Have got around to doing some maximum throttle scaling tests, a low value shows a significant improvment in flight at low throttle in my case. The oscillations are caused by the D value in the PID gain so there is quite a sharp change between oscillation and no oscillation. Hope fully this change will allow people to better tune for hover without being restricted by low throttle oscillations.
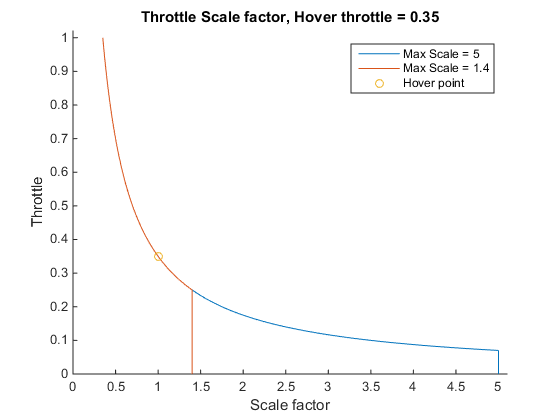
The only change is reduce the max scale value, this graph shows the difference.
I hope to add this value as a proper parameter rather than just hard-coding it and submit a PR.