Yes!
Okay so this is not an option. So I have to tune FBWA/FBWA. Any suggestions for better PID settings without oscillations?
Yes!
Okay so this is not an option. So I have to tune FBWA/FBWA. Any suggestions for better PID settings without oscillations?
hum, did you extend the elevons? it could be that.
Just dial back the gains abit say to 90% of what they are now. Them once it will fly round you can auto tune it.
Yes could be that. With original elevon size it does not hover. With larger elevons the CG should be slightly more behind. But I flew the wing (pusher configuration) before nose heavy and tail heavy and there were no oscillations. It was just a little harder to hand-launch. So the only reason for that could be the much larger force on the elevons caused by airflow from the props and its larger size.
All gains? Thought only P is too high when there are low frequency oscillations.
This is the behaviour I have got numerous time during transitions when a motor is stronger than the other or a wing heavier. This is because right after transition_angle the yaw ‘plane’ axis is no more controlled and the airspeed no yet high enough. You can reduce a little servo3_max or servo4_max, the one where your stronger motor is connected.
yes, ptch2srv_p is very likely the parameter to reduce. I would halve it.
Yes you are right. One motor really is stronger than the other. It turned left so the right motor must be stronger. And it is really that:
Left motor
Thr Thrust [grams]
25 154
50 522
75 1004
100 1300
right motor
25 174
50 555
75 1121
100 1421
So I have to buy two new motors, hopefully more identical than the last ones.
Will it have any effect on other flight modes than transition?
I try with reduced pitch p when everything is repaird.
This was my transition.
I don’t think you have to buy new motors. As fixed wing, your aircraft self stabilize thanks to the winglets and because it is a swept wing and as a bi-copter it is stabilised by the pixhawk. The only critical moment is during transition when air speed is low. If you reduce servo _max you will reduce the maximum output for all modes. I think It is the same as a servo throw reduction, so it should be proportional. I mean if you lower servo3-max from 2000 to 1950 you lower the maximum output by 5% but only 2.5% at mid throttle (assuming your esc are well calibrated and have a linear response)
Okay so reducing Servo-max could help a little. I try that and new P-value the day after tomorrow. My ESCs are calibrated but I do not know about the linear response. They are flashed with BLHeli FW.
Yes it is stabilized because of the winglets and swept wing but also because of wing twist. I asked the manufacturer and they confirmed that it has a wing twist of 1.5 degree. Without the wing twist could not fly as stable as it does with its small 45-degree winglets. It would need an additional vertical stabilizer or larger winglets with higher angle.
How not to do.
Yes, amazing and frightening when we see the route over the city.
You were very lucky that your wing fly level in FBWA mode.
With a simple dipole antenna on both 3DR radio you can follow your aircraft at several kilometers. This is what I do when I fly out of see view. Never sent an aircraft further than 3km though.
I use the standard stick antenna on 3DR Radio with 433 MHz 100mW according European Low.
It looses contact 800 to 1000m at 40m Altitude.
Can you tell more about the dipole antenna or post a link where to buy, please?
the following link contains all you need to make your own antenna
https://www.rcgroups.com/forums/showthread.php?1159968-Build-your-own-TX-antenna-for-FPV
you just need a 50Ohm cable with a SMA male connector, this type
Cut the cable and you can make 2 antennas.
You need also some copper wire the diameter you want.
One limitation of dipole antennas is they are linear polarized, so both antennas must have same orientation. Vertical is better.
My own built
With plastic tube for ground antenna and the naked one for air because it is lighter and can deform easily
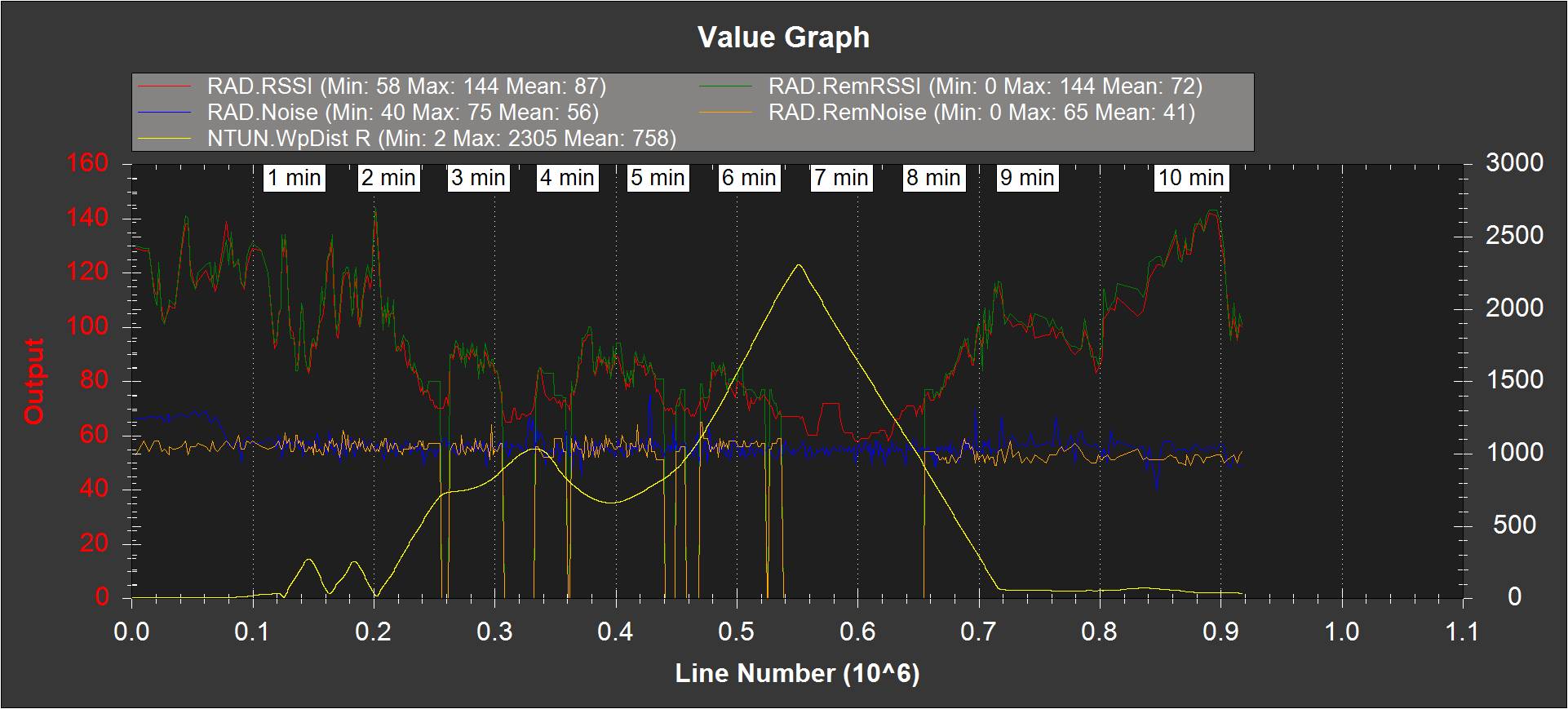
If you want to tune the length of the dipole, you can try to display the RSSI of the 3DR radio while flying at distance with a copter.
Reducing servo4-max from 1950 to 1900 did not help. The plane hovered as normal but in horizontal flight, the plane flew in right circles. Before it flew straight but just turned left during transition. I think reducing servo-max means that it always reduces servo-max in horizontal flight. If not, I cannot explain why it flew circles. it was really hard to control.
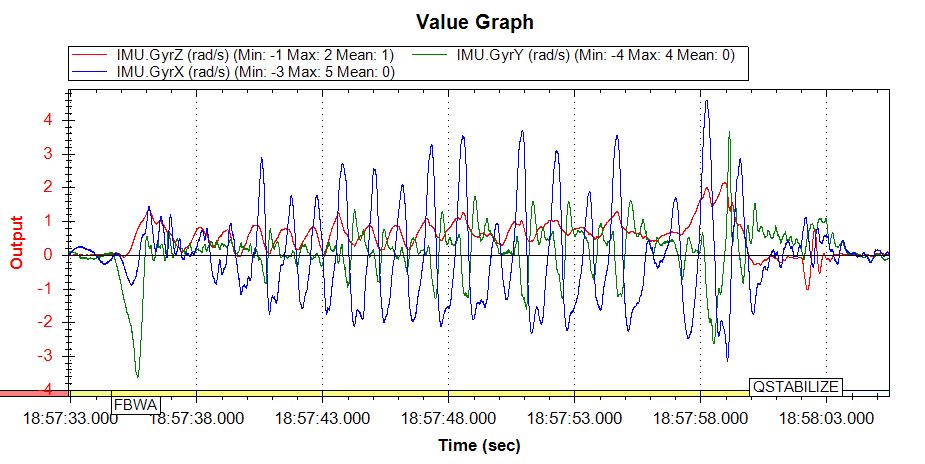
During my last flight I had no more pitch oscillations but instead of that roll oscillations. I think also reducing P value on roll?
But I could measure power consumption. I wondered that it is three times higher:
Flying wing with 1 motor:
50km/h: 68Watts
60km/h 82 Watts
70km/h 112Watts
VTOL with 2 motors:
50km/h: 250Watts
60km/h: 280Watts
70km/h: 250Watts (do not know why)
I always measured a period of 3 seconds at the VTOL and 5-7 seconds at the wing.
Transition from forward flight to hover was successfull. But during decend from 50m the plane started doing strange movements. It was not contrallable anymore. I do not know what is maximum decending rate for this plane.
You have made a lot of progress. 
Do you still have stronger right motor connected to servo4. In that case you should have reduced servo4. Nevertheless, your wing should have turned left and not right, there is something I don’t understand. Take care to the weight of left and right wing, they must be equal.
I am not familiar with analysis IMU log. But if your oscillations were linked to roll you can reduce rll2srv_p or make an autotune. You will normally get a better result than trying to tune by trial and error.
You have something wrong with your power consumption, you can expect 50% more consumption but not 3 time more. My 1.5Kg 1m span blue wing take 70W at 16m/s. Do you still have all this electronic at the outer side of your wing ? They increase the drag and destroy the lift. But propeller is the most important, Slow fly propellers are very bad. 5 inches pitch prop is a minimum, 7 would be OK but it depends on your motor KV. I use sunnysky motors, they are cheap and good quality.
1m/s descent rate is safe but it will be always a critical moment for a tailsitter even you have the best setup. And it is even worst when the wind blow.
I am wrong it was Servo4_max which I reduced. I will correct that. So now the left motor is stronger in horizontal flight and before reducing Servo4_max it was right motor.
I would like to try Autotune but when it has oscillations like that, it is very hard to keep it under control. So I am happy when I can fly in FBWA without crashing.
Because of my many crashes I destroyed all my good propellers and now I only have left slowfly props. Now I am flying with 9x4.7" connected to 1300kV motor and before it were aeronaut 9x5". Didn’t expect that it makes such a huge difference. I do not want to try other props at the moment because aeronaut (strong) props always brake when it crashes but slowfly props do not.
Yes I still have ESCs at outer wing. When (if some day) everything works I will cut some foam and put electronics in the wing.
Hey lorbass, mind sharing your radio telemetry settings? I have range problems, 1000m would be a good improvement 
Thanks!
I found somebody that lends me some strong aeronaut 9x5 props that I could go on with testing. My plane took off, it climbed to 30 meters. There I reduced throttle and it started creazy spinning. I could not get it under control again. Even not at full throttle. When it crashed both aeronaut props broke but the plane had no major damage.
So I tried again the 9x4,7 slowfly props. With these props, hovering was no problem and transtion from vertical to horizontal flight was also successfull.
But it still turns around in a cicle (right hand). Diameter is between 100 and 200 meters. There must be someting wrong with prop mount or motors. The prop mounts are parallel and props are counter-rotoating. It flew straight forward only when pushing yaw left. I thought arduplane shoud correct that automatically? But it does not correct yaw direction in horizontal flight. When it flew straight forward the power decreased (2x).
I could do some new measurements.
Power when it flies straight forward (manually pushing yaw left):
VTOL with 2 tractor motors
30kph: 70Watts
40kph: 102 Watts
50kph: 109 Watts
60kph 169 Watts
70kph: 340 Watts
Flying wing with 1 pusher motor:
40kph: 36watts
50kph: 68Watts
60kph 82 Watts
70kph 112Watts
80kph: 143Watts
110kph: 330Watts
Now the measurements make much more sense. I think in normal flight, the plane is always slipping which inreases the power dramatically.
I could not test more than 70km/h because it was not contrallable anymore. It started to oscillate and it did not respond on my inputs. My wing (1 pusher motor) flew up to 120kph.
Transition back from horizontal to vertical flight was not successfull. I switched to QSTAB at 40kph. It reduced speed but the nose did not come up. It flew at 45 degree AoA for one or two seconds and then the nose came down again but still in QSTAB and it crashed again. No major damage thanks to the soft slowfly props.
My conclusion:
All further tests only make sense if I buy new motors, a new model that is not broken so often and add thrust vectoring. And a lot of props!!!
Here my 3DR Params.
I’m not shure if the Duty Cycle is allowed in EU with this TX Power.
Perfect, than you so much!
Incredible story, Lorbass. And a good ending!
Your aircraft is in the same size range as my FX-61 variant. Hope I can accomplish as much as you eventually.
Skywalker 6 hat 1400 mm Wingspan, 2800 gr weight.
Good luck.