Had calm wind weekend, tuning went fine.
Tried to lower P, D further on yaw and pitch while keeping maneuverability. Pitch is ok but yaw stability needs improvement for better wind resistance. Value is as below at the end of this flight.
Q_A_RAT_YAW_D 0.003000
Q_A_RAT_YAW_FF 0.100000
Q_A_RAT_YAW_I 1.000000
Q_A_RAT_YAW_P 0.450000
Q_A_RAT_PIT_D 0.000600
Q_A_RAT_PIT_FF 0.050000
Q_A_RAT_PIT_I 0.800000
Q_A_RAT_PIT_P 0.160000
Changed values are in subtitle. Log is here.
I have frequent imbalanced throttle in plane to hover transition. Saw discussion on this at discord, should try the fix.
I had a chance to take onboard video. Loaded Insta360 GO2, video is processed without stabilization. Wing frame rigidity looks ok, inner wing is reinforced with Japan paper and water based polyurethane covering. I have overlayed log plotter playback but plane yaw is 90 degree off, I do not know why…
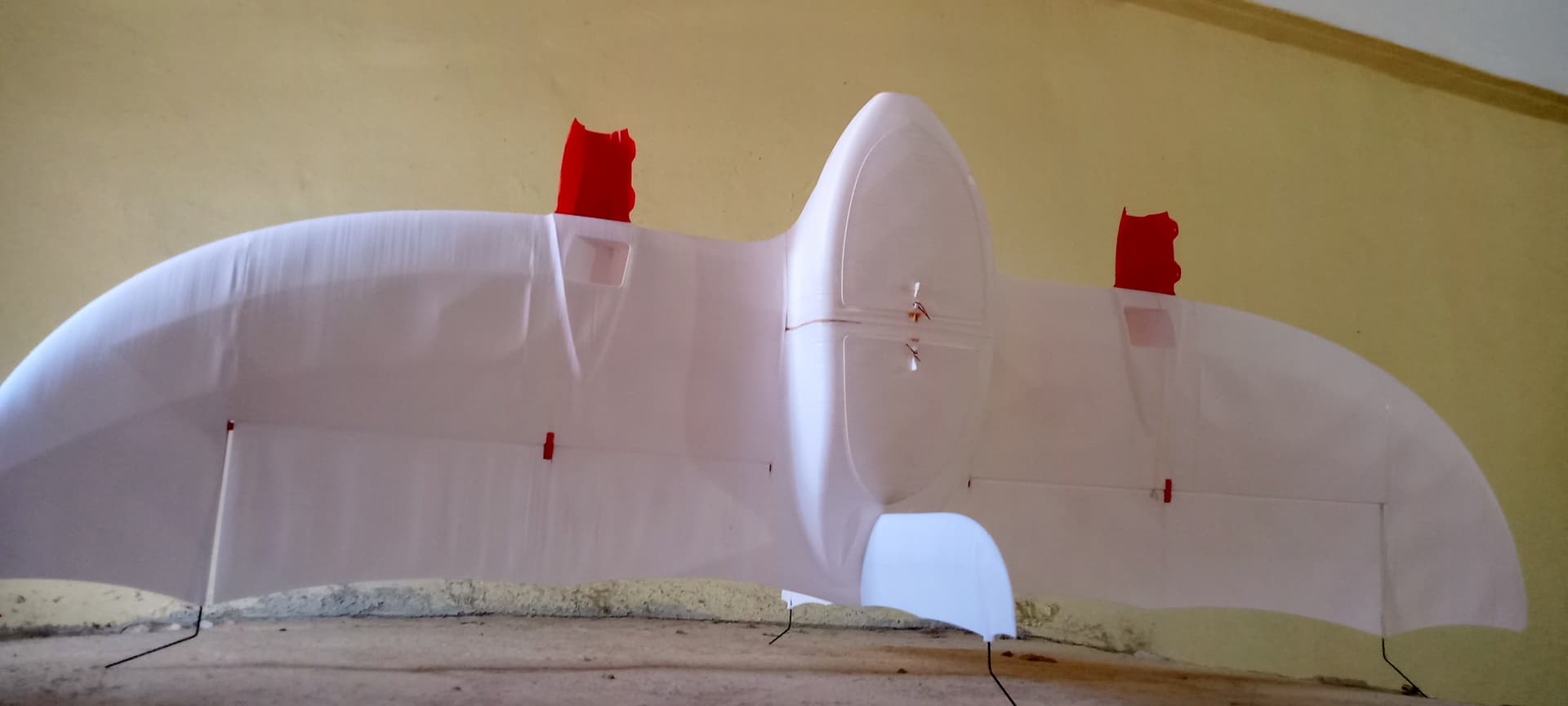
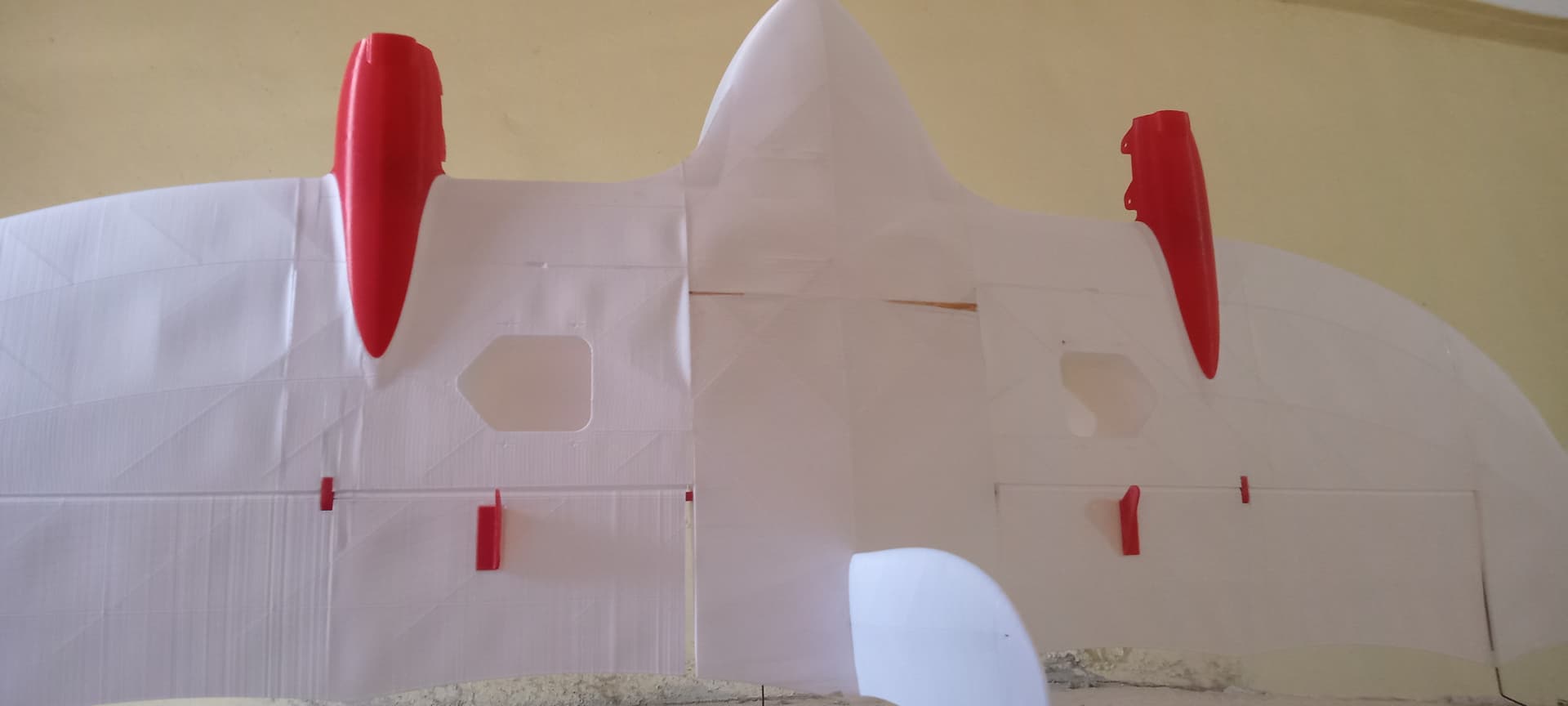
Built another configuration of E VTOL. I wanted to improve side movement performance, thinking what can be done. E VTOL design has about 5 degree of dihedral and I feel it is inducing unwanted yaw, preventing fast side movement. So modified STL, read into Fusion 360, arranged fuselage and wing1, filled gap with loft. No dihedral.
Dismantled config #1 (which kitten has damaged anyway…), transferred FC etc. For servo, picked up a bit better digital one EMax ES08D (1.6kg/cm 0.12sec/60 deg) instead of ES08A. This should have enough power with a bit faster speed.
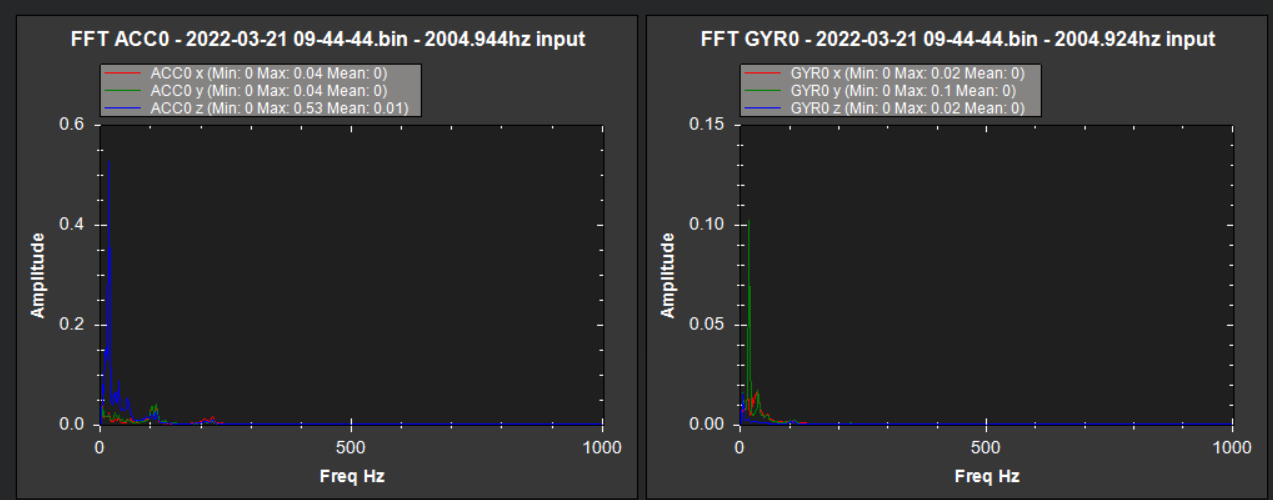
Initial flight looks good. I still need to lower pitch and yaw P, D as log shows it vibrates at SRate of 2-10.
It is around 1m/s wind from right of screen. I do not need to face top of the plane to wind anymore. I see elevon moves differently than before. This layout is ‘top’ heavy as battery is on top of wing. I need to relocate it under the plane I think.
That’s great. With no dihedral sidewards movement improves. However, roll stability in transition flight would reduce since no dihedral. On your transition to fixed wing flight we can tell the difference.
Since the intention for VTOL is primarily for landing and takeoff and has proved less efficient in copter mode, I think the designer prioritized very stable forward flight and less maneuvering in vertical mode, hence the introduction of the dihedral. However it’s great to see this variant
Yes, I will find after hovering is tuned. Hoping FWBA will help on roll stabilization. Yes, Eclipson designer has spent energy to design stable plane like his other design.
I will also modify my wing and remove dihedral. Afterwards I’ll modify the fuselage portion where battery will be placed so that thrust line during hover will coincide with cg (as battery will be a little below wing) and eliminate the ‘top’ heavy you experienced.
Let me know the performance of servo after tuning. Currently I’m planning to use the faster servos you used on the #3
Got another tuning chance today. It was hot spring day at 26 deg C, too hot to concentrate…
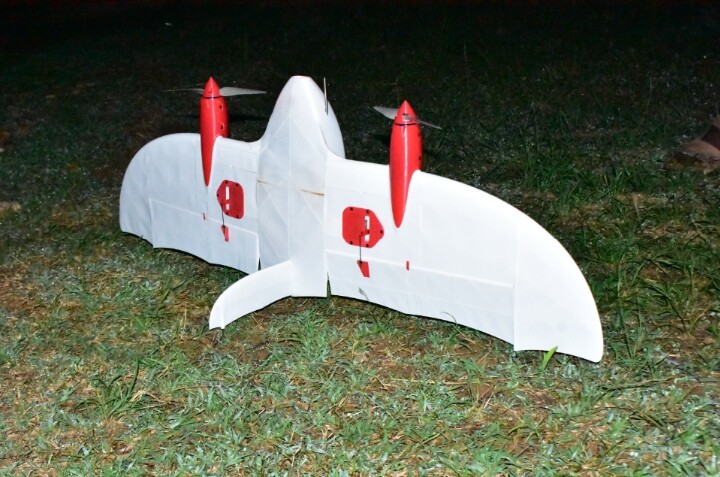
Config #4 with no dihedral, move battery to the belly, found bottom heavy. Loaded a dummy 1500mAh battery and tried to balance. As this wing has non symmetrical airfoil, looks like neutral CG alone will not balance. I see pitch I term is busy. Video of one flight, tuning movement in QHover, one transition and QLoiter. Feels better.
Great work. I’m always happy to watch your test flight videos. I’m learning every detail here in Ghana. I’m done printing. All electronics have arrived except the flight controller. Once it arrives I will also start the interesting journey with you, brother
I noticed after printing that the surface feels a little bumpy because the skin is very light. Does it have any effect on the flight performance? as I think airflow will be disturbed while flowing over the wing. I can see that on yours too
Also I’m planning to reinforce the printed airframe with a layer of fiberglass as done in this video Fiberglassing a EPO foam RC plane - YouTube. I’m thinking that could make it a little stronger. Please Kindly let me know your thoughts on this @Satoru_Sasaki
Looks good! Yes, when printed with LW PLA, surface can be wavy. Can be solved by increasing flow a bit (to 60% etc). Yes, I do reinforce using similar method as micro glass. I use Japan tissue paper and water based water based polyurethane (WBPU) thinned with water. Also good to repair crack or broken piece together.
Since LW PLA is foamed, it sticks well to resin or WBPU.
Check here transition section for detail.
ArduPlane tailsitter transition is simple. If you use 4.1x these parameters only, only these parameters. 4.2 has more parameter to control throttle. 4.3dev has more. Q_TAILSIT_ANGLE Q_TAILSIT_RAT_FW
From hover to plane mode, AP will rotate head down to Q_TAILSIT_ANGLE at the rate of Q_TAILSIT_RAT_FW. See my doc and parameter as well for detail and examples.
Transition to plane (recommend to transition to FBWA) is easy. Risky timing is transitioning back to VTOL. With not well tuned plane, it will fail to keep hover after transition.
See such example (trying to make transition with not well tuned plane in windy condition) in this video. I tried transition multiple times but plane was not able to keep hovering position, till I decided to crash land.
I have seen another failure to transition back to hover at Facebook.
Check plane is tuned well to hover
Swing the plane back and force to pitch direction, check it can recover well
Avoid windy condition
Make transition at good altitude to recover until you get confidence.
Better to slow down the plane well before making transition.
@Satoru_Sasaki , I used the faster servos for my build and they do not oscillate like it did on your #3. There is something that needs to corrected on the #3 I guess.
I’m trying to share the video of my test flight with you