Hello, This is Nobu.
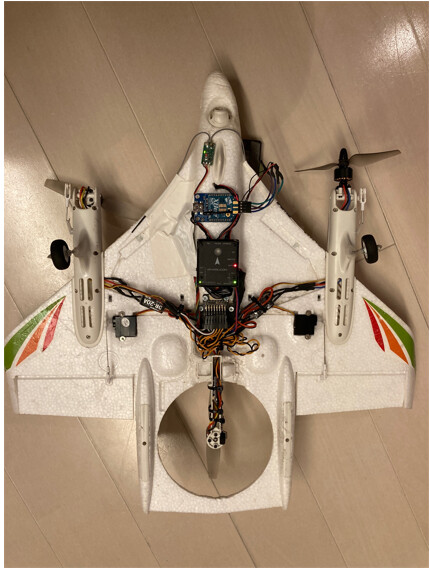
I am making VTOL plane using xk x450.
This plane is silimar to e-flite convergence, and smaller than it.
So the param is copied from e-flite convergence data.
There is no problem in QHOVER and QLOITER mode.(need to adjust detail tuning)
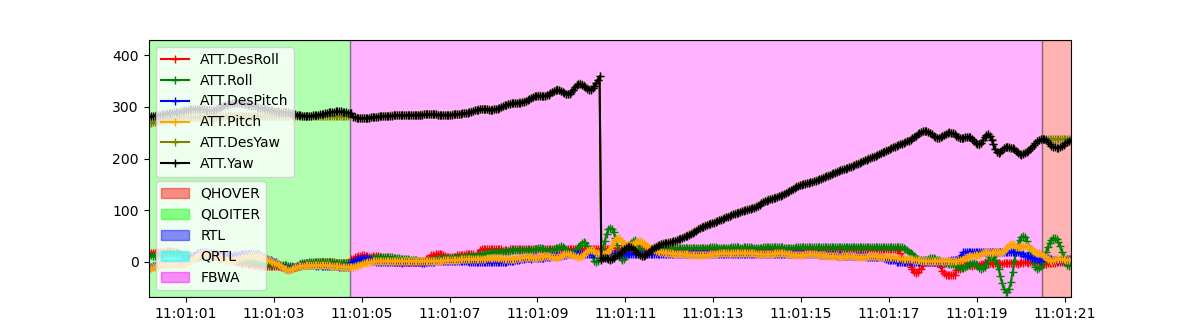
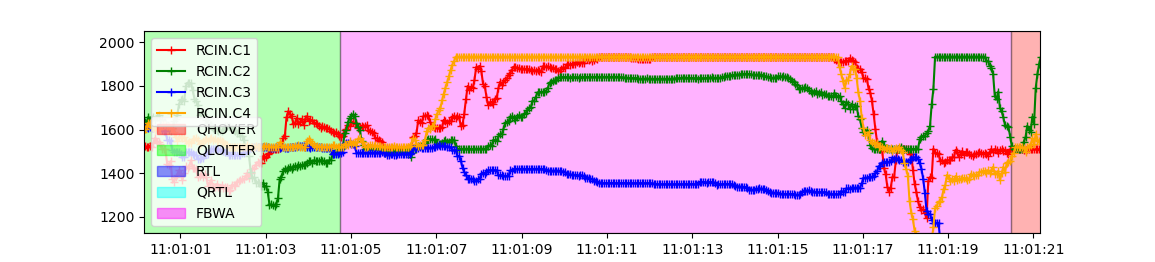
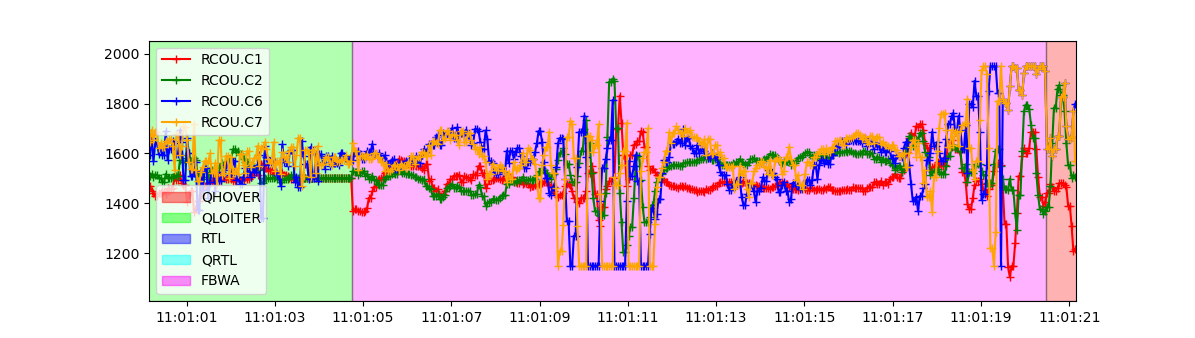
But, when I switch to FBWA mode, the plane start to shake and crash.
I can’t understand the reason. PID tuning? Please help…
ch1:Elvon R
ch2:Elvon L
ch3:Tilt L
ch4:Tilt R
ch5:Motor Rr
ch6:Motor R
ch7:Motor L
Hi @Nobu, nice to convert X450. Would like to see inside how you loaded FCs. Noticed you use 4s batt, plane gets too heavy?
Other veterans may give better advice, but looks to me you are making too tight turn in untuned FBWA with right full aileron and right full rudder (why?), plane yawed too much and lost attitude? These graphs are FBWA part of second flight.
You are able to transition back to QHover somehow, climbed too high and cut throttle, plane lost control to crash? Plane parameter does not look like tuned yet,
RLL2SRV_D 0.000000
I would
1, update firmware to current 4.1 which has better stabilization, better plane autotune.
2, Work on hover tuning more so that it can recover quicker after transition.
3, Run autotune in plane.
Thank you for reply.
I made this 3s battery at first, but thrust power is weak at this weight.
So, I chanded 4s.
In this flight, the plane was off course.
May have been a panic at the end.
I try your advice and I’ll report.
Thank you very much for your support.