Hi Satoru,
I try to find the time for test this method.
Can U please precise the exat version U use , exemple : V4.3.0dev / e9426b2f
BIG BIG THANKS ! for your help SATORU
Hi Satoru,
I try to find the time for test this method.
Can U please precise the exat version U use , exemple : V4.3.0dev / e9426b2f
BIG BIG THANKS ! for your help SATORU
Hi Lorbass,
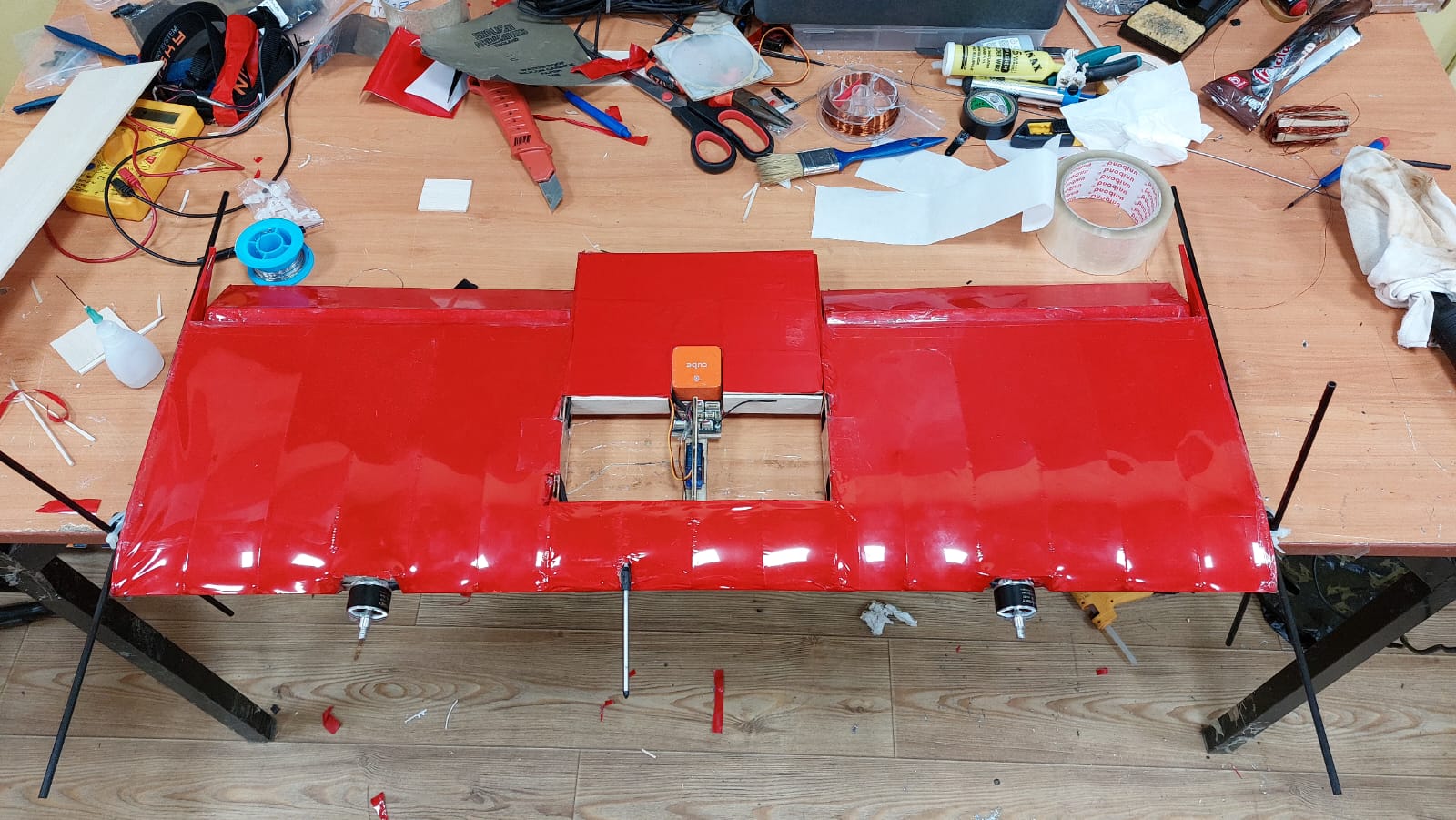
After check your videos, I remark some fragility of the build, my impression is, the structural solidity it’s not at RDV, , I thihik, it’s very important, some models are very elastic and this elasticity can generate the errors for interpret the information from the sensors and send a smuth reaction to the tilt servos .
Maybe it’s just a impression
From my part, I sugest , when you use models like Caipirinha to cover some parts of the wing, exemple, the back side with one sheet fiber or carbon fiber ( Tissu en Fiber de carbone véritable 3K 200gsm, haute résistance pour remplissage de Sandwich 1m de largeur x 1m de longueur | AliExpress ) + epoxy glue for renforce the solidity between the tilt sero/motors supports
I assume, this is a Skywalker X6. Have you seen my poste about my experience with QLoiter some postes above?
In oposite, my Skywalker was tuned and Modes Stabilize or QHover worked perfect.
Not only for this re-setup, also during 25 flights 3 years ago with FW 3.9.2 to see here:
But now with FW 4.2.1 (or 4.1.7) after lane switch 1 it started shaking and lost control in QLoiter.
Similar behavior reported by @losawing
Therefore, I recommend not to use QLOITER, must be a bug.
Hi @melc, that plane had ArduPlane V4.2.1 (54a5bd00). I think I read it works with 4.2 or later (I cannot find where, the doc says nothing) so it should work with your version.
Good luck!
Yes, this is a Skywalker x6, thanks for the guide.
I will follow your post to absorb the experience.
As you said, QL mode won’t be enabled?
As posted, 3 years ago I made 23 Flights with this setup. Then I changed to VTOL TriTilt.
And now I rebuilt this Bellysitter again. After 17 Tests, I tried the first time QLOITER, just
to complet to test all Modes. Before I never used it because I allways made Transition from QHOVER to FBWA, FBWB or Cruise and Backtransition to QHOVER. So QLOITER was only good to destroy
the complete fuselage and to dig out some sugar beets.
Just to compare, here my last Params.
From Log Test 9.param (20.3 KB)
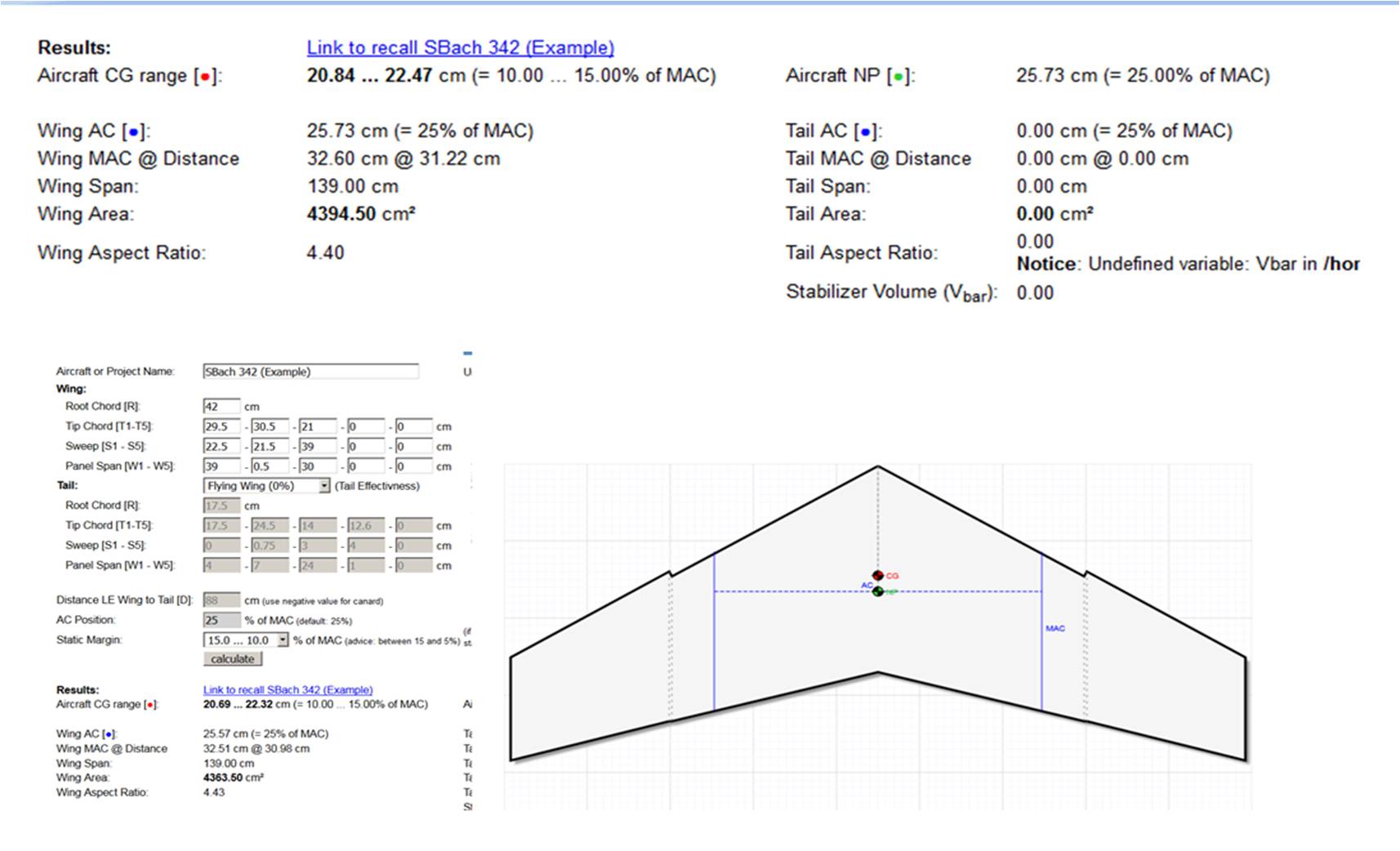
And here the calculation of the CG for Skywalker X6 Frame with the program ecalc.ch
Just to be clear. There is no bug in QLoiter for tailsitters. It works just the same as it does for all other quadplanes, and with a good tune it works fine for tailsitters.
However, Qloiter will expose a bad tune more than other modes. The default position controller gains are probably also too high for some vehicles. If your having problems first check your tune is good in in Qstab and Qhover. If there are still issues reduce the position controller gains.
Especially the Q_A_ACCEL_x values…I find that my vectored tailsitters need those reduced by 1/2 to 1/4…probably the jerks could be lowered also…
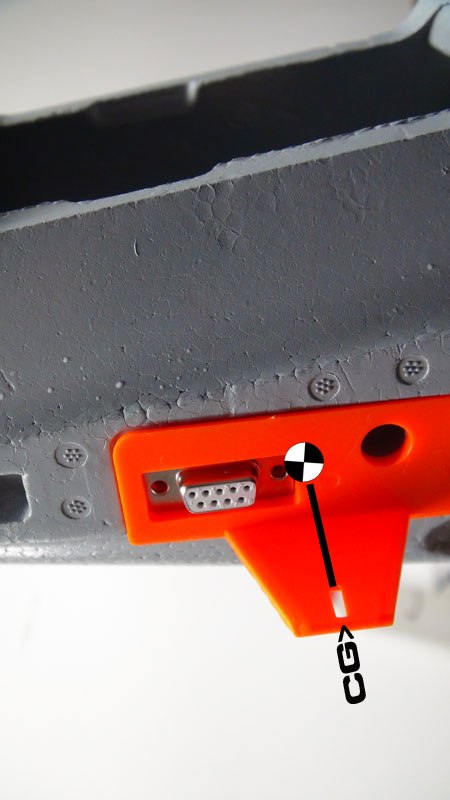
The CG is measured from the front-tip of the wing. The design is without fuselage.
But this is important for plane flight only.
I have another picture for this.

Today I did a debugging, in QH mode, when pitch_p=0.25, it shakes a lot.
When pitch_p=0.2, the shaking is slightly smaller. When pitch_p=0.15, the aircraft flips over directly. I don’t know what is wrong.
By the way, I started FFT and INS_HNTCH, I don’t know if this is the effect
I don’t know why I can’t upload logs through google drive now
Today I lowered P and I and got very good stances in QL and QH.
And turned on the FFT and filter, ran the lua script, and quickly adjusted the roll and pitch parameters, but I feel that although the overall flight is good and the aircraft is stable after the adjustment, there is still a small degree of vibration.
What confuses me is that I don’t think after auto-adjustment achieves the stabilization effect before adjustment .
I’m sending two logs .
23 is before tuning, 28 is after tuning
23log:https://drive.google.com/file/d/1PTbaj2RbTNF7-dI_AnCvQcpUAc8mvt_2/view?usp=sharing
28log:https://drive.google.com/file/d/1VwHt-c5-1y2zALcn8EWY-f62fax8xL53/view?usp=sharing
First your logs do not provide enough information to do an analysis…in order to assess attitude stabilization quality you need to do the following:
that will show how well the rate and attitudes are tracking before and after the tuning script
and what P and I are you talking about? LOIT pids or RAT pids? and which axis?
and are you talking about position hold or attitude stabilization?
the only time you weren’t moving the sticks in the last log was when you were pirouetting close to the ground and it hold position very well then…
if you really want to asses position hold…let it sit in position with hands off the sticks for a while like the first one…to me the position hold during the pirouette was better than the 20sec hovering at alt in the first one…
I’m sorry for not expressing clearly, I lowered the P and I of pitch and roll according to the previous situation, I think it should be the speed loop.
My subsequent tests were all conducted under QL. After adjusting the parameters, the plane was on the pitch surface, shaking the joystick for a few seconds and then returning to the middle. It took about 3-4 seconds to stabilize, but my brake delay was 0.5 seconds, don’t know what caused it
I will continue to test the performance under QH
@losawing @iampete @hwurzburg
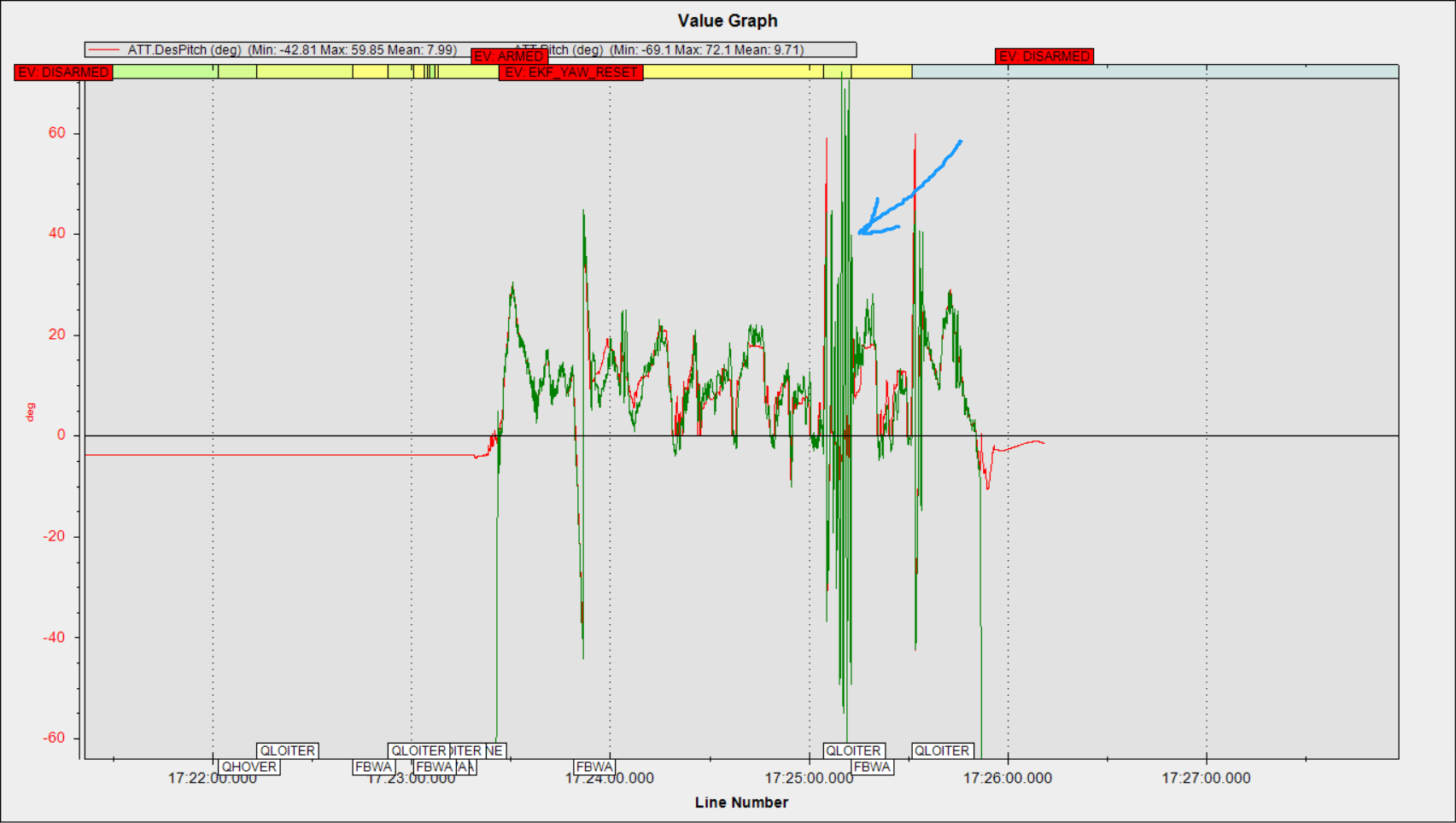
You remember the Crash of my Skywalker X6 whil testing QLOITER.
The issue is now clear it’s not the FW.
In the pic is to see, that the wing flies downwards with full power with Motor Tilts direction forward.
In opposit to RCOU for the tilts controlled upwards (Direction belly in this attitude)
The reason is a BEC failure. The Log shows BAT 1_Curr peaks max 2A while the max Current of
the UBEC from HOBBYWING ist 3A max 5A.
On the bench the Voltage drops with a charge of 2.2 A after 2min from 6V to 2V witch is not engoughe
to power the Servos.
Today I tested entering FBWA from QL for the first time. I think it is relatively smooth, but today I encountered the following two problems:
log:https://drive.google.com/file/d/1T_Npo-KN-4GqOiYd1EXdf2PNj7RaL0E-/view?usp=sharing
video1:

video2:

Looks like a exciting case of roll/pitch/yaw coupling. The pitch was bad so the motors a tilited, which means a roll output comes out as yaw.
I think your gains a too high in pitch and yaw.
You have lots of travel on your tilt motors, you can reduce Q_TAILSIT_VHPOW it should help. It is a deliberate none linearity to allow the belly take-off. Reduce it until your motors start to no longer point up when disarmed. There should be just enough as is needed to get the servos to there limits but no more.
You could also try setting up the disk loading based gain scaling, it might help a little. Its only used on the control surfaces so on vectored vehicles it is not so important.
Hi, i am trying to set up my non-vectored dualmotor tailsitter. I have tried several first flights in QHOVER mode. Mostly i have problem with my elevons. I have followed the ardupilot documentation about servo functions. But still i can not be sure of some parameters. Especially Q_TAILSIT_INPUT. What parameters would be right for kind of a tailsitter of mine? I would appreciate if you could share a complete parameter list. You can see my list and the photo of my vehicle below. Thank you.
Dualmotor-nonvectored-tailsitter-params.param (20.3 KB)
Q_TAILSIT_INPUT is set according to how you feel comfortable flying in the VTOL stance in VTOL modes…if an experienced 3D plane pilot, then setting it to 1 keeps all controls in body-frame, as if you were still in horizontal flight and sitting on the plane…leaving it at zero (default) keeps all stick movements in earth frame…ie right stick tilts the nose from vertical toward the right, left rudder rotates the plane counterclockwise…just depends on your preference…
btw, most non vectored tailsitters have a LOT more elevon area (30-40% of wing chord)…it may hover in still conditions okay, but it will not have enough control in disturbances, extreme attitudes, and especially when descending…
Hello to everbody!
I have a Duo Tailsitter with Vector Thrust and I know that the Q_TAILSIT_VHGAIN parameter controls vectored thrust in hover, but that parameter also helps for the transition from Qstab to FBWA?
I know that the parameter “Q_TAILSIT_RAT_FT” is how much pitch angle is going to have from Q to FBWA to achieved the Q_TAILSIT_ANGLE , but sometimes not achieved because I have a large wing suface and I dont have a lot of autority in pitch. But once the VTOL transition time is done, I manually with the RC help to have a good transition.