Hi @losawing , thank you so much for looking into this and very precious advices!
Yes, thanks to your help and other veterans help, it is flying much better, getting more confident to fly under windy condition. I am already printing and building, will be flying soon. It will be 11th build and always new.
Larger prop is interesting. Yes plane should have enough gap to fit 10 inch. I may have that in my stock, or have other 10 inches a lot for sure. Did not have chance to try non Slowfly prop, should try higher pitch prop as SF prop does not work well as a plane.
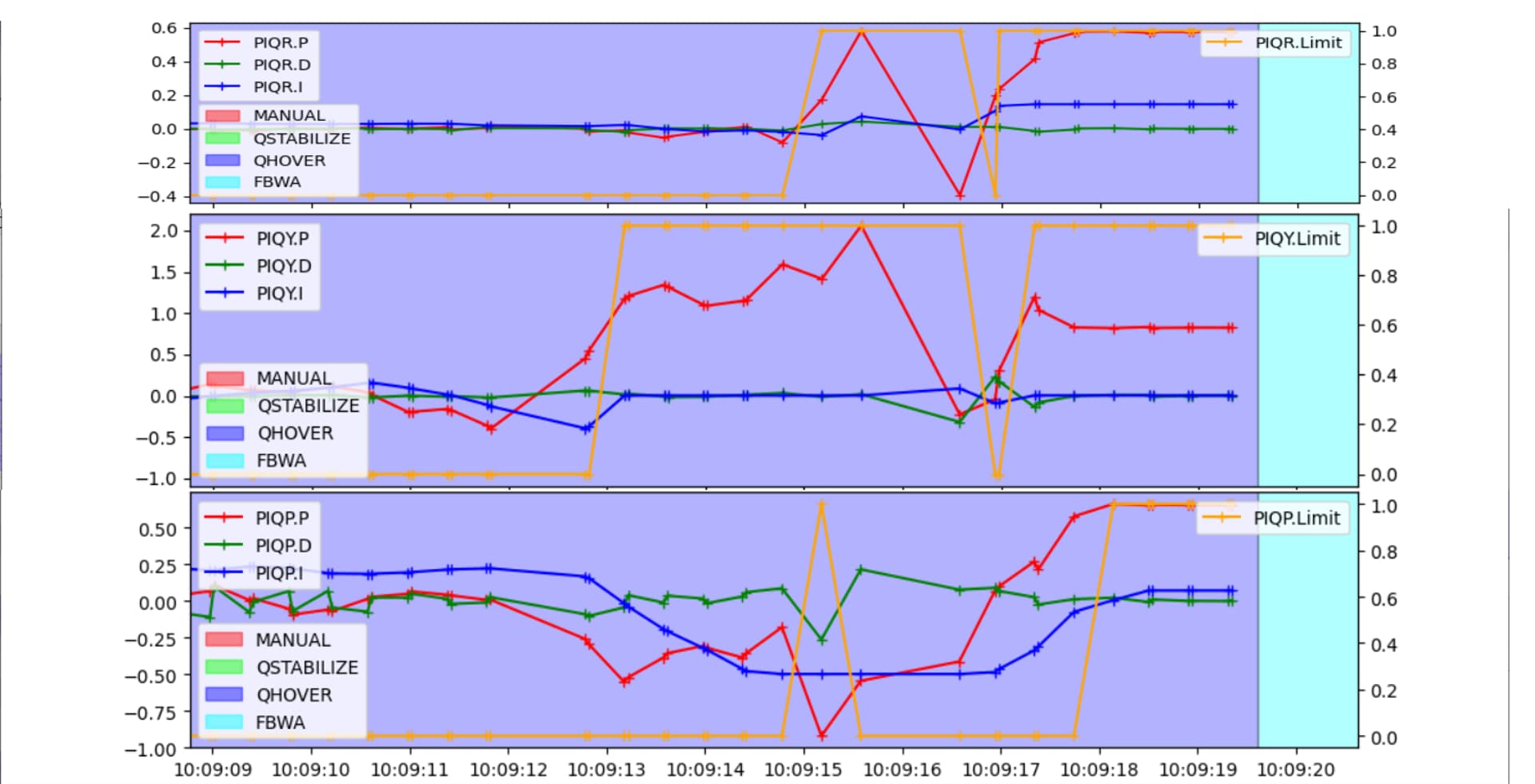
Thank you for looking into the incident as well. Looking at related in detail, Roll, Yaw axis was saturated (PIQR.Limit = 1). Yes, it does not look like RC input is causing this.
I will fix q_tailsit_rll_mx, and try similar maneuver at altitude.
Had a chance to run VTOL Quicktune lua script, successfully.
It finished tuning in less than 2 minutes with good result.
Plane is config #3, Matek H743 Wing FC, fast KST DS215MG V3.0 servo. I took so long time to tune this. This script saves 10s of tuning flights, so happy. This plane was already manually tuned to certain level, so tune from default may take longer time but impressed it dealt with this fast servo well.
Video shows log messages to see the progress. Tuning progress message with parameter value, slew rate is displayed. When I tried the script on SITL with modified CAT tailsitter (I made it heavier), it lost attitude at yaw tuning, but this flight was eventless, no visible attitude change. Log of this flight
Hey! I’m just coming back to all this after some major life events happened this past year. How’s the plane flying? Any major updates in the last few months?
Hi good to see you here again! The E VTOL is flying great.
Have not posted this here yet. This build #11 with 2M PixRacer FC. It is stable after limiting q_tailsit_rll_mx to 40. This video contains 2 hops. 1st with maneuvers in QHOVER, then transitions in next hop.
Log of this flight is here
Fun to fly, but FC lacks memory to run LUA. Should focus on H7 FCs.
My mistake I printed this wing with gray color LW PLA, which collects sunlight heat. Need extreme caution in this season. (10 minutes direct sunlight, wing surface deforms…) I rebuilt 2M FC one as no dihedral layout and tuning as build #12. 10 inch prop next.
Your advice helped a lot to limit q_tailsit_rll_mx to 40, it can fly at high lean angle at q_angle_max = 8000 without issue. Need caution to control not to sideslip.
I set same parameter to other config build (Matek H743 Wing, fast KST-DS215MG servo one) and it also flew stable as you see the video.
For smoother transition, I set lim_pitch_max to 60, pull up manually a lot before transition to hover. To transition to FBWA, lean pitch down a lot before kicking transition. This plane is stable at high angle of attack and it helps a lot.
Unfortunately elevon horn was broken at the end and ended up with a dramatic crash… Building another now. Q_A_RAT_PIT_P is still high and can see elevon vibration, needed to adjust after quick tune.
Even if it crashed I would say that the tuning is very good, congratulations.
You could have definitely saved it by switching to QStabilize and cranking the throttle to maximum.
If it loses control in QHover with that max angle at 80 degrees it is normal that it may be in a difficult condition to recover being bound to a maintenance of height.
The derivative on the pitch is also too high, those vibrations on the elevons do not have to be there.
Thank you so much for encouraging comment! It is getting better!
Re-built another one, now 13th build. After checked it flies ok, I changed with larger prop. Good old GWS SF type plastic 10x4.5 (I have lots in stock.) from 8 inch. Looks like E VTOL has room to mount even 11 inch.
I was worried about charasteristic change. Instantly noticed elevons are working better. It started oscilate badly and needed to lower Q_A_RAT_PIT_P. Still need to adjust other parameters. Hovering throttle position also changes until it is tamed by Q_M_HOVER_LEARN.
Quick video of 10 inch short flight while adjusting params. Almost no wind condition and fun to fly time. Log is here.
I am reviving this topic since quite recently I started using the eclipson VTOL plane. I have performed some flights and have tried to tune it in QHOVER and QSTABILIZE mode.
My setup is:
Matek H743 Wing - V3.
Feetech STS3032 servos.
I use the LW-PLA version.
8x6 props.
Flying indoors for now so no GPS, no magnetometer. Just IMU and barometer measurements.
Following the Wiki docs about tuning a tailsitter, I started by configuring the Notch filter. Then I calculated the FeedForward gains for the Pitch and Yaw rate controllers as well as the Integral term of the PIDs, using this formula:
In this flight log I perform sharp pitch movements and yaw as well with the latest tune configuration. The plane is quite steady I think, however there are some points that confuse me and I would really appreciate your input.
First of all I d like to make sure what signals should I check when tuning the rate controllers. I compared the RATE.PDes (desired pitch rate) and RATE.P (actual pitch rate); similarly for yaw.
Given the above, I noticed a rather strange situation. Decreasing the P term, led to more overshoot. This is rather not logical. How is this explained? Could it be that the FF term is very large?
Q_A_RAT_PIT_D term was tuned to 0.1, according to the docs procedure. But I noticed that zeroing it did not change much. Should I choose 0 then?
Changing Q_A_RAT_YAW_D from 0 to max (0.02) did not have any noticeable effect on the output. Again, should I choose the smallest, ie 0?
Apart from the above it would really help if anyone had anything else to recommend in general for the tuning according to the flight log I provided above.
Hi @ntouev , I believe you requested modified files at YourTube. I placed them temprarily on GoogleDrive. (You need to request access when clicking this URL). This zip includes modified wing1 (in 3mf, I set 2 layer wall for strength to prevent vibration), and modified fus1,2 to move battery to the bottom.
Hi Satoru, yes that was me. This is great! Thanks a lot! If I understand correctly this is the left wing. I assume you apply some mirroring for the right, correct?
I am tuning this tailsitter and facing exactly the same problem as you did. In QHOVER Pitch up (backwards) is ok but pitch down (forward) causes the plane to pitch too much.
What was actually the issue? Was it the CG? Or tuning?
That caused me a crash which can be seen here 2024-06-03 17-34-38.bin - Google Drive so any input would be great! I was not fast enough to switch to QSTABILIZE to save it …
Good to hear progress! I do not recall my issue, let me read my posts again…
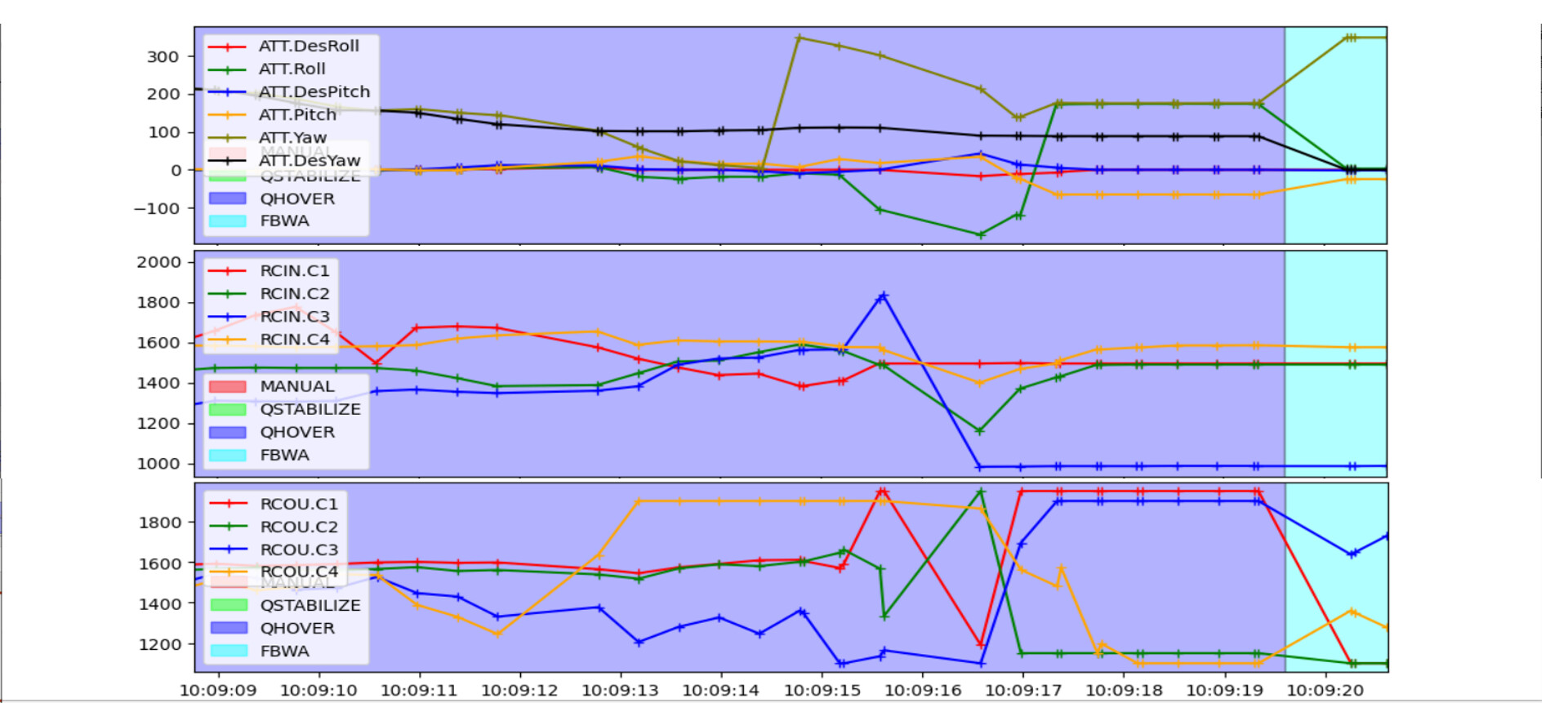
I see your RC Out 3 and 4 have maxed out, I presume they are elevons, they have deflected to the max and cannot control further, so cannot control roll enough then? I see you have exit to manual.
So if you can adjust linkage to deflect more, it should help. I usually test in QSTabilize and FBWA. QHover has indirect control from RC throttle ch to ESC, manual is a bit difficult to fly this VTOL (especially I got panicked with forced transition.)
Hi @Satoru_Sasaki, Thanks for the response and the insight!
indeed, the elevons saturated but as you said QHOVER can not do much since it has to control the altitude as well.
The problem is however, that I see difference when pitching down vs when I pitch up. Pitch up (going backwards) is ok but pitch down (going forward) overshoots a lot (50 degrees) and of course QHOVER can not recover.
I noticed you had this imbalance as well. Is it due to the non-symmetric airfoil?