Hi @esasujnr, thank you for sharing video. Looks good and stable. I see you are swinging the plane on pitch and recovering well. Different color, did you re-print or painted?
What servo do you use? My config #3’s KST speed is 0.06sec/60 deg at 6.0V on catalogue, I am thinking it is too fast.
I crashed #9 build no dihedral one last week as I set CG too far back, spiraled in plane transition. Rebuilt and flew today. Will post later.
I rebuilt everything with PLA because the LW-Pla to me wasn’t that strong for my beginner piloting skills. Transferred all electronics to my second build.
I used KST DS215MG V3.0 Digital Coreless Swashplate CNC Servo purchased from here
Thank you for sharing info. The same KST servo I use. Interesting it is not oscillating much in your build, probably my LW PLA build lacks rigidity. I will check.
This is 10th build, config #4, no dihedral wing. #9 build is crashed as I flew with foo far aft CG and spiraled when transitioned to plane. Careless mistake.
To increase rigidity of center wing 1, printed as 2 line walls from center to motor mount. Still printed with LW PLA. Came out with good strength. Weighs 56g vs 27g. Probably can have similar result printed with regular PLA.
Opened battery mount hole in the belly. Top/bottom CG looks good now while fuselage rigidity is ok.
Reused elevon parts. Replaced airspeed sensor, previously used 2 year old Happymodel one was too noisy…
Similar power system is flying light LW PLA printed, and PLA printed planes, they differ 200g+ in weight. So 120g is not an issue. You need to plan battery and camera placement to have correct CG. Do you want to carry full size Go Pro?
20/24MP Drone Mapping Camera for Drone Aerial Mapping & Surveying . I want to put that camera!!, What motors do You recommend for minimum 40 minutes pf flight with that camera?.
What do You think about sunnysky 2212kv880, and 10*6 propellers, and a battery lipo 5200 mah 4s?
Thanks. Serious stuff, 138g with lens. Probably a bit more with a protection case weight/mount etc. Payload may be too much with 5200mAh 4s lipo 450g (+200-250g from 2200mAh). E VTOL has only 1.1m wing span, 20dm2 wing area…
I would not seek this plane or non vectored dual motor tailsitter option for that use case. If you are comfortable to load them on 2.6m foamy glider (ASW28 wing area 35dm2), I think it is better. See below.
Eclipson E VTOL does not have camera hole facing to the bottom. You need to design/modify fuselage.
Beware current Arduplane tailsitter is still need improvements, not suited for full autonomous operation yet. Most notably it cannot land well other than manually in QStabilize mode. Also very weak against wind compared to other type of VTOL. Will end up low utilization rate with need of experienced pilot operation. Better to check other type of VTOL. Or regular plane if you can afford space to land.
I would like to hear others thought. This E VTOL is compact and easiest to build, more suited for fun staff, tailsitter learning and hobby FPV use.
I want this drone, but I don’t find the frame to build it, however I found a 3d file in 3dsmax, but It has copyright, can I unlock this copyright???, Do You know about it?, This is the link of the 3d file.
What option do You recommend, one motor, two motor vtailsitter, or four motor, i think one motor is more time of flight with less Money, like ebee sensefly drone.
3d printed planes are good for quick build and experimental development, but not suited for workhorse type of usage. It is less venerable to damage, sun light heat etc.
Link you gave is a user designed CAD file, not 3d printable STL file.
Those commercial drones have more than frame/prop/camera.
Config #4 no dihedral build is flying good. Tried in a bit windy condition at 2-3m/s (from left at takeoff scene in the video). It flew ok as far as I keep wingtip pointed to the wind (a little to the plane back side). I wonder upcoming windvaning can control this subtle direction change.
Yaw control holds direction ok. Elevon has not saturated other than I moved plane sideways fastest. Started auto mission as well.
Congratulations, that’s flying really well!
Have you tried bodyframe-roll input mode?
It’s Q_TAILSIT_INPUT bit 1, so you would set it to 3 for bodyframe-roll plus plane controls.
Thank you @kd0aij or your encouraging word! Very happy to hear.
I have only tried that on SITL+RF9.5, yes it made plane control easier at high (low) pitch angle. I will try on real plane.
Had another chance to fly in calm condition. Can fly sideways fast , even in circle as far as I face back a little to the wind. It does lose attitude angle is incorrect. Should consider to increase elevon size or else.
Trying high lean pitch angle in hover. Set Q_ANGLE_MAX=70, Q_TAILSIT_INPUT=3 (roll by bodyframe). Unfortunately elevon oscillates at higher lean angle, needed to limit pitch angle. Thought it may be elevon movement saturation but symptom (PIQP.Limit=1) does not match oscillation in the video. Think need further tuning tweak. Wish I can fly this beautifully like losawing’s, but miles away…
Maneuvers are mostly rudder turn, even applying reverse aileron.
It is 4.2.0, log is here. https://youtu.be/VrInmB7KWAA
To stop oscillations at high lean angle is just a question of tuning gain attenuation. The disk theory gain attenuation gives beautiful resut You may have to reduce (a lot) the disk load parameter and/or the min scale parameter.
Yes, rudder stick is the main command. The roll stick has to be applied in reverse direction (roll stick right to face left like a 3D plane when prop hanged) at low lean angle and in the same direction than the rudder stick at high lean angle (when the tailsitter begin to fly like a plane), This is very logical but need to be used with. You can imagine that when flying inverted this is even more compicate.
Hi @losawing, thank you so much for advice! I tried in SITL+RF and working great, can’t wait to try on real one.
Thank you also for controlling advice. Yes, inverted looks a bit confusing. I can do inverted rudder turn in 3D plane somehow, but elevator stick pressure is opposite in VTOL plane so need practice at altitude for sure.
Tried with lower Q_TAILSIT_DSKLD and improved. Lowered DSKLD to 5 down from 10, then 4. Unfortunately lost attitude and crashed bad, rebuilding another one.
Separately started to try Quick VTOL Tune LUA script on config #3 which has KST servo and H743 FC. Script worked nice on SITL+RF. Verified script started ok in the air but damaged the plane during setting adjustment. Will continue. It will be tremendous help in tuning.
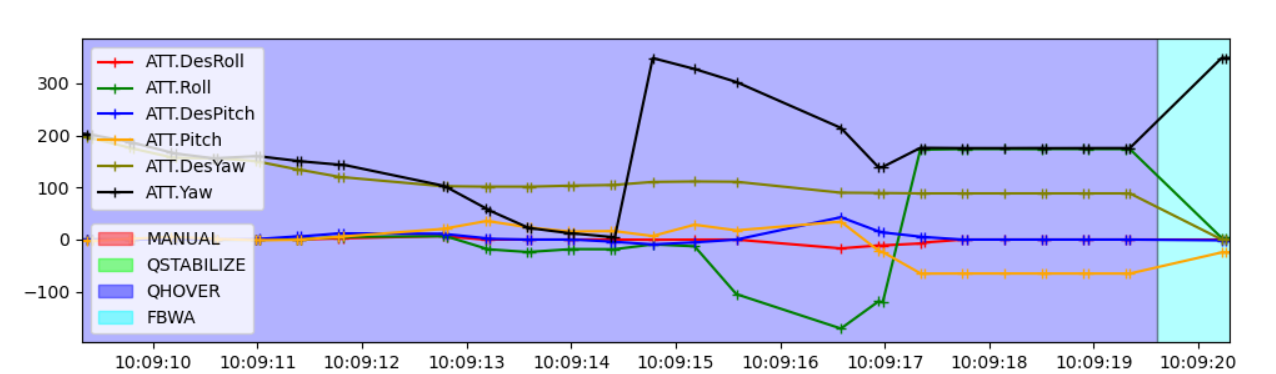
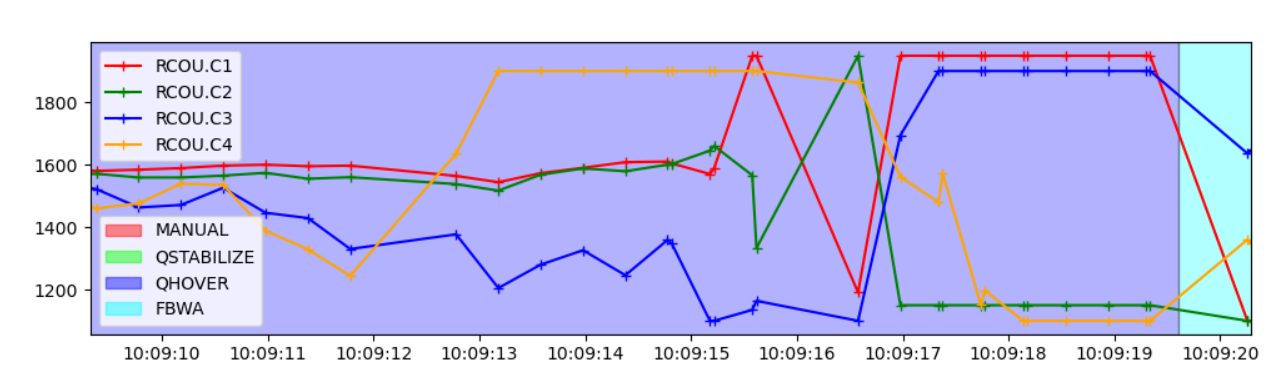
Config #3 high lean pitch flight with lower Q_TAILSIT_DSKLD
Log is here
Attitude is lost during elevon saturated. Plane is yawing with C4 then C3 maxed, then left motor C1 kicked in, then C2. Too low to recover.
Not sure the exact cause, at least this plane’s envelop is still tight with smaller elevon. Also I think side slipping during turn can lead to this critical situation. Need to practice well, it is getting similar to 3D flying…
hi Satoru,
So much progresses since the beginning, the Eclipson VTOL is now flying pretty well.
About the crash, 1s before the plane hit the ground you had the belly of the plane in front of you and from the log you pushed yaw stick left (rcinC4 lower PWM if I am correct) so the plane rolled left as it should but relative to you it produced a right roll.
edit: when looking at stick position (overlay top left in the video) the left stick order only occur after the crash !! is it a overlay synchronization problem or my log analysis is wrong ?
About gain attenuation, maybe you will get less control surface oscillation by reducing q_tailsit_gsc_min, only tests will tell us.
To improve control, it would be interesting to test larger prop. This is something I never tested. Relative to the E-VTOL wing span, 10 inches propellers seems correct and you motors can spin them on 3s easily. From my side I dont like slow fly prop, I use this kind CW/CCW, they are more efficient, draw less amp and are very light.
They are not as good as Graupner genuine ones but good enough for tests.
Edit 2: @Satoru_Sasaki you do not use q_tailsit_rll_mx parameter so your tailsitter is allowed to roll up to angle_max and 70° is way too much. This is very likely why you crashed your plane. I suggest 40° for q_tailsit_rll_mx , 50° is an absolute max.