So guys, after two successful flights with transitions both Qstab to FBWA and back to Qstab to a lesser extent because of not enough elevon authority (not big enough), I now got the robot servos and transformed my tailsitter to vectored.
Now, I have a question, I noticed the vectored motors are actuated in FBWA mode as well, not only in Q modes. In Manual mode they do not move, as I did expected. Is this the way they work or I have something wrong in my settings?
Skywalker Back-Transiton Tests.
FBW to QHover as bad as it was also with my Caipirinha, due to long Thrust low during the Transition.
Issue: To maintain the altitude has priority over the Attitude of the Wing instead of inverse.
And the Backtransiton FBW to QStabilize is worse then ever.
The wing makes an uncontrolled Yaw of 90 to 180 degrees althogh the flight attitudes in Hover-and Planemode are perfect.
FW Plane V 3.8.5. Would it be better with the new Version?
Tilt motors servos are actuated both in fbwa and manual modes. Q_tailsit_vfgain controls the gain of servo tilt in all plane modes. In manual mode tilt motor servo rotates according to Tx input but of course does not rotates if you move the plane as they do in FBWA, this is the only difference.
Short Message about Backtransition to QStabilize.
I flashed the new FW V 3.9.2 and amazing: The Backtransition FBWA to QStabilize is
as usual perfect. More in a Video soon. Seemed to be a bug in V 3.8.5.
Thank you for sharing your experience, your videos are always interesting.
Have a look at posts 1295 and 1296, from 3.9.0 there has been some improvements for smoothing transitions.
Other improvement is the fix done by @iampete in order to reduce the pumping problem. It is now merged and you will find a parameter q_tailsit_thscmx which default value is 5. Reduce this value and you will be able to fly much faster in hover without pumping.
It seems to me that bad transitions with previous firmware was an overshoot of the vertical position. Maybe more q_a_rate_pit_d had helped.
Thank you for the feed back.
Amacingly, the Skywalker didn’t pump with V 3.8.5 as the Caipirinha. There I spent a summer to get it out with changing PID params without success. As you can see in above video it leans stable with 40° Pitch against the wind but with verry low speed. With the mentionned improvement, I will try to increase Q_Angle_MAX. But sorry, I didn’t understand what was described in the Full parameter list of MP about q_tailsit_thscmx. “Reduce this value to remove low throttle D oscillations.”
I did not change the params between the 3.8.5 and 3.9.2. With the new FW it makes no more spiral up to QStablilize, perfect.
But to QHover when it reaches the vertical position it still makes strange movements for a short time.
Here the log: https://drive.google.com/open?id=1W9LohyQTlJLXGPELQN1ljCMRNfqiPArv
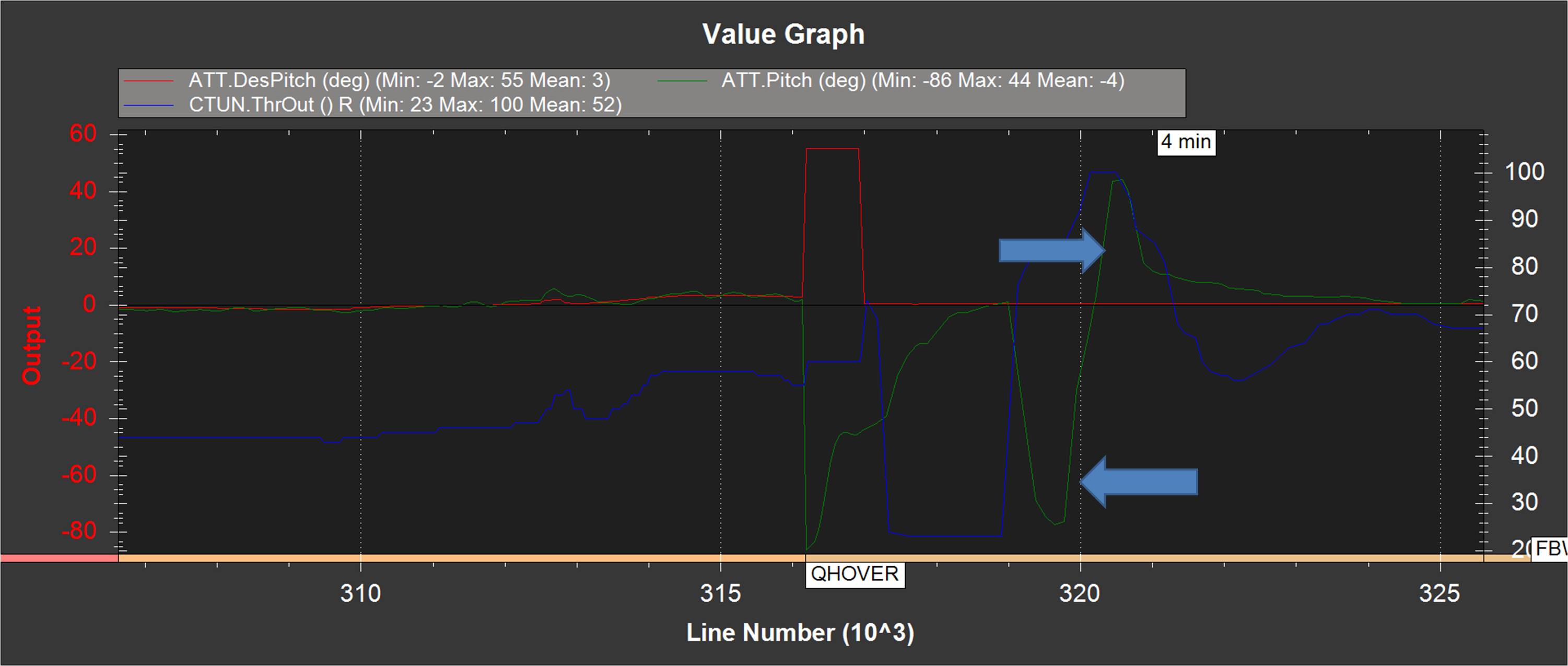
It seems for me when throttle increase again it falls back an then overshoot.
Click to enlarge the pic. Left scale pitch angle, right scale Throttle out.
In your log there are 5 nice transitions to Q_stabilise and one bad to Q_hover. A big difference I can see between both types is the level of RCIN_C3 (your throttle input). 5 time 1593 when Q_stabilize is invoked and 1502 when Q_hover. I don’t understand why a such difference and how you are able to ask 5 time exactly the same 1593 value. Nevertheless a low RCIN_C3 value can be interpreted by the pixhawk as a descend order and this could be the reason of low throttle out once the transition message is given. Again I don’t understand because 1502 seems to be within the dead zone of the throttle stick (RC3_DZ) and should not ask for any vertical speed rate. On the other side 1593 ask for positive vertical speed.
About parameters to test:
You can try to lower Q_vel_z_max. 1m/s is a safe value
Your q_m_thst_hover value is a bit low. According to your log it should be 0.65. I think is will give more speed to your wing during transition.
If you don’t want throttle_out to drop bellow a given value, you can play with q_m_spin_min. I have 0.25 to 0.3 on my tailsitters.
Thanks for analizing the log.
According to the Mode, I have a curve in the Taranis to set the Stick middle position (Spring) as it is needed.
For QStabilize 1593 which is about the trust needed for hovering (Depends on the Voltage)
For QHover 1500 because with this it holds the altitude.
For FBWA,B and Loiter RCIN_C3 depends on an other 3 pos, Switch.
– Throttle low = 45%
– Throttle mid = 55%
– Throttle high= 70%
With the last I can quickly change the thrust to a defined value without looking on the TX.
Now, when I approach in FBWA with Throttle low (slow bevore the transition) and switch over to QStabilize
at the same time the RCIN_C3 change from 1452 to 1593. Which holds more or less the altitude.
The same from FBWA to QHover is 1452 to 1500. Which holds the altitude controlled.
As you can see in the pic (last poste) the Transition to QHover is perfect until reaching the vertical positon.
Then the throttle out increases and the wing pitches. (or inverse)
By the way. The same pitching effect I have seen with me small one, Caipirinha.
As I understand your comment, you are sure it can or should be better or even good (no FW bug?)
and you mean it’s worthwhile to fight vor it?
Can you poste a log of your Tailsitter to see, how it transit to QHover?
Will test your params-suggestions soon.
Regards, Otto
Its quite hard to tell from the vid, but if you see pumping or shaking in Q modes when the throttle is less than hover throttle this should help.
You may have turned with these oscillation in mind such that lowering q_tailsit_thscmx will allow you to increase your gains for pitch and yaw. I found they don’t show up unless you have a fairly aggressive tune.
Hard to tell from the vid but if your takeoff shaking from motor thrust there is no fix at the moment. It is due to the controller not realising the motors are pointing up so it trys to correct roll but the motors are correcting yaw due to the motor angle at takeoff.
I understand now how you manage the throttle. From my side I manage the throttle manually and make back transition 100% to Q_hover.
not sure to understand your question:
Back transition was already OK For me from 3.8.3 so I cant say much about FW. I think you have demonstrated that from 3.9 back transition was improved. But right speed and right parameters is also important. Q_m_thst_hover is a critical parameter because it gives the throttle level (and then the speed) during the first part of the transition between level up to Q_tailsit_angle
Here after 2 log of a new tailsitter still in development running with FW 3.9.1
These log are all I can share for the moment because I have erased all previous log to make room on the SD card.
I have throttle right and left connected like you. Only one transition per log because this aircraft is designed for speed and can not hover for more than 3 or 4 minutes (small and high pitch prop overheat the motors).
You will see within log43 right after the back transition a large pitch error, I think it was because I requested too much descend speed (q_vel_z_max=3m/s)
@iampete
Tried to increase Q_TAILSIT_ANGLE TO 4500 and then it shaked heaveli when flying forwards.
Reduced Q_TAILSIT_THSCMX to 1.0, as also letpi recomended, and now it is calm.
Will soon increase Q_TALSIT_ANGLE TO 5500.
Thanks for this great param.
@losawing,
I set Q_SPIN_MIN from 0.15 to 0.3, and Q_M_THST_HOVER from 0.6 to 0.65 and great success!
The Backtransition to QHover ist (nearly) perfect. It overshoots the vertical position with 10° only, the altitude by 7 to 9 m and then sinks (still vertical) 2m.
And this with a Transtition-approach Speed of 56 kmh.
Thank to both for your help, now I’m happy.
I have another question.
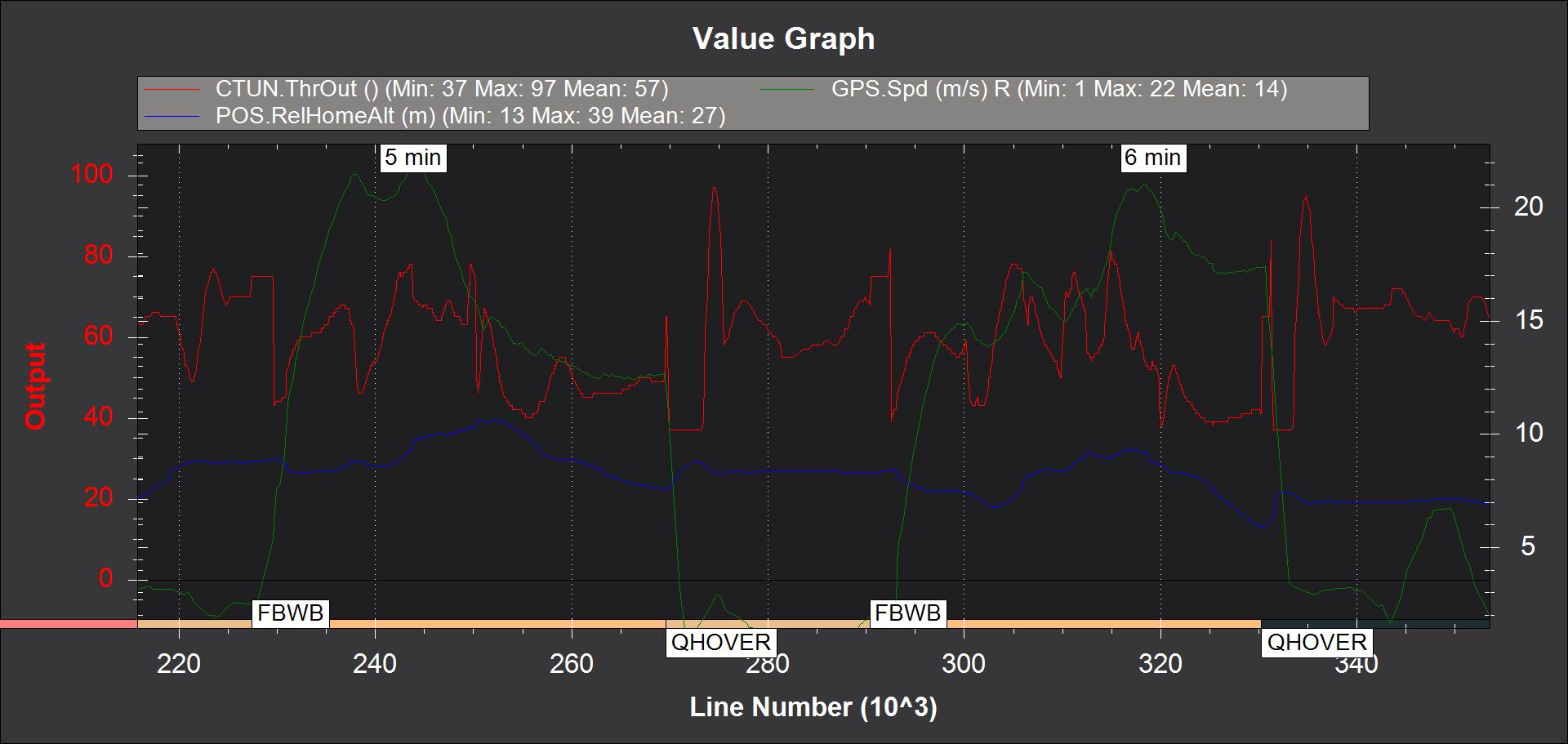
During FBWB I can see, the Throttle_out changes (slow oscillation) from 30to70% with constant RC_IN_C3 of 1450.
I can’t see any corelation to a value like altitude, GPS Speed or Roll- or Pitch-Angle.
The ARSPD_USE ist still 0
Can you explain what happens?
Sorry, no video, due to the strong wind absorbed, forgot to swich ON.
Regards, Otto
the long nose is an effect of the photo, its length is equal to the wing max cord.
The cg is set to give a static margin of 8% which is on the safe side and the wing fly well in manual mode. Neutral position of elevon is a little upward with respect to the airfoil neutral line and this is the confirmation
that the CG is a little forward. Maximum recorded gps speed is only 162km/h. I plan to change propeller for 7.5 inches pitch instead of 4.2 for the moment. I will also add 2 more motors for around 1000W max on 4s.
I dont know. I would try to tune the TECS but before doing that I would enable airspeed.
More feed back to the dev’s from Skywalker 6 Project.
Test 12, with Q_ANGLE_MAX set to 5000 and ARSPD_USE = 1. @iampete Thanks again, it works, nice “flying” in hover. Helps a lot for landing in wind.
And funny Backtransitions thanks the help of @letpi. (Probably because the Param Q_M_SPIN_MIN set to 0.3)
Still strange Throttle oscillating in FBWA. Two times a saw that the props stopped for a short time (ESC’s Brake enabled)
It seems nescessary to study the sophisticated TECS Tuning
I’m shure, there are some “screws” to solve this as all other issues so far.


 the sophisticated TECS Tuning
the sophisticated TECS Tuning 