@lorbass
sorry for the crash, this is a bad one.
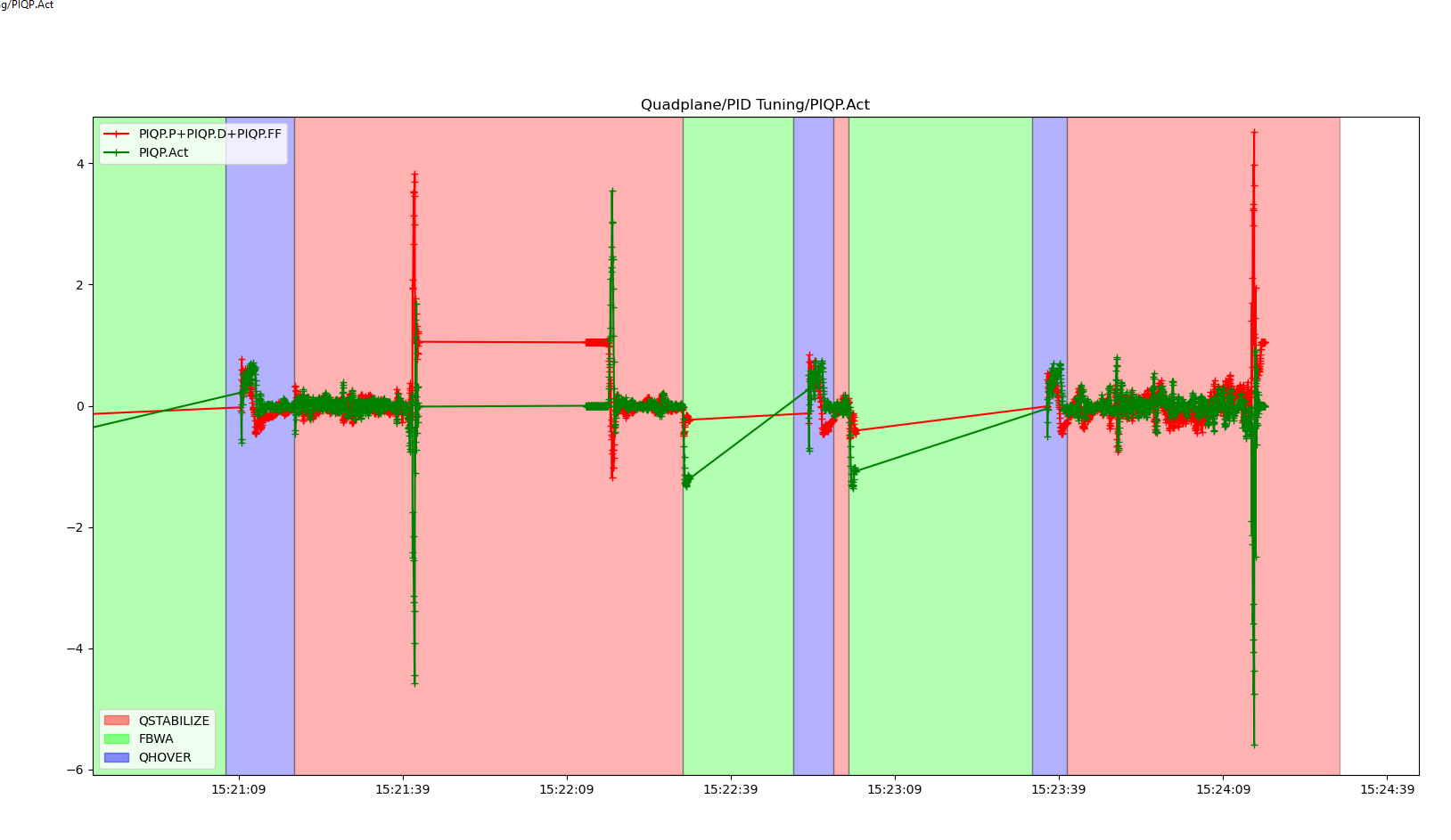
For this flight, you set q_a_rat_pit_ff to a non zero value (like I do) and the the instability is more bad.
Something I had observed in my log an offset of tilt motors that come right after the lane switch (or the yaw reset). But I don’t see a such offset in your log. Nevertheless I am wondering if the pit_ff is effective or not depending on some circumstances ? @iampete@hwurzburg@kd0aij is that possible ?
Your images looks like a non vectored Tailsitter.
My Caipirinha didn’t work, even with Elevons 20% larger than in the original.
When reducing Trust e.g. to lower the altitude, it became uncontrollable.
I changed to a vectored Tailsitter after Test 3.
Hi Everybody,
In the last week-end, I just finished a big step of my last project → Convert a Calssic Ritewing Dark Wing to a VTOL model, make some tests and proceed to maiden of the new Tailsitter TVBS (Twin motor Vectored Belly Sitter )
The final tuning it’s not finished, but, the result it’s not bad
If possible, I need some help for fine tune the PID for each axis + translations
For tuning, you should take a look at [new tailsitter tuning wiki] (Tailsitter VTOL Tuning — Plane documentation) if not yet. Also new quick VTOL tune lua script is nice, will tune tailsitter well. Since you have H743 FC, you should be able to run that Lua script ok. It works ok for me on SITL SIM, about to try on real one.
I would tune FF manually following the wiki page, then run quick tune to finish. I read the LUA script will not update FF value if not zero.
Hi and Big Thanks for yours support @Satoru_Sasaki : I try as possible, the Lua script method / VTOL QuickTune. @lorbass : Sorry, don’t understand the danger with the Mode Qloiter, please , possible to precise more ?
Best Regrds
no log file attached…may have to laod it on a file hosting site like Google Drive or DropBox
if the plane fixed wing CG is okay, having those components forward should not matter…your vtol thrust is forward of the CG…once a log is available, we can also check to see if the compass has issues…
but LOITER is a different control loop than HOVER or STAB …its an outer loop around the rate loops used for basic VTOL stability…those inner loops must be tuned first and stable first…and then you can work on LOITER…
from the logs the q_a_rat_ptch_ff should be 0.4 the q_a_rat_yaw_ff should be 0.3 and the roll P gain q_a_rat_rll_p could be increased to 0.3…this should give you the starting point…follow the guide…set the notch filters…then tune the pitch, roll, and yaw axes in QSTABILIZE…then check the QHOVER…when those are solid…you can move to QLOITER…most likely for a vectored tailisitter the q_a_accel_p_max will be too high for the pitch axis…if it wobbles in pitch while in QLOITER (only after you have rock solid in QSTAB/QHOVER) try lowering it by half…