@hwurzburg
I rebuilt my Skywalker 6 again as Tri Tilt VTOL with the actual FW.
In May 2019 the same Wing with the same HW and FW 3.9.8 I got a perfect Transition.
I loosed during the Transition 3m Altitude only.
Now with the new FW and the same Transition and Speed Params it looses more than 10m Altitude.
Especially when the min. Speed is reached and even with high speed.
I checked different Values (with 8 Thestflights) for the Transition Phase. All with the result of about 10m Alt. loss.
This time I use EK3 in the older Version EK2. Thats the only difference.
maybe @iampete could shed some light…I dont understand why your pitch is not tracking well during the transition airspeed wait phase…the tilt rate is way too slow for my taste…instead of 15deg/sec it should be more like 45 or 55 in my opinion…it should be setup to move to 55deg and stay there while speed mounts…but the pitch should still track…neither front nor rear motors are saturated so VTOL stabilization should be in effect even if the tilting is going slowly…its tune is not perfect but good enough to my eye…
Pete?
The max is 4500, your using about 2500 so 55% in normal flight. So much is outside the range of auto-trim, so you might have to do some manual trimming first. Once the elevator is back in trim you should find transitions much better.
@iampete , @hwurzburg
Thank you for your time to analyze my issue.
So far I made 10 Test Flights to solve it and I’m confused because three years ago I got perfect results with the exactly same frame. After the crash as Tailsitter I replaced the fuselage and use a new FPV System. (SIYI HM30).
Please looks at the Video and the Log of the Setup 2019, Test 53 with FW Version 3.9.8 and
you will understand why I’m not happy with the actual behavior. Only 3m loss of Altitude after Transition.
Video: Skywalker VTOL Test 53 Transitions in low level - YouTube
Log: https://drive.google.com/file/d/120jjV6KIs9LKq-CnPFN_OxCh2hTVmRdY/view?usp=sharing
The CG is at the same point according to the manual.
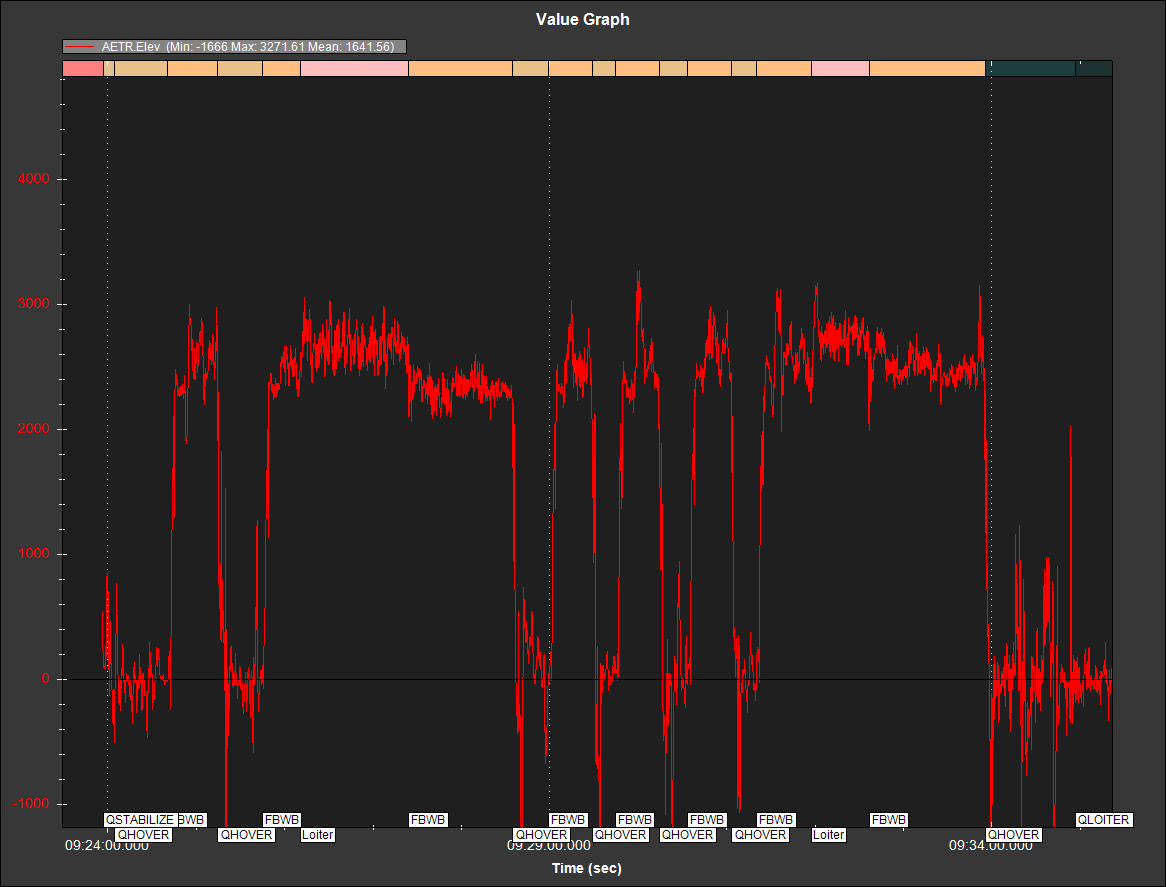
AETR.Elev was better = Mean 1999
Trim 1500 means for the Elevons flat as the profile, 1600 = 10° Up.
What do you mean with Trim, Autotrim?
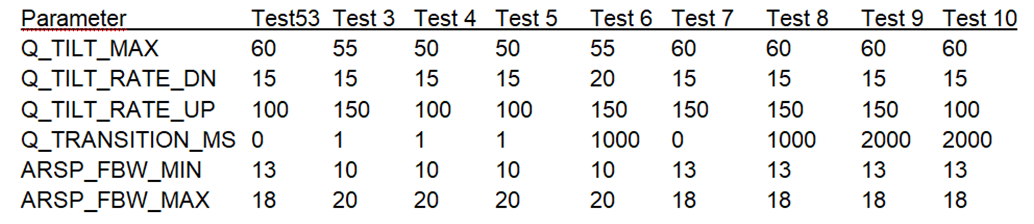
Based on this, I tried different Transition Parameters.
For Test 10, I set the Motor Tilts for the FBW Position 5° higher to be parallel to the chord.
AETR.Elev and Alt loss is better but strange the Pitch in level flight also 5° up at same speed and no climb. (Setup 2019 ist was at 0)
I think Q_TRANSITION=2000 is wrong for a Tri Tilt.(Crazy speed up after Tilt down?)
The main Alt.loss is when the Tilt Units are fully down even the speed is higher than FBW_MIN.
And no heavy reaction of the Elevons.
With all this experience the only guess for this behavior is EK3 instead of EK2.
Do you have another ideas before I step back 3 years to load FW 3.9.8?
It would make fun to fly with this wing with all the possibilities of ArduPlane. (Weathervaning, Q_Asssist) The Backtransition is perfect an a short stop possible by pulling the Pitch stick.
But as we now: Never change a running system. (as it was 2019)
Servo auto trim will do its best to get your trims right. But its only allowed to move the servos within the middle 40% of there travel. So you might have to change the pushrods or move the servo horns manually.
EK2 vs EK3 will not cause the issue.
Lets get one thing right at a time, get the elevator in trim and then we can have a look at another log and see what else it needs.
Yeah, move them up a bit manually and then fly round with auto trim enabled for a while. Check the log to see that its needing much less elevator in normal flight.
@iampete
The wather was better than anounced.
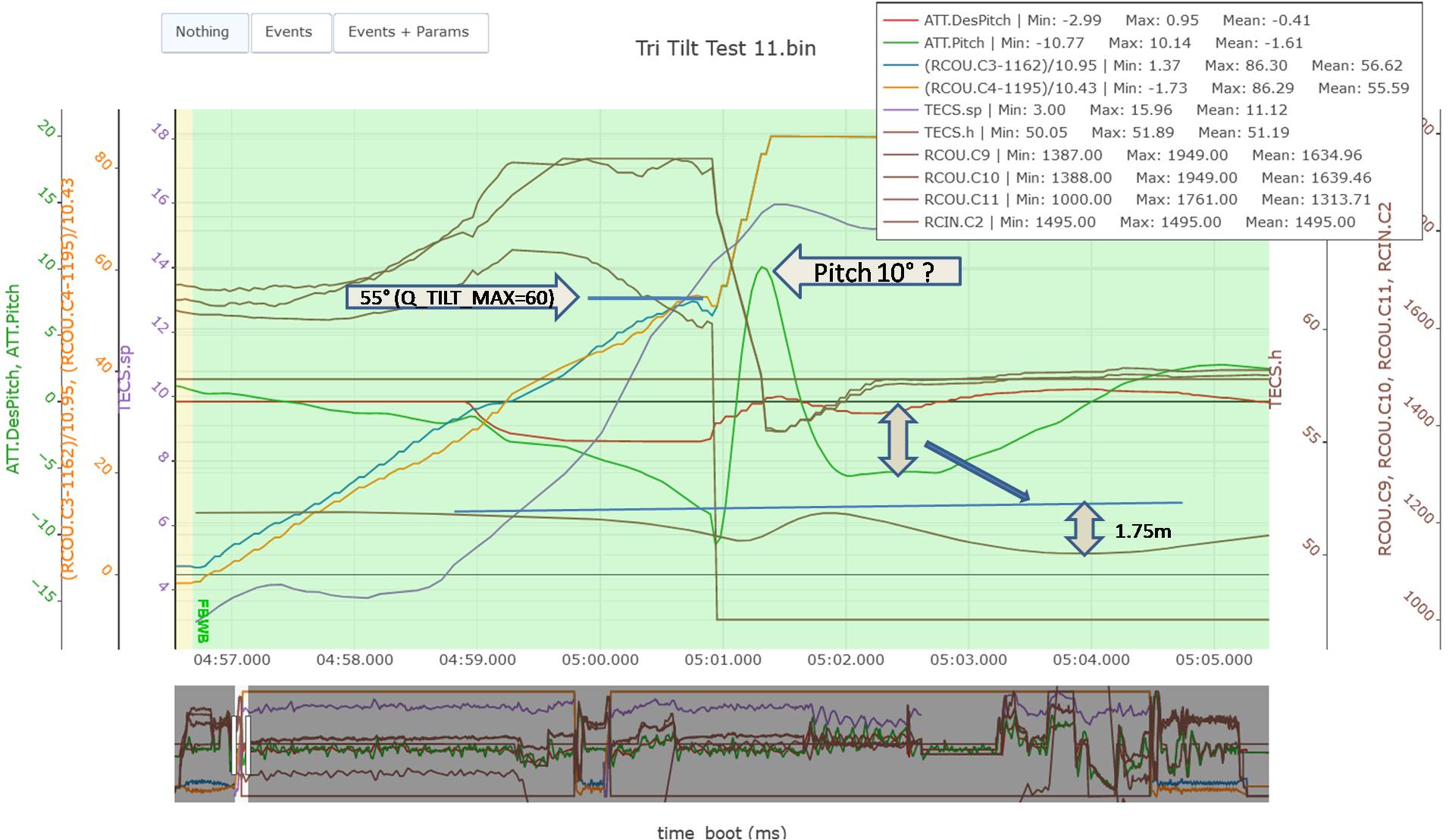
Here the Link to the Log of Test 11. https://drive.google.com/file/d/127--OHH9tgRADyXz-s3yM7x-9aDKcfnK/view?usp=sharing
Elevon mecanicaly 6° up. According to Servo1_Trim (1547) needs a bit more
Compared with Test 10 Q_TRANSITIONS_MS set to 1.
By the way, Airspeed Sensor issue at Test 10, 10 kmh to much indicated.
Some findings marked on the pic.
First Pitch down probably due to the saturation of the Front Mots.
Pitch up Peak may be uncoordinated Thrust of Front and Backmotor
Second Pitch down much better but why because even enoughe speed.
That plane did fly but it was fairly unstable during descent. I wouldn’t recommend a delta wing without vectored thrust, it just never has enough pitch control in hover. I’m building a non vectored flat wing and expect it will be better.
Quick question and apologies if this is not the right place. I have a pair of HobbyKing GoDiscover wings (an old foam delta) lying around and thought to convert them to a vectored tailsitter using a Pixracer and some 3D printed stuff for the fuselage. I am now at the first step, which is figuring out what motors to order. The wings (both of them, including servos) are approx 400 grams with a 134cm wingspan.
I am guesstimating a TOW of around 1 kg, though it will depend a lot on choice motors and battery. Based on this, I am also guesstimating a total max thrust of around 1.5 kg or thereabouts but not entirely sure what is a comfortable thrust to weight.
So, the questions, what are (should be) my design considerations? Screaming, high RPM, short props, close to the fuselage? Laid back, more quiet, long props, way out there towards the wing tips? High / low KV? High or low battery cell count?
Personally, if I have things right on my head, I would tend a bit more towards longer, slower props and higher forward flight efficiency at a (reasonable) cost of manoeuvrability. However, I am really at a loss of how this intent would translate in numbers in this case.
use longer props and place them further from the leading edge, use longer tilt mounts…I would put them about 1/3 span (LGTM)…I would tend to go more for 2:1 thrust so hovers closer to 50% (thrust is not linear with throttle % but close enough)
here is an example in that class range C1 Chaser TVBS Conversion Instructions
Not sure if this is the proper way to start a new thread.
I have been testing a dual motor (non-vector) tailsitter for over 1 year, but failed. Main problem
is when both motors are rotating in tailsitter mode , only 1 control surface responds
INTERMITTENLY and randomly when I move the elevator or rudder stick. Sometimes both control surfaces move very briefly. Param attached
I am using CC3D Revolution as FC. Not that my setting for servo 3 and 4 is 77 and 78 (for elevon left and right) in MP. But the setting for some guy and also in Wiki ask to set to 73 and 74 (for throttle left and right). I just wonder how does the latter setting achieve elevon behavior ?
Pls offer any help to solve this 1-year long issue. Thanks
params look okay on a read thru…unfortunately that autopilot has no logging capability…so more help is difficult to give…if you put it in manual mode do the elevons work correctly and if in FBWA try to stabilize the plane?