I rebuild the Skywalker as a Tilt Tri VTOL as long ago now with the actual FW 4.4.2
But now the ESC Telemetry Data no more are to see in the Log or MissionPlanner connected via USB.
I use the same BLHeli32 Params as with FW V3.9.8 and/or recommended in the Wiki and the same FC Pixhawk 1.
And tried 2 different ESC Products, Serial5 and Serial4
At the Serial Inputs the Signal is to see with a Oscilloscope.
The Motor is reacting normally, and the ESC can be configured with BLHeliSuit32 V 32.8.1.2
This are my ESC’s:
Thanks for the answer. Yes, I forgott, the Tekko shows No signal at the Tele Output.
I tried to load a new FW but it did not work.
Therefore I tested the old single ESC and this shows a rectangular stream of 3.5 V.
Edit:
It is the 4in1 TMotor ESC with Firmware Heli 3.8 which has no signal on the Telemetry Out.
And in the specs. nowhere is described it has Telemetry. There is a pin of the connctor marked
“Tele” on the board only. So I assumed it has Telemetry.
In the meantime the Telemetry works with the Tecco 32 F4 but NOT the TMotor Velox.
I think you just need to zero out the SERVO_BLH_MASK and use SERVO_BLH_AUTO=1 and motor 1 (function 33), 2 (func 34), and 4 (func 36) will be set with Q_M_PWM_TYPE and use one of the DShot settings…SERIAL4 looks to be setup for ESC telem…
ps I have never used ESC telem myself…just going by what the wiki says…and ESC telem is under the BLHeli section of the wiki…
@hwurzburg
Serial4 is now instead of 5 because I supposed 5 as defectiv.
I tried Auto=1, Mask=0, Q_PWM_TYPE=4 (DShot150), Servo_BLH_OTYPE=4(DShot150)
It won’t work.
But with FW 3.9.10 it worked with the same Params, Pixhawk and ESC until I changed to Tailsitter with newer FW.
The reason to get Telemetry is because I want to know the temperature of the ESC. I remarked they become verry hot when installed in a fuselage even when charged with 25% of the indicated Current. Mostly the actual ESC’s are used for Quad where they are cooled by Props around it.
As next I will step back to 3.9.10 with old Params to reproduce the “success”
A Question:
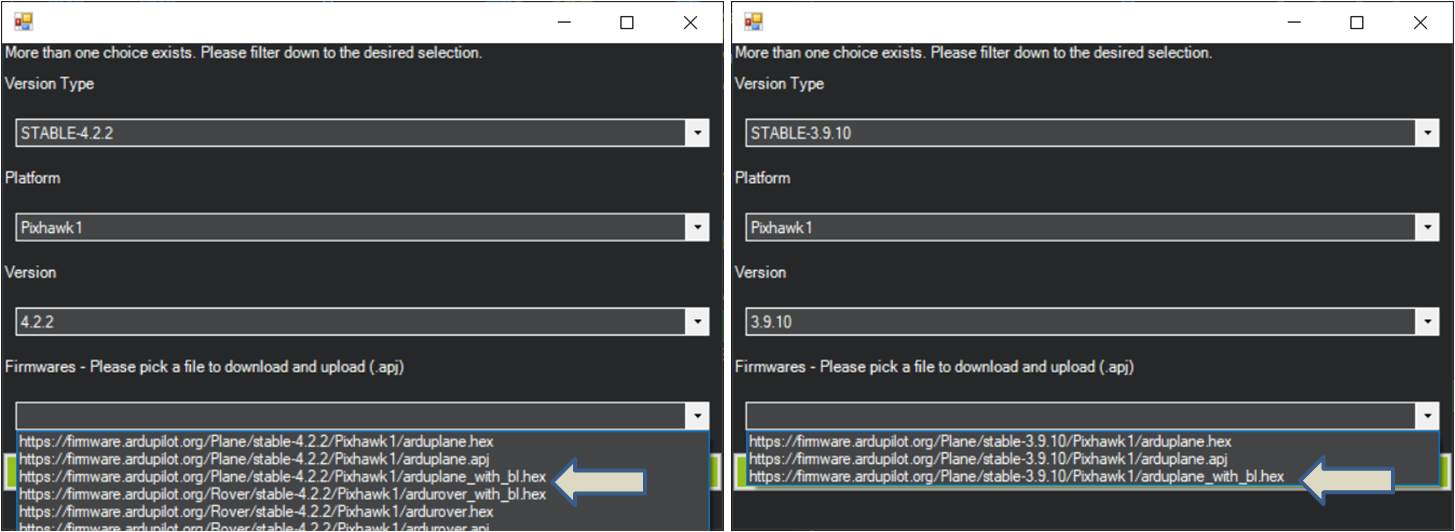
When I want to install the FW with “All options” I found Versions wiht the Ending with_BLH.HEX
is this Options needed to get the Telemetry and how to install?
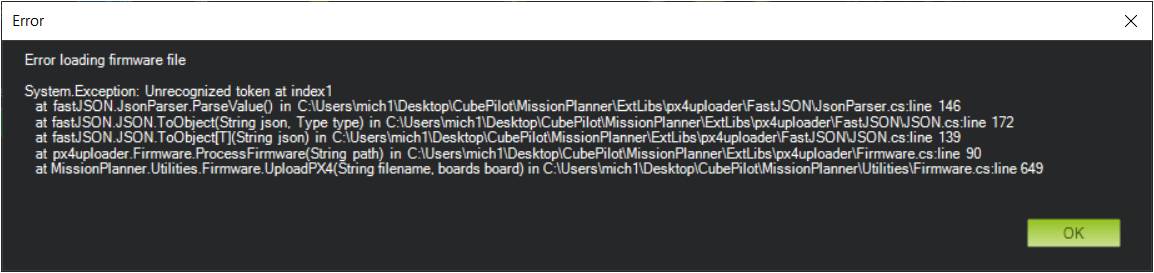
When selecting the .HEX File I got a large error message.
Today I ran into a problem that popped up and I didn’t even move any parameters. When I enter FBWA from QH, the plane’s YAW axis will rotate about 90 degrees to the left, I don’t know what happened
Hi all. I converted a nano drak to TVBS and it’s working alright except descent from altitude in qstabilize is proving tricky. It seems to lose stabilization in the prop wash. Is this a known issue or something that can be tuned? See video and log file below. Problem occurs after transition back from forward flight.
hope you were using the “flare” switch option! that gets the motors out of the dirt on TVBS fixed wing landings!
descents are always an issue for tailsitters…no matter how well tuned, too fast a descent will usually be unstable in VTOL… get a good VTOL tune and be sure the descent speeds for QLOITER/QHOVER are low enough
I have since added the landing flare switch! I didn’t expect to have to use it but it would have saved me some bent linkage and a broken servo horn. All easily repaired but I was done flying after that “landing”!
Looks like I need to work on the tune some more. Qstabilize is smooth but it’s not well tuned in qloiter.
Your drak was the inspiration for this! I think I need to do low altitude transition back to hover so I don’t have to descend far. Will take some practice.