Actually some more details here where I shared the files; TVBS Nano Drak VTOL conversion by appelm - Thingiverse
Hi,
I discover and test the 215MG servos, 2 years ago, in my first VTOL :
")
As reported the Telemetry of the 4in1 ESC DShot BLHeli32 from Velox did not work.
Now I got another one: Tekko32 F4 4in1 50A ESC,BLHeli32
And again the Telemetry does not work.
Configuring with BLHeli Suite32 via Passthrou and the Function as ESC are OK.
I tested the Pixhawk with 4.2.2 and an older Wraith ESC as shown in the Wiki. With this the
Telemetry works but not with the newer ESC’s. Wraith is no more on the marked, instead now
in the shop of Holybro, here:
It seems, ArduPlane is no more compatible with the actual FW BLHeli32.
hey everyone, im tyring to build a dual motor tailsitter but in Q_hover mode it is not hovering either it will go up or down according to throttle inputs , i attached my param file please can anyone help me out
taisitter today data.param (20.1 KB)
hello sir can u share your param file i need to crosscheck with my param file , i m also working on dualmotor non vectored tailsitter
Each Taisitter (depending on its design, aerodynamics, weight, profiles, etc…) requires one personalized setup. I do not advise you to restore parameters between different models, this is the fastest way to crash. It is a better idea to calmly read the Arduplane documentation about Tailsitter tuning, in this way you will experiment, test and most importantly, lyou will learn about the behavior of different parameters and you will know with more certainty what to do when something fails.
as you mentioned sir im doing the tunings the major problem what im facing is in Q_hover mode the vehicle is not hovering at 50% throttle either it will ascend or descend according to throttle input can u suggest some parameter for it
for reference i need the param file just to check where im going wrong sir
test Q_MHOVER_LEARN=2
This way it learns the throttle midpoint to stay alt
I tried with the Q_m_hover_learn =2 no progress its same
hover throttle learning only occurs with NO attitude changes…if you are moving sticks in QHOVER or there is wind in QLOITER (the two modes you can learn hover throttle in) it will not learn the hover throttle…that is because if the aircraft is leaning its applying more thrust to stay at the same altitude…
If you have not solved, this should help.
This yawing is caused by thrust imbalance even after ESC calibrated. Plane yaw controller tuning can solve. In my case I set below.
YAW2SRV_DAMP 0.020000
YAW2SRV_INT 0.900000
more likely its thrust miss-alignment…it has to be precise or at the lower airspeeds, before the airframe’s yaw stability ramps up, it will cause serious yawing…you see it start at the transition complete stage where the VTOL stabilization no longer compensates…thrust imbalance can also be a factor, but I personally have found the thrust lines are more important…you will notice a slow yaw creep in FBWA also due to misalignment of thrust lines, but it dramatic at low airspeed…I have had to shim the motors in several TVBS due to this
Thank you very much for your reply, I will do a test with your parameters
hello everyone … i wanna make dual motor tail sitter of simple fixed wing . with ailerons elevator and rudder … how do I perform wiring of both motors on pixhawk @ main aux. kindly guide me please i am newbie.
set the motors to the servo_functions left throttle and right throttle…btw, it will not perform well unless the control surfaces are big and get direct airflow from the props
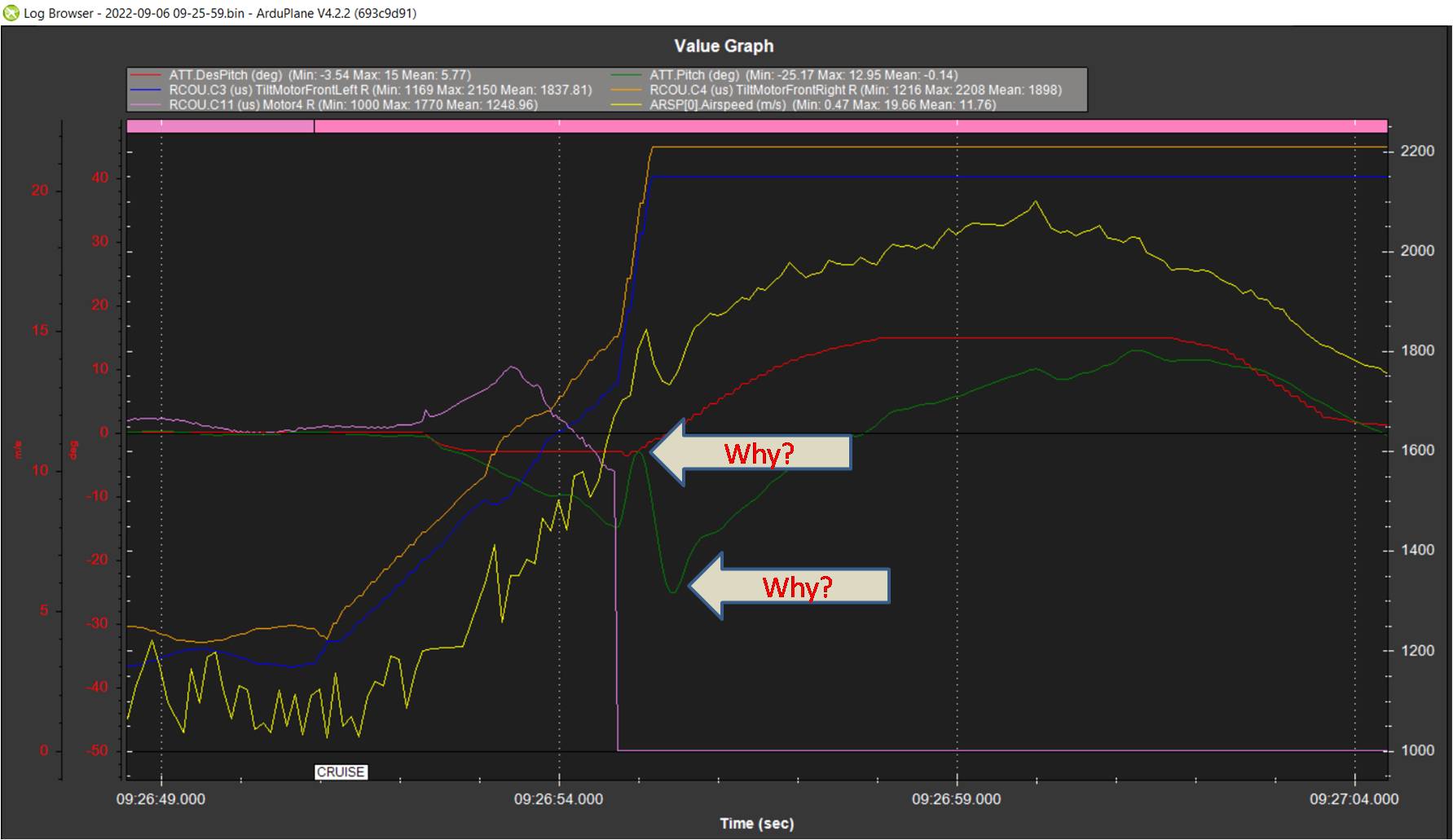
I rebuilt the Skywalker 6 as Tri Tilt VTOL.
The Transition is verry ugly. After sped up it pitches up and down(green line in the diagram). And I found no reason in the log.
I’m shure a Dev would not be satisfied with my result. But where to tune it?
The Backtransiton is good.
Log:
https://drive.google.com/file/d/11Z49wW6acD4IwtFs_7xq3m3Knp_tqAzH/view?usp=sharing
Video: Edit! Tilt Position in the Gauge wrong, needs to recalculate.
Deleted: https://drive.google.com/file/d/11aNCKwK6akmz1oJELV-jRIQ3SQ9nTlPt/view?usp=sharing
New Video: https://drive.google.com/file/d/11c-gtDrRC-jPkmB22oPHEN2ioQ6V8ZiD/view?usp=sharing
The target of this flight was Autotune, but may be not verry succesful due to the active assist speed.
Kill switch or lidar? ![]()
kill switch, we are testing with ragefinder but it still does not work ok in all conditions.
I made fixed wing dual motor tail sitter .
I was testing qloiter , I armed and give a small amount of throttle for spinning props, when I put down one side that side motor spins to balance the plane . The issue I am facing that one motor responses very quickly and other one is responding very lately . Is this behavior is normal or both motors should response quickly …?
Kindly guide me what parameters should be applied .
I hope someone will understand and answer me.