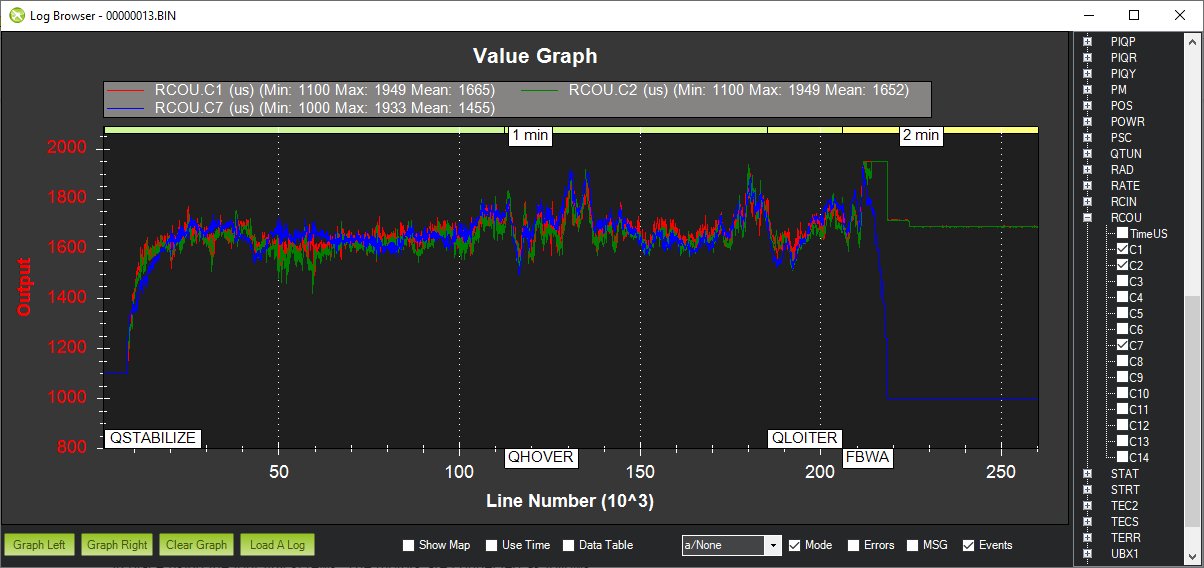
A graph of the Convergence motors is below. Using the RCOUT section from the log, the front two motors are C1 and C2. Notice that the rear motor, C7, drops out in FBWA mode for forward flight. You should be able to see the proper forward flight motor positions using either FBWA or MANUAL flight modes. If not, you need to adjust the linkages or set the SERVOxMAX and SERVOxMIN settings like below so that they point forward and up. Don’t forget to read the Vectored Yaw part of the APM Wiki.
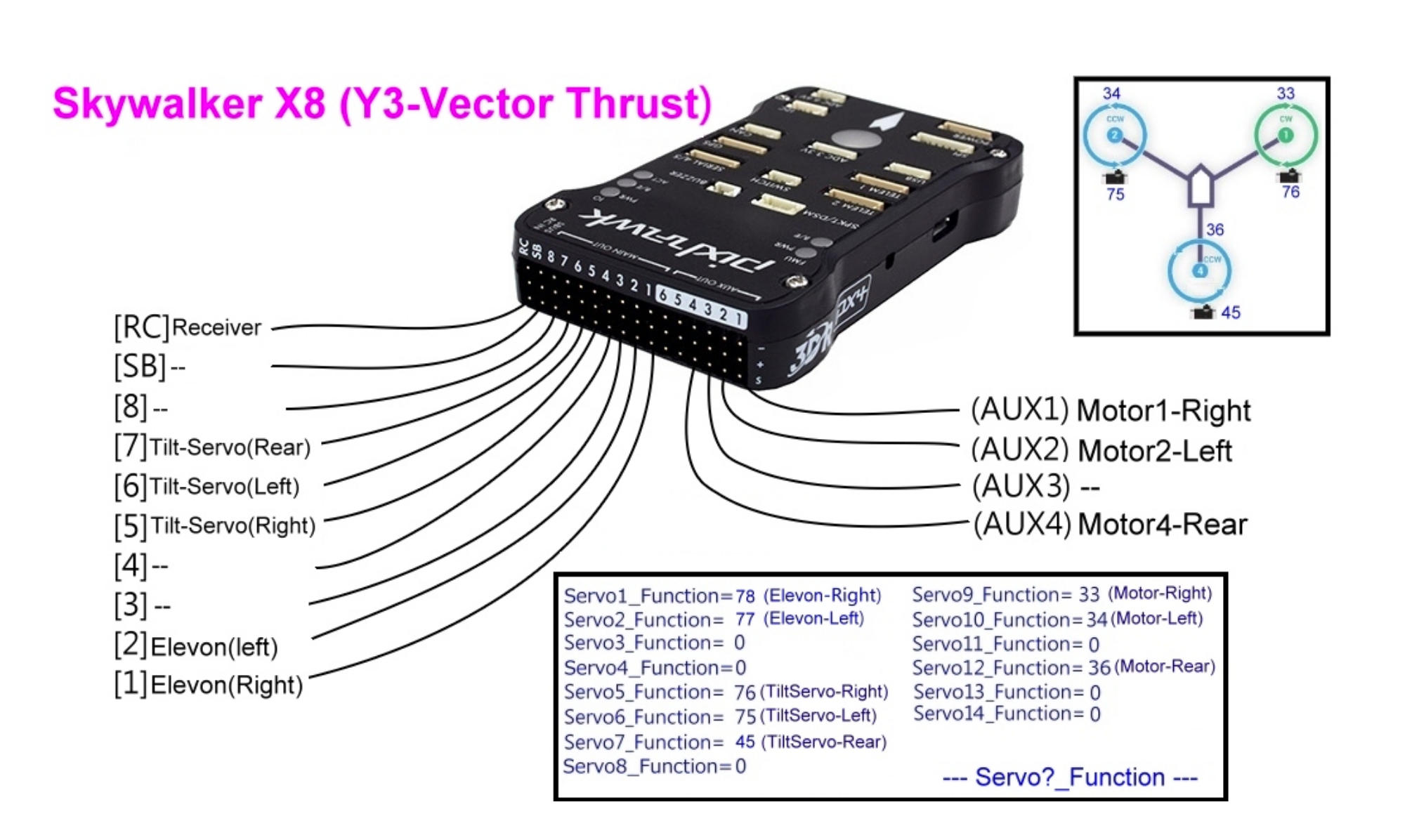
They are all similar. The Nimbus and Convergence use vectored yaw during copter modes and only the front motors are used in forward flight modes. The weebly Skywalker X8 adds to that using the rear motor in forward flight modes but still needs to use vectored yaw on the front motors in copter modes.
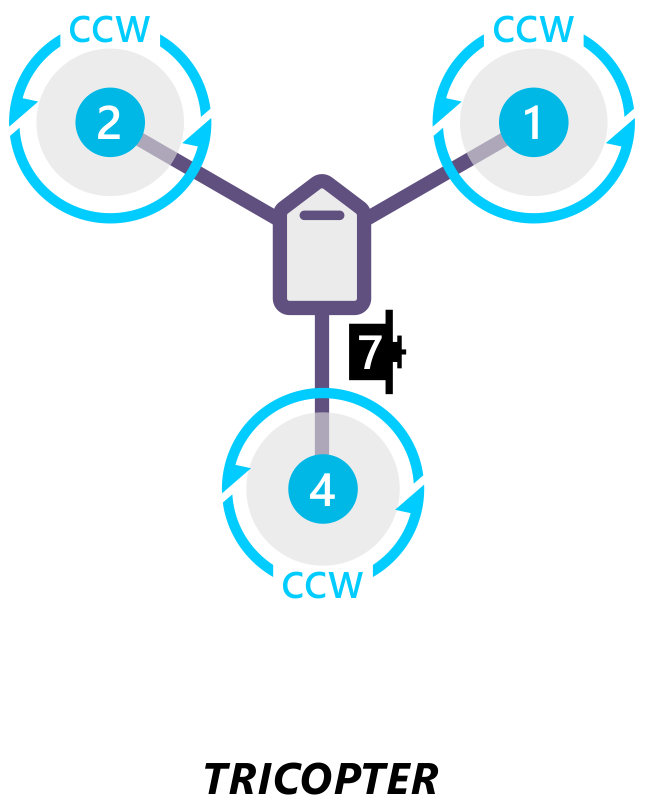
The tricopter diagram I posted above is originally from the copter frame setups so the “7” servo is used to “wag the tail” for yaw control. I recently did this on my so-called FireFLY3 configuration where the front two motors move in parallel by a chain driven system so they cannot do vectored yaw.
In the Skywalker diagram that you posted, the “45” servo is used only to move the rear motor down or back…similar to how the front servos work but they don’t perform any yaw operation that I am aware of.
Hi Greg
Had a mostly sucessful maiden
had a weird one a death roll when transitioning to rth.
have a bit of yaw wobble.
here is fpv you tube link
What do you think, i can pull the logs and post tomorrow,
basically i went from fbwa then cruise quickly through loiter to rtc and she threw a wobbly. my trex batteries were really struggling so this will be rectified but I call this a success as a complete ardupilot beginner a scrap plane Thats converted in a week to a mostly flying model
Thanks again for this write up and your help
Dave,
Congratulations! Remember to respect the wind on a tiltrotor or quadplane as the wings act like sales. For your first few flights, I would only use QSTABILIZE and FBWA modes and always transition into the wind. If you don’t have an Air Speed sensor, then stay away from CRUISE and Loiter modes. They will work on calmer days but not as well.
Hi Greg Here are the logs from the uncontrolled roll event.
from what i can tell having only jut used the blackbox on Ardupilot
i went from fbwa to cruise to rth. at his point an auto rth initiated due to a battery failsafe event. I did enable this to happen. the model banked on the rth then continued to roll it probably tip stalled with the help of turbulance from the hedgerow underneath.
the blackbox seems to show the accel z axis clearly going ballistic as does the rc out on servos the front motors also maxed out. Fortunately when i switched to qstab mode the model recovered.
i think this may have been a fluke maybe due to 2 rth event maybe being initiated one by me and the other a failsafe in combination with an inadequate battery with wind.
Anybody conversant with the logs i would welcome feedback.
I didn’t see any problem in the video. If you have RTL or QRTL enabled, even on a failsafe, it can be dangerous if the plane is in a hover mode when it is not facing the wind. A QuadPlane has better performance in this situation but it is still something to learn to keep an eye on. If this occurs, and you have a visual on the plane, switch to QSTABILIZE mode and land.
Make sure that you have Q_WVANE_GAIN set to a non-zero value like 0.1 and the nose will swing into the wind automatically.
To post a .BIN file, you need to host it somewhere and then post a link to it…due to the size.
Greg it’s the 2nd video at the beginning 3min should be I was last night very tired and initially posted wrong video.
I have tried to upload flight log but am unsure if I did correctly.
Flight log is very interesting.
Thanks for your help. Also at least part 1of flight look normal to you.
Hi Mark unfortunately I am unsure how to host this file am new to this site etc Greg mentioned I need to host this file and link to it I think he meant. I haven’t gone any further if you can explain an easy way to upload I will try.
Thanks for your interest.
I think a number of factors were possibly involved here and a tip stall may have happened.
PS i have increased fbwa bankand pitch angle by 10% due to my confined flying space and the acro rate mode pitc and roll from 180 to 40 roll and 58 pitch these from when i fly in acro mode in inav when fpf have covered many miles using those
can you forsee any issues with those its way too windy here in UK again…
Thanks
Dave