (Good flight), this one has Data log.
Then, after the problematic flight. I rebooted the copter and checked that everything is fine GPS, HDOP, Altitude. I tried arming and took off again. Everything was fine. The flight was smooth and easy to control.
Third failed flight (Worse flight), this one has Data log, and Telemetry log.
I changed the location to fly the drone, it is still an open area in a middle of a sugarcane field. I prepared the drone as usual. Plugged-in, booted, and check the status from the Mission Planner and everything looks fine. I armed and took off. I pushed the copter up for a few meter and pushed it forward. Then, it went heywire. Mission Planner starts to sends out a lot of error, horizontal position, compass, terrain EKF Fail. The copter makes a hard roll to the left. I changed the mode to ALT HOLD and tried to regain control. But the copter starts to yaw like crazy. MP tells me that the copter changes EKF frequently during this chaotic moment. The copter was nearly uncontrollable. I wrestle with it for a minute and finally landed it safely.
All flight uses 1 compass: external one. I checked the vibration and it looks fine. GPS on every flight were fine.
The copter has a LIDAR installed for terrain following.
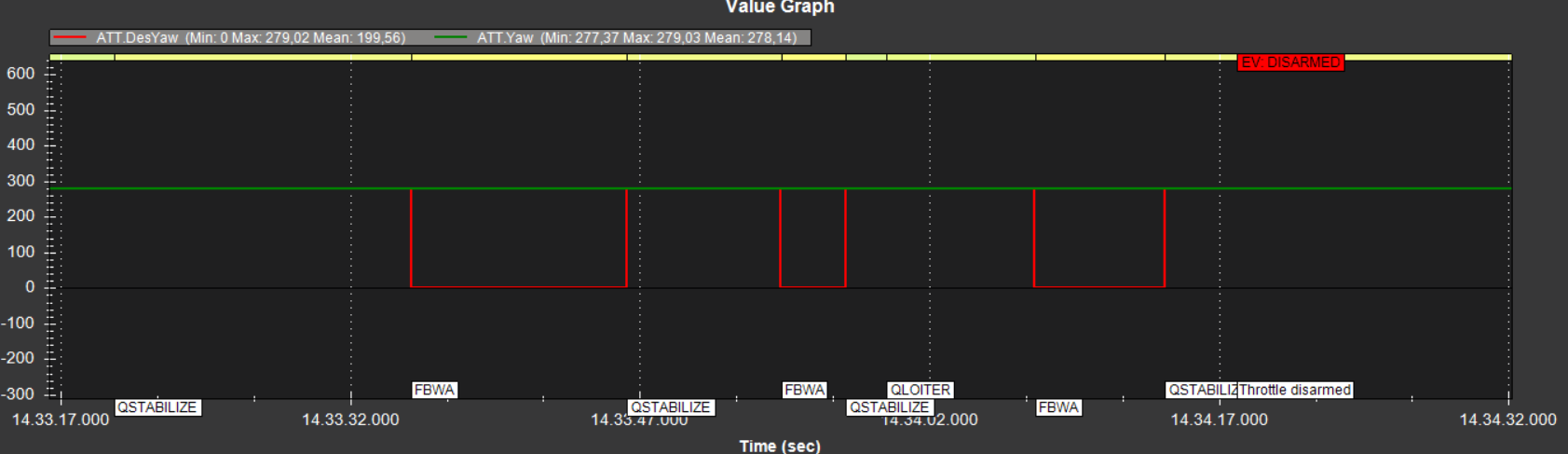
I looked at the log from both problematic flight, both has a problem with heading since boot up. The heading was incorrect and it was off by nearly a hundred degree. (You can see this in the video of flight 1 that the heading that I took off was not the same as in mission planner telemetry log.) Compass and Yaw (from log) was not giving the same value.
Have anyone experience this EKF IMU in-flight yaw alignment complete problem? Has anyone crashed with this error? What am I dealing with?