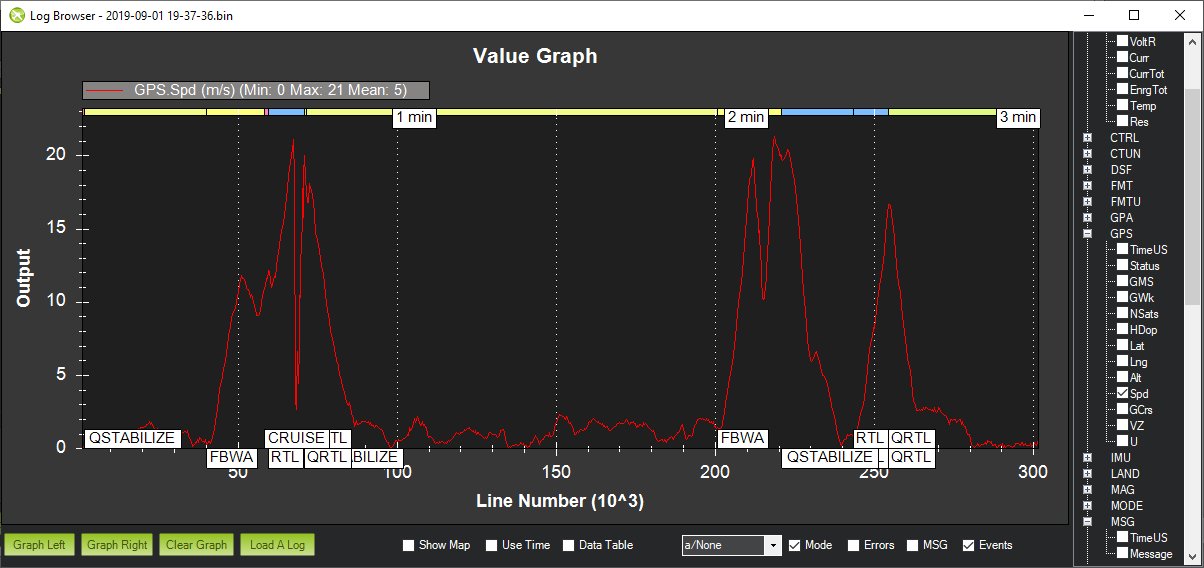
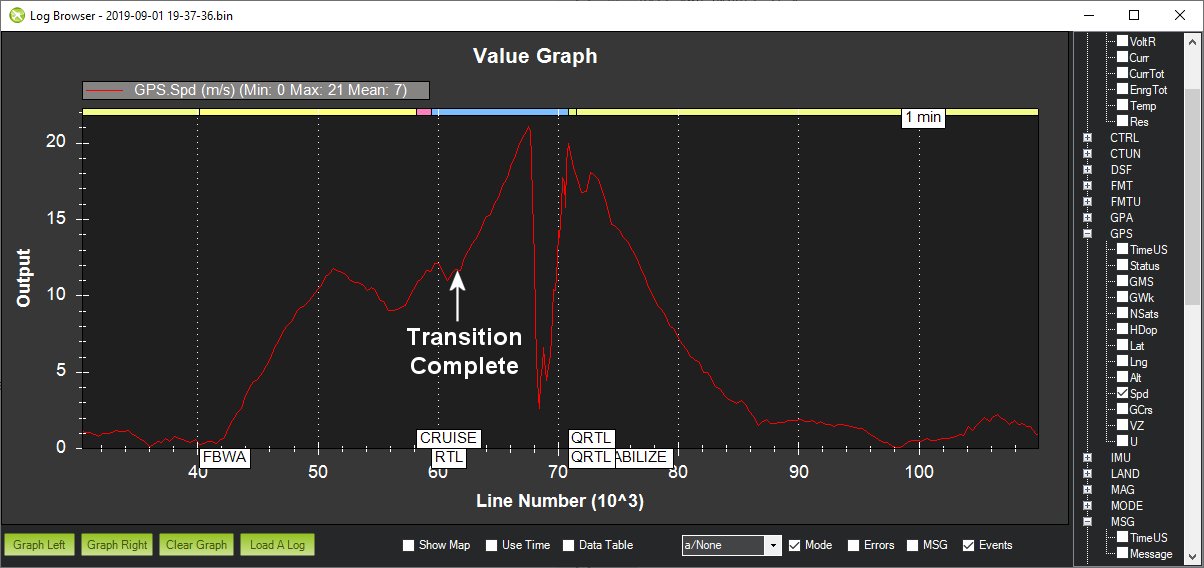
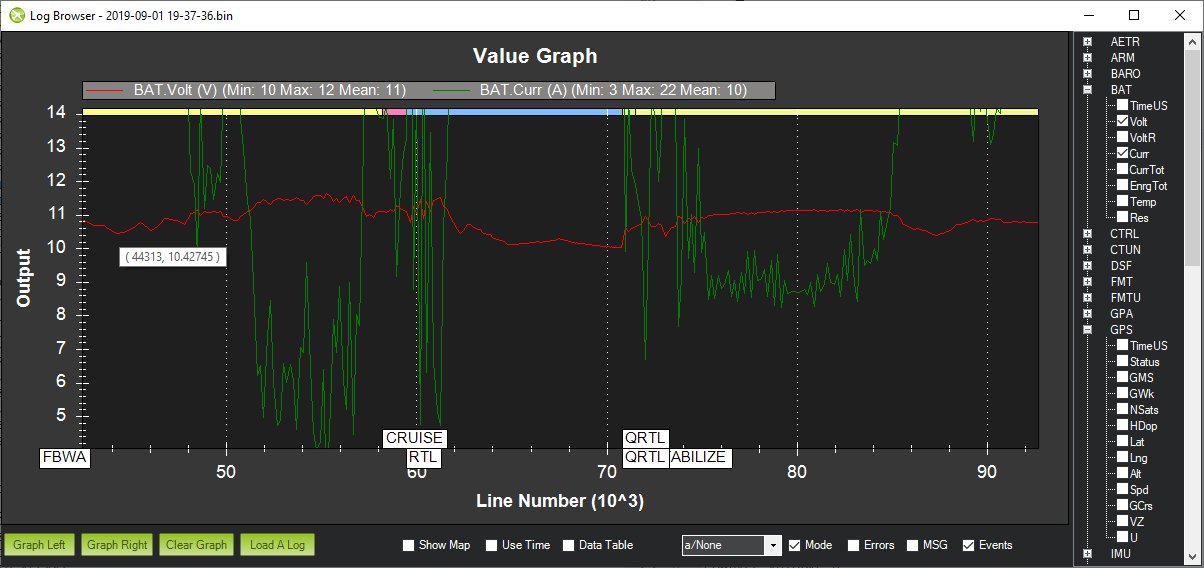
I looked at your log and saw some strange behavior. Every one of your FBWA transitions results in an RTL/QRTL mode. I would disable your battery low failsafe or drop the trigger level to something like 9.5v since it is under load. I have mine disabled.
I’d recommend using the default log bitmask; all of the EKF logging is in there too and analyzing VTOL transitions requires attitude data.
Dave’s log shows RCIN.C8 commanding all of those transitions to CRUISE and RTL. It’s interesting that just before the roll, the switch to cruise then RTL was commanded while still transitioning from qstabilize to fbwa. Maybe there’s a bug in the transition logic.
I have noticed also on my Taranis that switching the S3 knob slowly causes the RTL mode to trigger. This may be making the channel go to one end momentarily causing the unwanted mode change.
first just try the betaflight config when board is in DFU mode…if it doesnt show as “DFU” in the config port list, then try replacing the driver…
as to the rotary switch…mode changes have a “debouncer” built into the code…but I imagine its time is based on a normal switch (prolly ~100ms)…but a rotary switch wiper can actually pause for quite some time making NO connection as its rotated (slowly)…probably makes the TX go to a channel min or max…it could well exceed the debounce time in the code I would imagine
Ok, thanks, Henry. Maybe we need to make the mode change bounce delay visible to the user or add a FrSky Tx mode change feature for S3 on the Taranis or FM on the Horus. I try to change my knob as fast as possible or only one position at a time. I do love having six flight modes available on one knob.
@hwurzburg Thanks, booting with the DFU button pressed resulted in the board showing up as “STM_BOOTLOADER” in Zadig. After replacing the driver with Zadig, the BF configurator connected in DFU mode, and I was able to flash ArduPilot.
Hi Mark.
Thanks for checking.
I think this is discussed elsewhere, but i use betaflight and inav for 3 years with sbus ot tbs etc there are i believe 16 chanels available. 4 are usually the main control channels leaving another 12 one of which is used to pass rssi signal back via telemetry to taranis tx.
So 11 channels are available to use as dedicated modes. This has worked flawlessly for me for easy clean mode changes and also for such things as a lost model beeper.
I believe when i am used to the ardupilot setup and with some tweaking of taranis prog that i wont be flicking hapazardly through random modes.
I have eye surgery next week and am looking forward to more testing as and when weather and eyes permit. This has been a great project to keep my old grey matter active.
Thanks.
Dave
@davidabevan Best of luck with the surgery.
I use one 2-pos and one 3-pos switch on my Taranis X9D.
Usually the 2-pos is FW vs. VTOL so it’s easier to remember roughly which switch to flip when panicking. But I often wish I could have more than six modes without changing parameters.
It’s nice now that Yaapu telemetry announces the mode; I no longer have to program the TX to tell me that.
Mark,
Yes Thanks.
I Have also adopted similar a 2 pos switch either plane or quad mode with functions assigned to a bank of 2 switches denoted by the 2 switch mode. I Cant get Yappu to work it loads fine as per my other telemetry screens EG Inav, but no good it seems with TBS its strange as all telemetry is there on my taranis gps altitude pitc roll etc and also using the bluetooth i have full mission planner including writing to the flight controller, i in fact was able to test this evening for an hour with good results. the wind acually died down i had some good results with qloiter qstab and fbwa transition i did one rth that was flawless so a great test.
Dave
Hi to Greg and Mark.
some footage of Convergence doing its thing,
really nice flights today a break in the weather luckily before eyes are done.
will tune up acro mode later in time after i have read up a bit, it doesnt feel very locked in yet.
FBWA and other modes work really well.
Thanks Guys…
I tried ACRO mode with my mini-Convergence, but it didn’t end very well…
I think I let it get too slow in a turn and stalled it. Turns out I was less than 1 mistake high, and switching to QSTABILIZE didn’t quite save it. Was almost level on impact though, and only minor damage; lost a tilt servo linkage and the corresponding prop. Would have probably helped if I had set up acro mode on my TX with lowered rates and some expo because the controls were way too sensitive.
Hi mark.
I found the default of 180 wayyyy too high
Set mine to 40 roll 58 pitch that gave a similar roll and pitch rate as per fbwa. A start.
I fly a lot in acro mode using fpv with the zohd dart using inav with a good tune can do things like split s and inverted with ease.
The acro felt very loose on the gains so perhaps i can increase my acro rates 10 percent and raise the p term and i terms a bit until the plane feels more locked in.
Sorry to hear you crashed hope its fixed up soon.
PS Greg mentioned that acro not recommended. Is this because of software or for pilots not used to flying in such modes.
As i fly quite complex moves and los 3d and heli pilot would like the flexibility of throwing the convegence around the sky😀.
But am so pleased with Sundays 5 lipos worth.
Cheers.
Dave…
I think the advice to avoid ACRO mode is meant for non-tiltrotor quadplanes, since it says the quad motors are not “engaged”. When a Convergence is in ACRO mode it should behave exactly like a twin engine plane, so there is no reason a competent pilot shouldn’t use it.
This is a SITL run with ACRO mode at 180 deg/sec for pitch and roll