I’ve seen the same recommendation here and also ordered a set of DS215MGs with dedicated servo frame and alu arm. The retractable strut for belly landings also looks promising, so I can’t wait to try that. My plane is to find a decent PID tune in hover flight on a calm day before i switch to forward flight and then use Autotune for good PIDs in this flight mode. This should give the next back transition a better chance and if it doesn’t work I can hopefully try a belly landing.


2 Likes
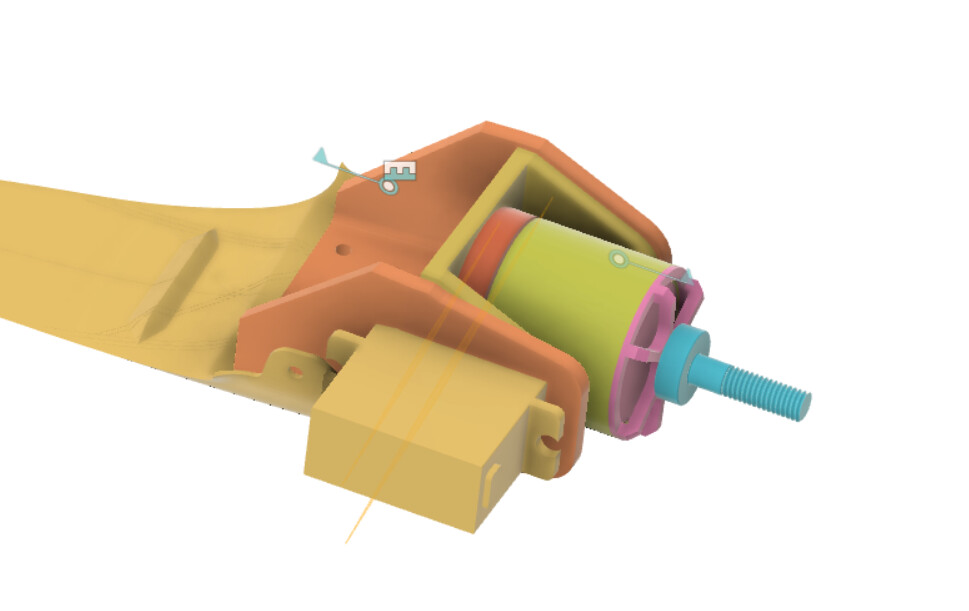
Wow, very very nice. I did not understand it was retractable.
I could not fly this weekend due to bad weather, looked into parameters comparing the one @losawing has shared. also went through Quadplane tuning guide process page. Set neglected FLT* filter settings etc, hope that gives improvement.
1 Like
While weather is not good to fly outside, I am working on PID tune with gimbal indoor. Looks not good plane wing tends to vibrate/resonate a lot even at low P, D, looks like whole LW PLA airframe is not rigid enough for this strong servo. I reinforced around inner wing and try again. (Used Japan paper and thinned WBPU, works very well on LW PLA) If this does not work, will rebuilt fuse and wing1 with PLA like @3dcadfreak did, parts already printed.

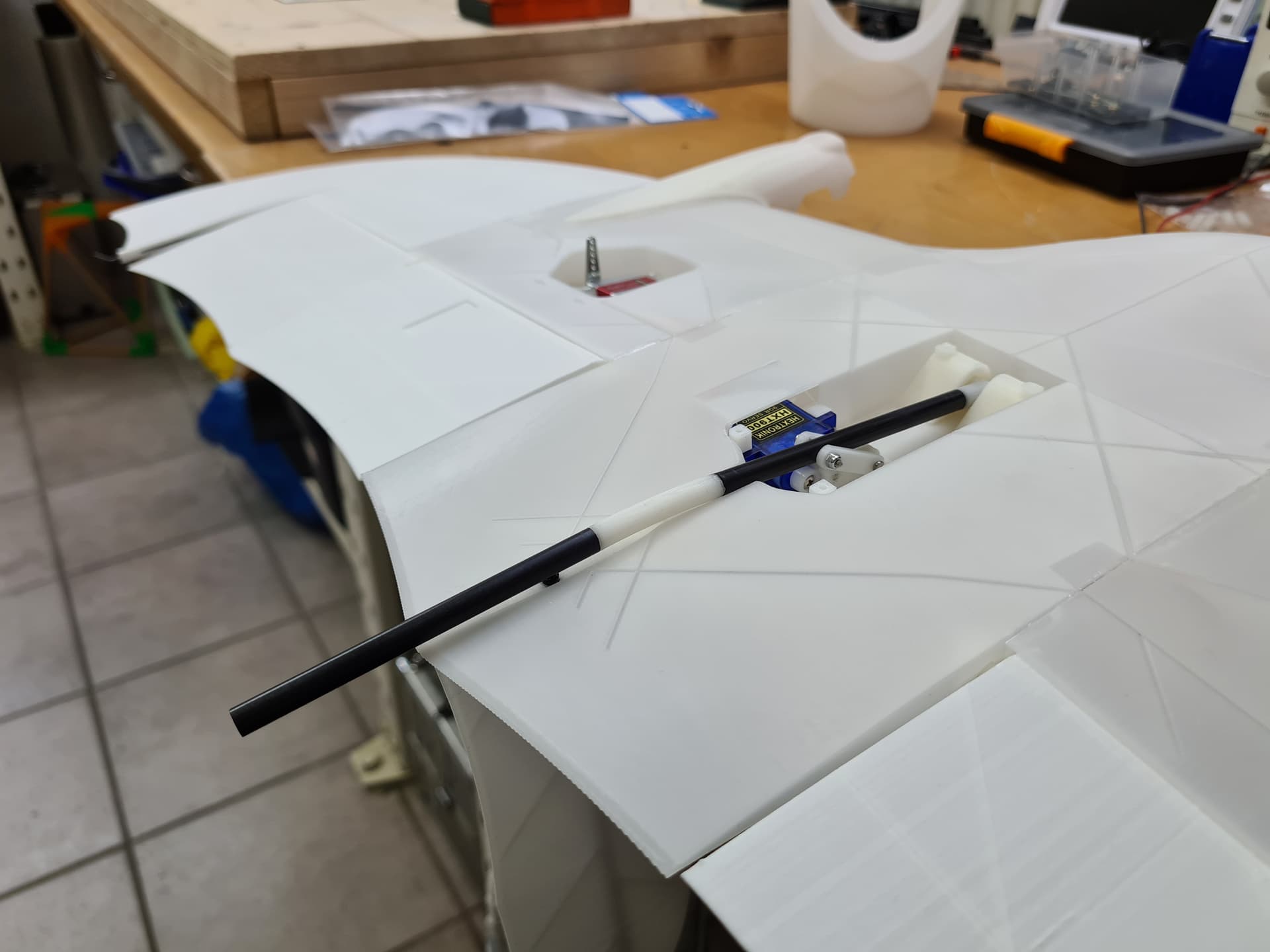
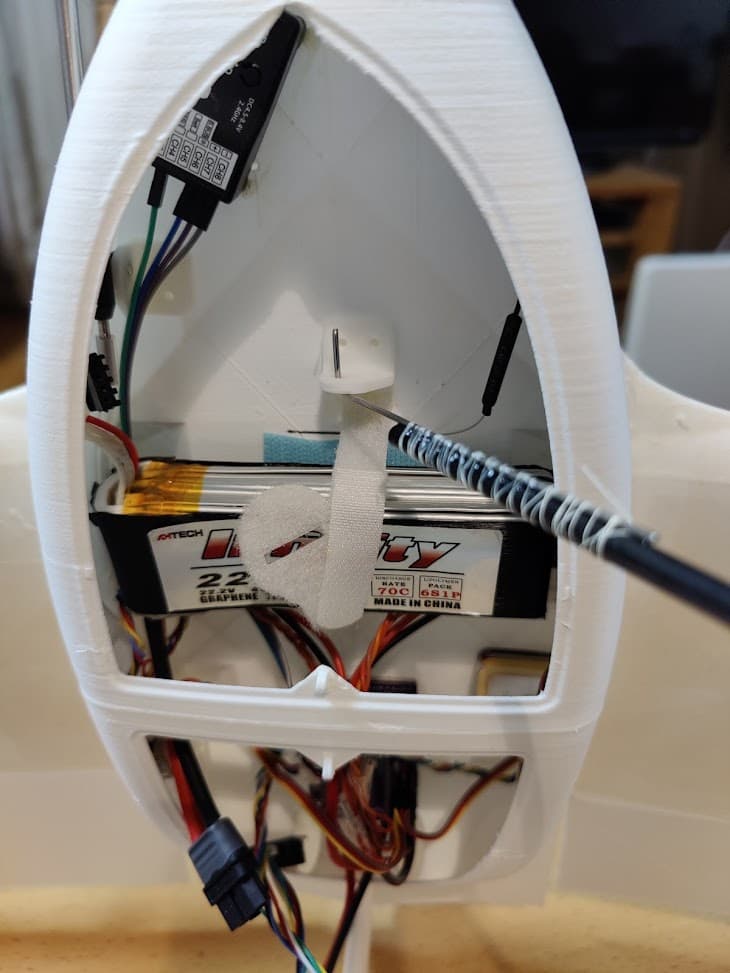
can you please post a picture of your gimbal setup for testing hover PIDs? I would like to try something, like this myself as the weather in austria seems to be similar to the weather in Japan
Very simple 1m 5mm carbon pipe and ~2mm steel wire hook. Use ‘Pitot tube holder’ part, glue aligning hole to center line. I am holding the pipe together with Tx. It will help the plane not to runaway.
Posted before but video how I use it.

1 Like
Working on tuning indoor. Having tough time to raise P, D on both yaw and pitch. Learning how to use PIQx graphs. Note these are indoor, no GPS fix.
After reinforced the wing (~20g increase), gets a bit better but still cannot raise P, D much. Servo keep vibrating, too fast?
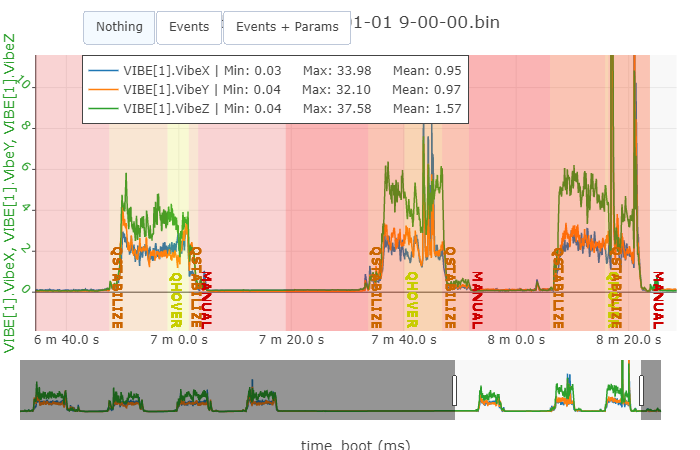
Suspected vibration but vibe graph looks ok? (Bump at the end is rough landing).
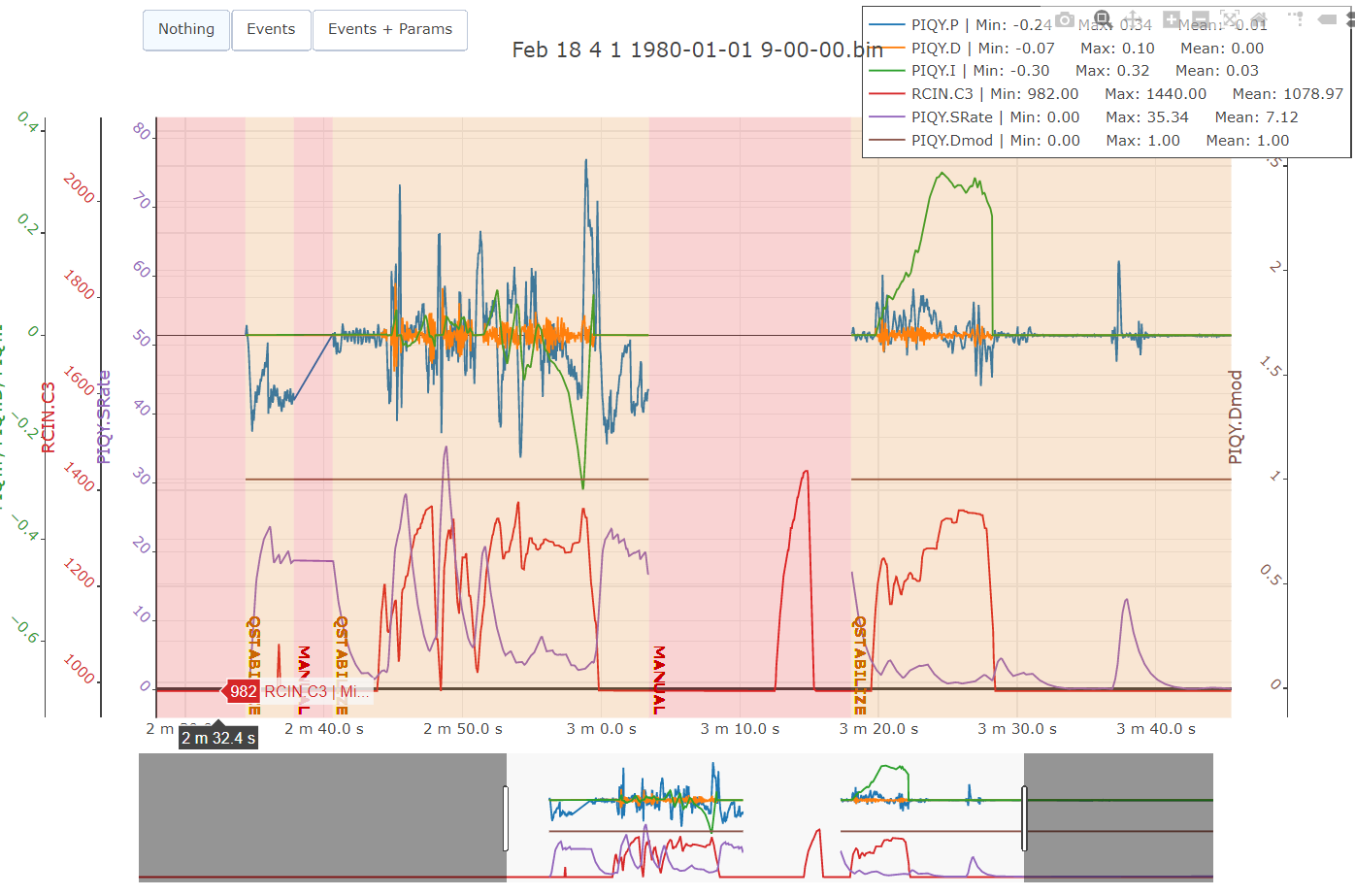
Tuning yaw first, this is Q_A_RAT_YAW_P 0.45, D 0.006, I 1, FF 0.1. Looks like P is still vibrating, D a little? SRate is between 5-25, Dmod always 1. For this fast servo, can I forget Dmod and what SRate is acceptable? Will this fly with this low P and D?
Log
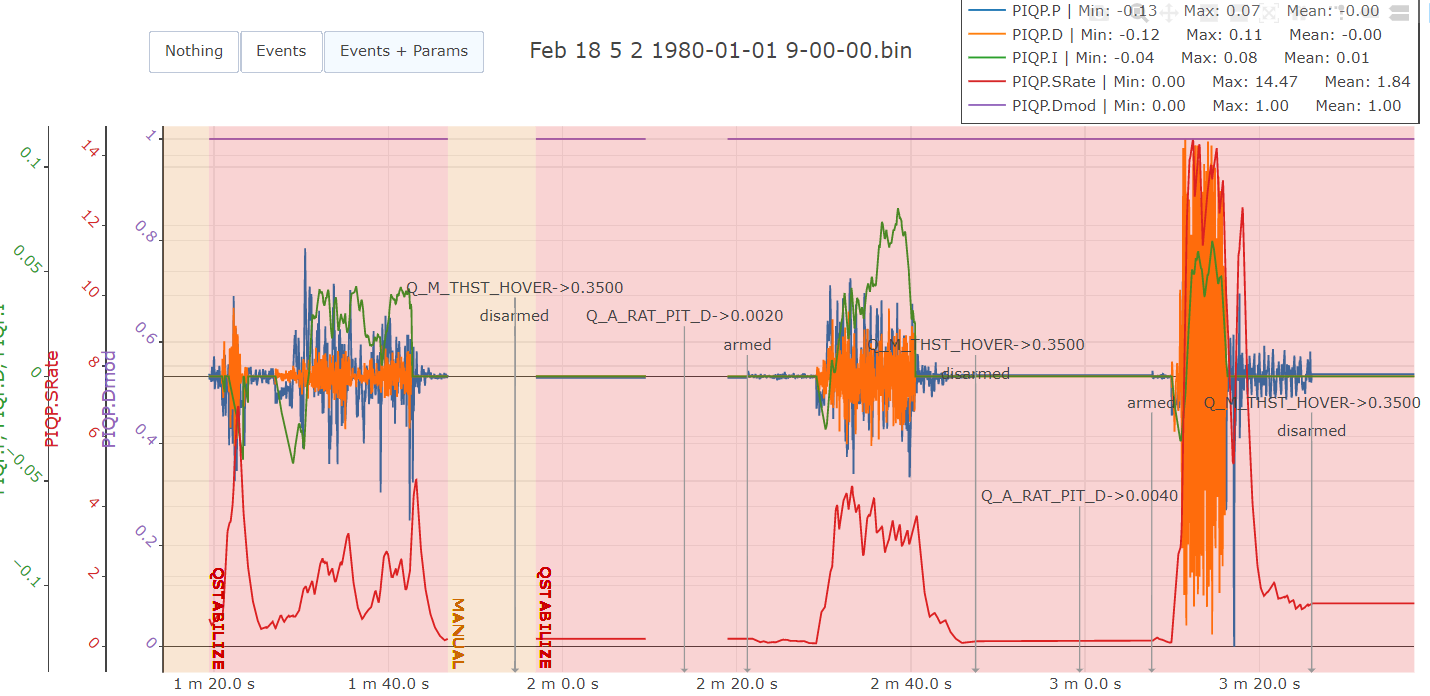
This is pitch tuning. Raised D from 0.001 to 0.002 then 0.004. Guess 0.004 is too high. P is 0.1.
Log
This is indoor short hop. I may be able to try outside this weekend.
Had a chance to fly outside in calm condition today. Tuning time.
After short indoor hop tunings, config #3 (DS215MG servo) was flyable at that low P, D. Will continue to tune further.
Tried to move CG back on config #1. Added ~20g weight on the tail and CG is now 5-10mm behind the mark. Good I can raise pitch and yaw P and D, plane mode was flyable so far.
| Q_A_RAT_PIT_D | 0.02 | ← | 0.0013 | |
|---|---|---|---|---|
| Q_A_RAT_PIT_FF | 0.3 | ← | 0.2 | |
| Q_A_RAT_PIT_P | 0.3 | ← | 0.2 | |
| Q_A_RAT_YAW_D | 0.01 | ← | 0.007 | |
| Q_A_RAT_YAW_P | 0.65 | ← | 0.62 |
It was slow or difficult to recover after horizontal move forward. Now it can recover better. Side direction move has limitation. Looks like it elevon saturated and lose attitude, need to concentrate direction slightly face upper side to up wind. Understandable this plane has dihedral and not the strongest to fly sideways.
This graph is part of next video, horizontal moves after short transition flight. PIQP looks good, not oscillating,
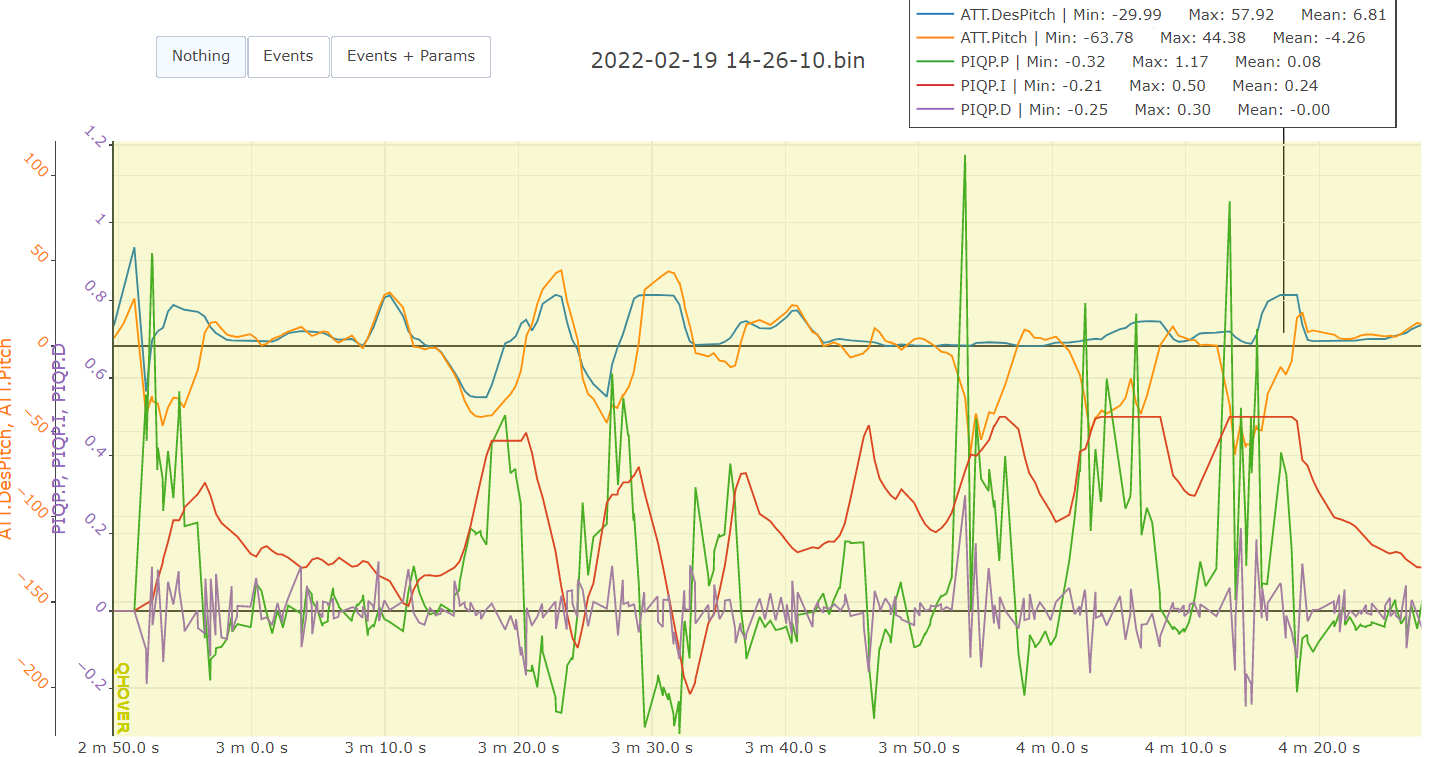
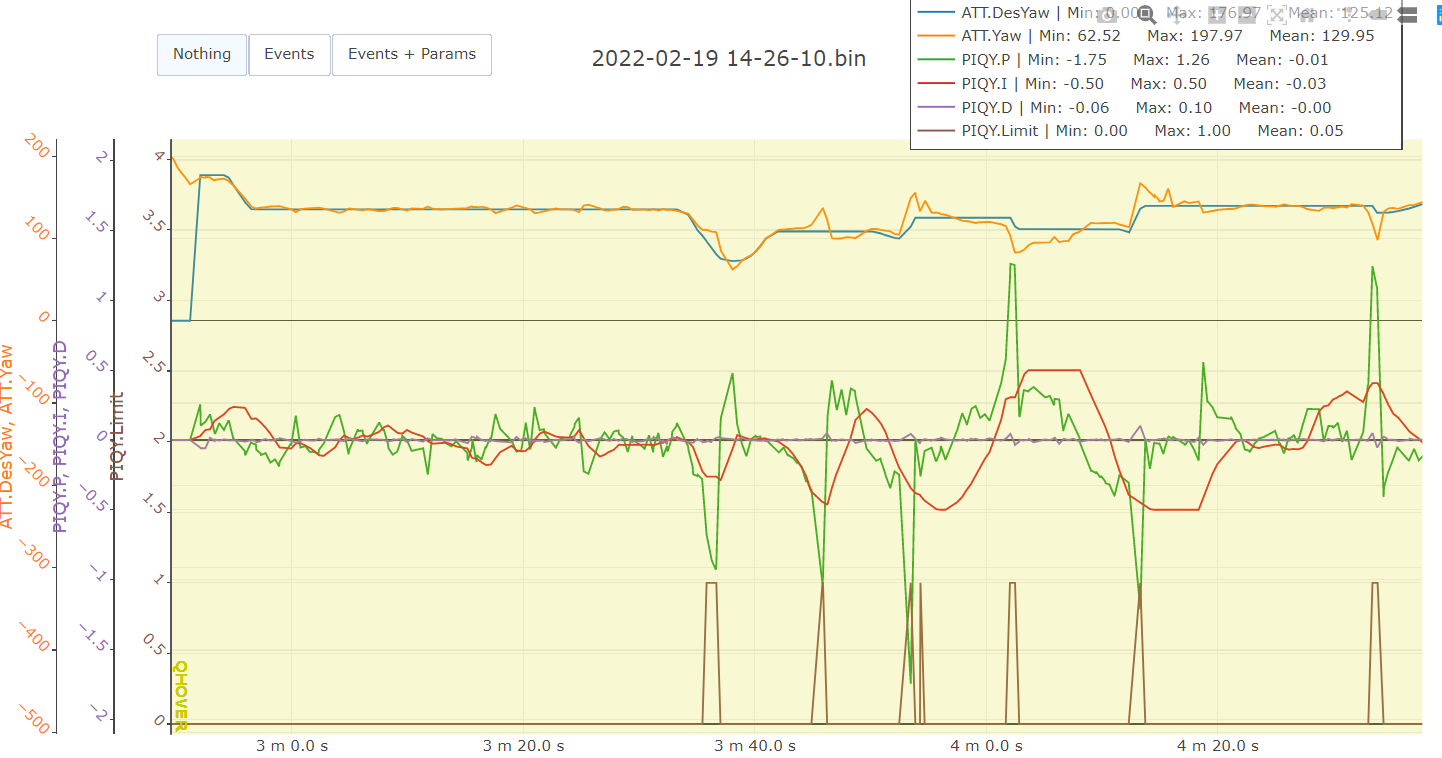
PIQY.Limit is hit on yaw side and loses attitude during moving to sideways.

2 Likes
This looks like a huge improvement. Thanks again for posting these updates. I am now more confident that my next flight might be more successfull than the last one. Are your Q_A_RAT_RLL… settings still on defaults?
Hi @3dcadfreak, glad to hear it can help.
I have not touched Q_A_RAT_RLL for a while, initially I may have changed, have not run AUTOTUNE on this. (Only tried in SITL sim, seems to be working ok.) I keep my settings in this sheet (in comparison with config #1, #3 and losawing’s).
Hi @Satoru_Sasaki ,
I apreciate your last flight and your settings evoluate in the good direction.
Great job 
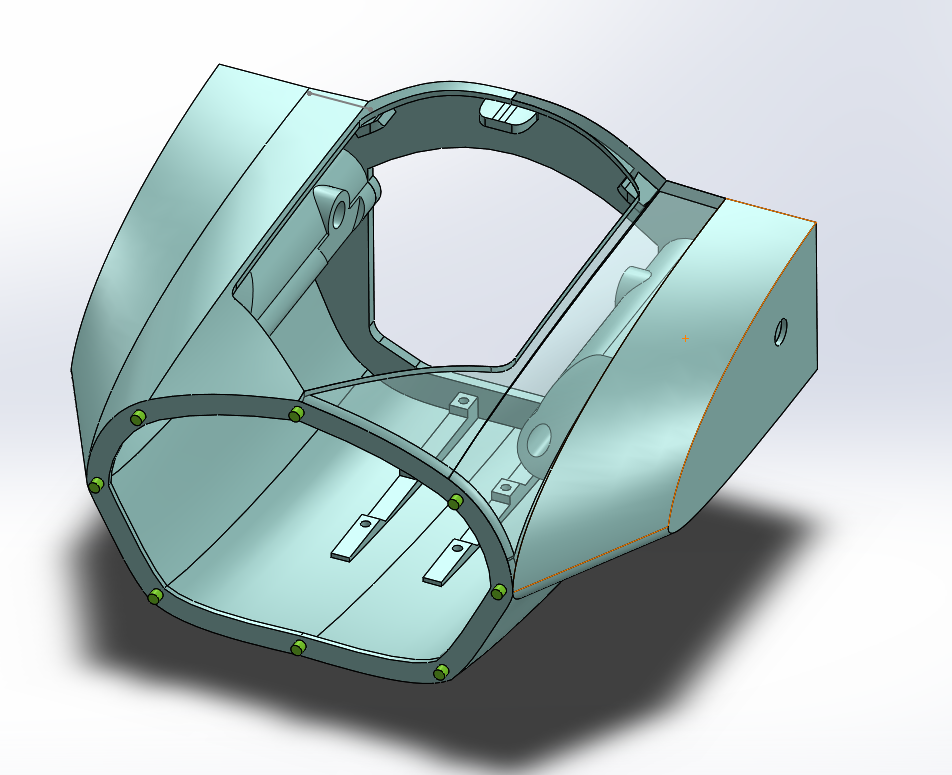
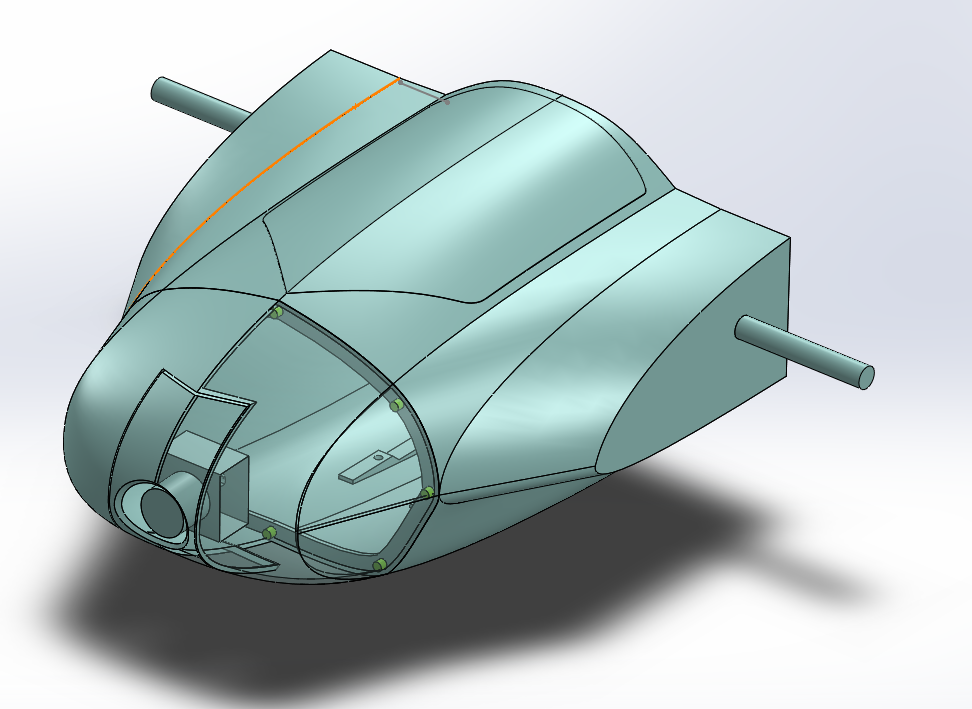
For the moment I work on the 3d print project for rempace the initial noze of my wing with a fpv noze with tilt switching position of the cam to the plane, or Q flights mode
After finish FPV part of my wing, I’m interesting to print a Eclipson E-VTOL .
Possible to obtain the beta test version of the 3D files or it’s necessary to buy ?
Thank you
Possible to obtain the beta test version of the 3D files or it’s necessary to buy ?
not a good idea to ask this. come on it’s 27€
Hi Vogel,
Sorry, maybe my englis and / or my question it’s not clear
I just wont to know if a beta project exist , my intention it’s not a copy file from other user, etc !!! 
I hope it’s more clera now
Sure, the price it’s excelent
Yes, E VTOL is already on sale. I am only a tester, not own the design.
Very nice! design. looks like well designed to the detail. I am only a beginner in design, learning.
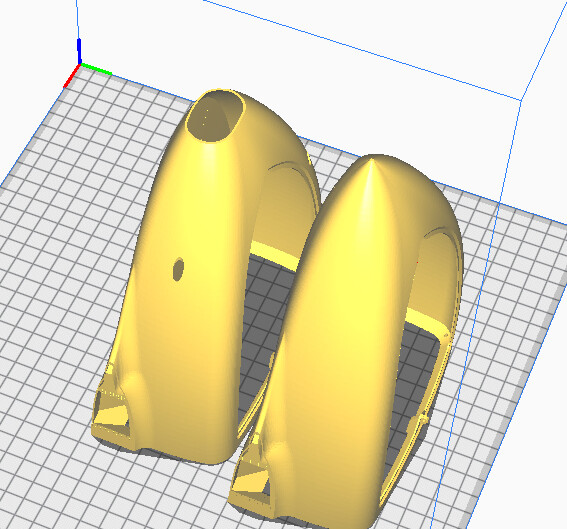
I started to play with this idea.
Hi. I’m preparing to start a build of the E-VTOL. I have a few questions before I start purchasing and printing stuff.
- I was planning on using mostly Polymaker Light Weight PLA (the pre-foamed stuff), but the colors are boring. So I thought I would mix in a few PLA or PLA+ parts in a bright color, maybe orange. Is printing parts in different materials OK for this design? I was thinking at least the tips of the wings, the nacelles, and the nose in PLA - I guess those are the ones that will get the most stress. Do you agree? If not, which parts would you recommend are the most important to be made of a heavier but stronger material?
- What KV motors did you use? Eclipson has a link to a recommended power pack, but their recommendation is confusing. The motors have 3 different KV options. There is a Flite Test pack you can buy but it has 1 motor and 4 servos, so I think I’ll skip that since I’d end up with 8 servos and it sounds like people in this thread prefer a different servo anyway.
- Following links to the props, I found “anti-impact” 8x4 props that are sold out. I can find other 8x4 but most don’t say anti-impact? Is anti-impact common? I’m not seeing them offered at many places. I’m very experienced with drones but not very much with planes/vtols.
- I’d like to add a DJI FPV system. That needs a spot in the nose for the camera, which I can probably cut out somehow, but also good ventilation to keep the Vista/Air Unit cooled. Is some type of air vent for the electronics included in the design?
My last project over the winter was 3D printing a Tarmo4 RC Car, and I was very happy with how that turned out. Now with warmer Spring days coming soon, I want to try out a VTOL.
Peace,
Dave
Hi welcome to the thread!
-
No problem to mix material.
I am not familiar with Polymaker Polylite how strong it is. With LW PLA which is softer as it foams, it helps to make wing1 stronger or print with PLA.
VTP and wingtip (WIng3) can be printed with tougher material, as they absorb landing skid shock. I print my VTPs with PLA (or reinforce after printed with LWPLA). -
I use Sunnysky X2212 1250kv one. I targeted to use GWS type slowfly prop 8043 with 3s battery. This is very common sized motor, 980kv one is suited for 4s, 1400kv one may be also usable as 3s.
Sunnysky USA has detailed info. Mine consumes 11-12A total in hover. If your plane gets heavier, you can size up to 9 inch or move to 4s. -
I see Eclipson spec around prop is confusing. I use 8043 slowfly prop. Any 8 or 9 inch low pitch prop should work well with this multicopter type of usage. Anti impact does not matter. These plastic prop is easy to break anyway, better to buy lots of spare.
-
Eclipson includes several type of fuselage1 and one has camera opening. It does not have ventilation but nose opening should help.
This plane has less number of parts and very quick to build. Good luck!
Love seeing your progress. I had a 2 week break and we are just getting started again on ours. =)
I had a thought about your plane, do you think you could purchase one of those super tiny cameras, and put in a spot where you could record the whole body/wings of the plane? Just to see what it is doing in the air? We had this same thought on ours, because it is useful to see how much flex and vibrations you are getting.
HI @Jeff-openSAR.net , it will be a good idea to load camera on board. I have couple of them and will try. For flexing or vibration, it is visible during hovering nearby, also I found VIBE log is very useful.
I am slowly working on tuning of KST servo config one, we have less calm day season gets close to spring here.
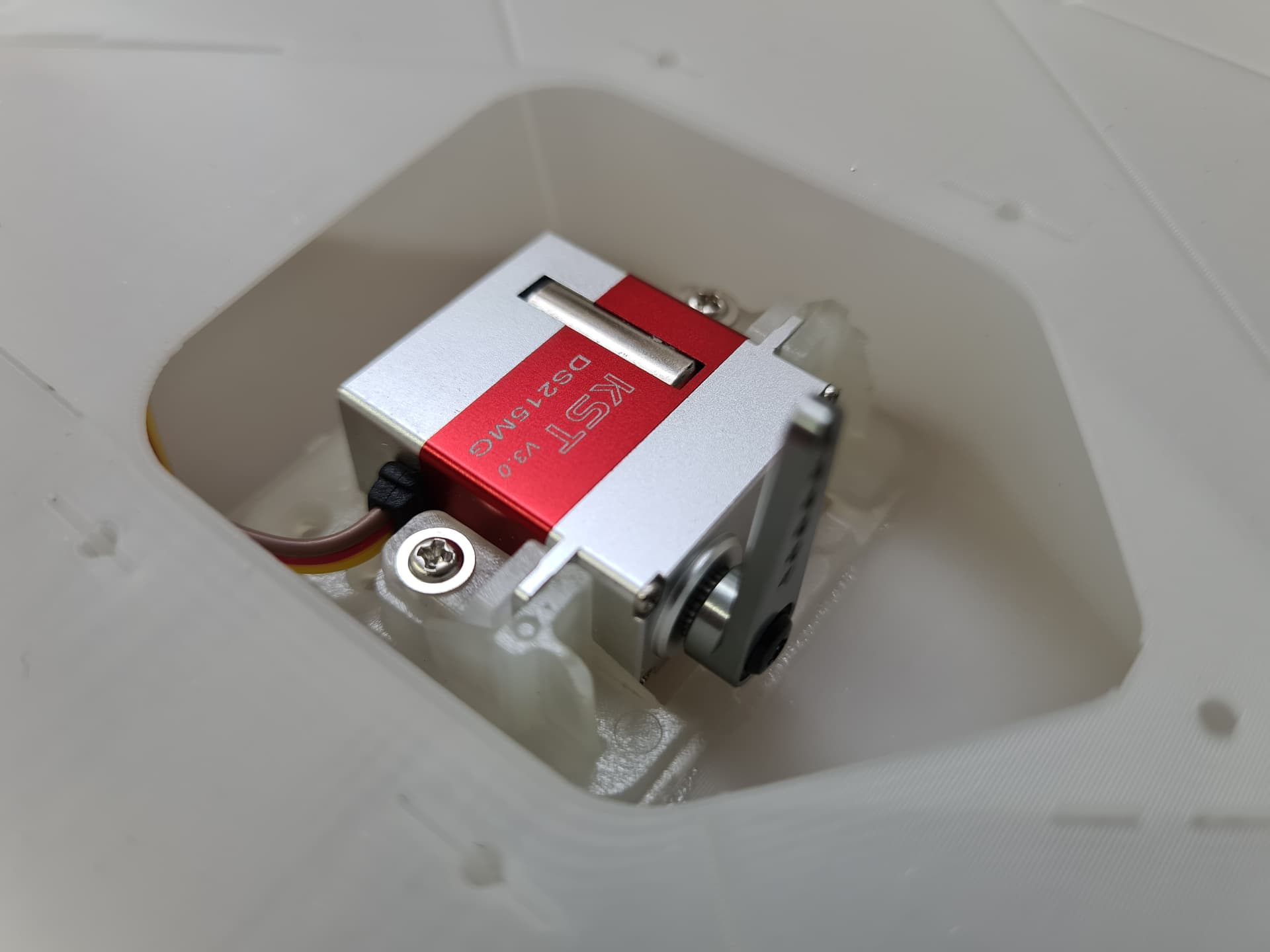
Had a chance to tune config #3 build with fast KST DS215MG servo. Started to think this servo is too fast, or servo speed does not help much?
Video shows flight in 1-2m/s wind from left, periodic gust. I set PID value low, still cannot stop vibration. Probably need to live with this 5-10 or so slew rate? Later I raised IMAX higher. P is minimum I can set from Mission Planner adv menu, I need set value directly at full parameter list menu.
Q_A_RAT_PIT_D 0.001200
Q_A_RAT_PIT_FF 0.030000
Q_A_RAT_PIT_I 0.600000
Q_A_RAT_PIT_IMAX 0.800000
Q_A_RAT_PIT_P 0.200000
KST DS215MG is very good servo, quiet and no slop. As seen in the video, it still has limitation to high wind (cannot maintain attitude in side wind) I started to think this is too fast/good servo, better to go with moderate digital one??

Had another chance to tune params. Similar wind condition.
Settling down Pitch with some vibration, slew rate at 5-10. Worked some fine tuning in this flight. Played with these params for each hop flight, checked how plane behaves in pitch movements. See subtitles in the video for detail. These minor change does change flight feelings. Was not sure how FF works, did not see change (in flight characteristic, and slew rate), so reverted back.
Q_A_RAT_PIT_D 0.001200 → 0.001000 → 0.000900
Q_A_RAT_PIT_I 0.400000 → 0.500000
Q_A_RAT_PIT_FF 0.030000 → 0.010000
Q_A_RAT_PIT_P 0.180000 → 0.150000

Tried transitions, it makes unexpected yawing to the left, in next flight I changed below and improved.
YAW2SRV_DAMP 0.010000 to 0.020000
YAW2SRV_INT 0.500000 to 0.900000
Tried plane loiter ok, it is too far to see in this video…

Sorry previous Log GoogleDrive sharing setting was incorrect. Should be ok now.
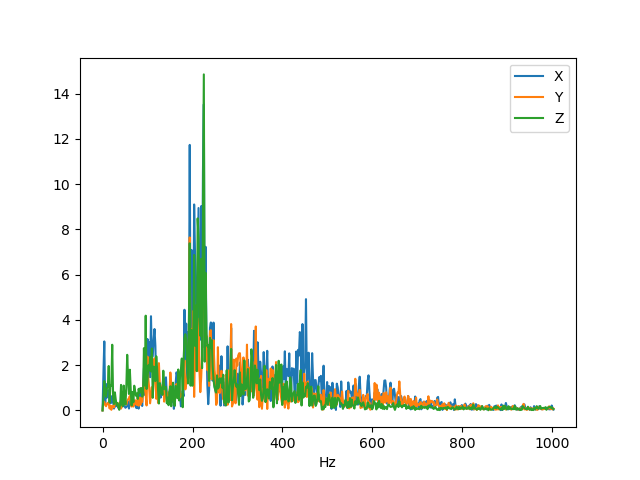
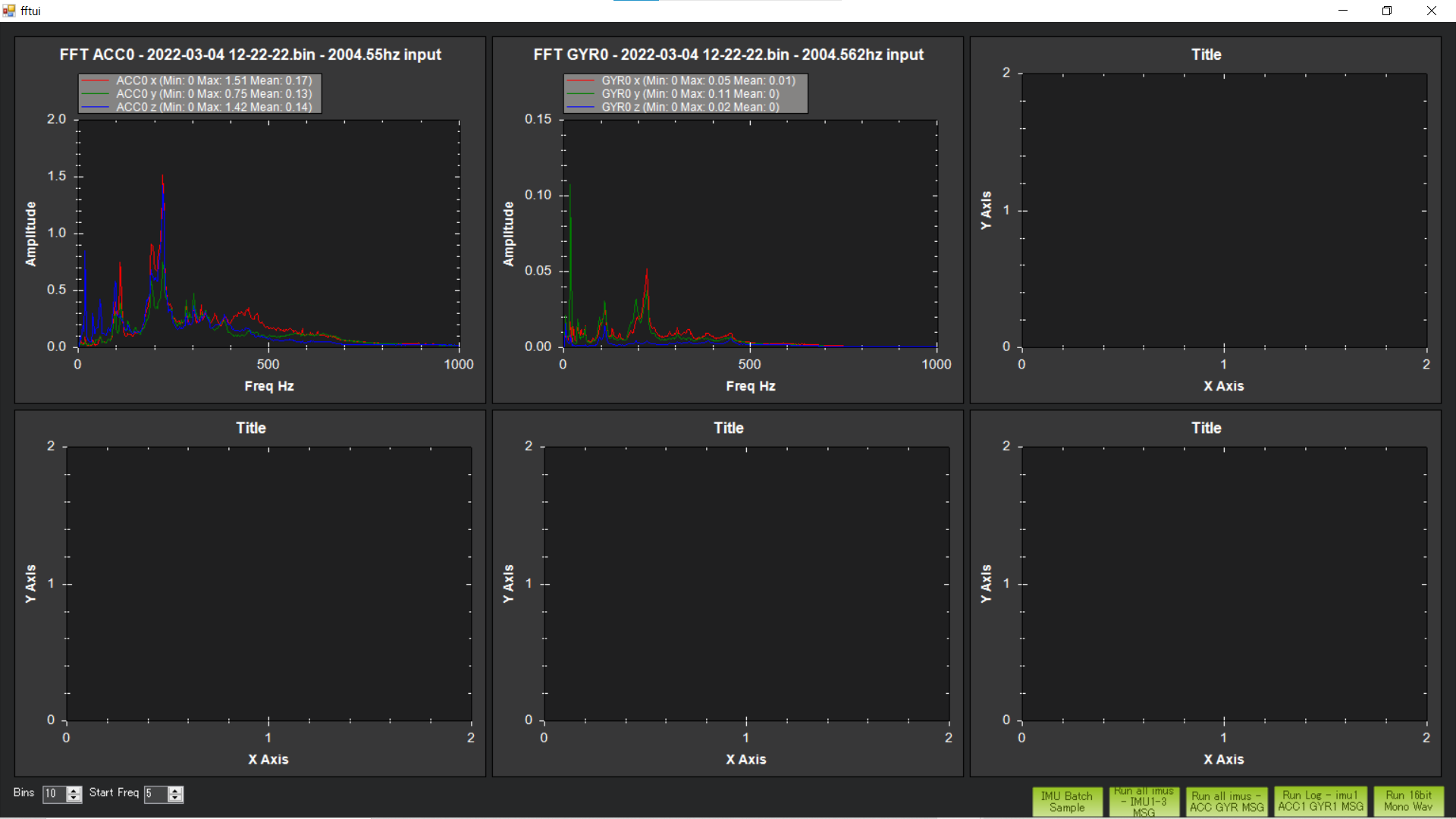
I took another flight with INS_LOG_BAT_MASK = 1. All in Q modes, Peak is at 223Hz/13380rpm, 2 props, also 111Hz/6660rpm. There is low 19Hz peak, perhaps comes from Elevon vibration?
Gyro
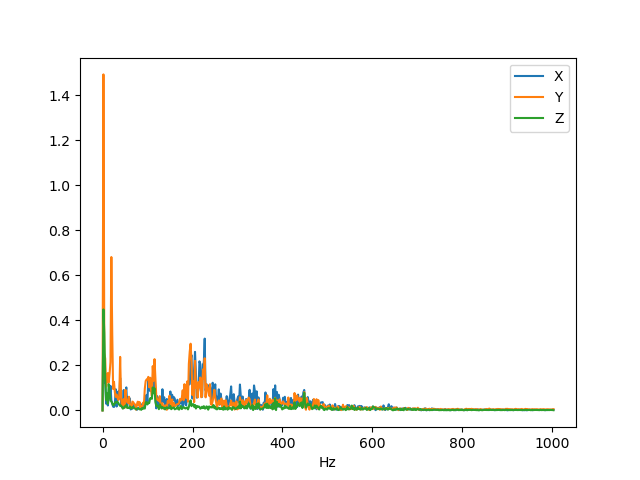
Accel