Possible basic stability issue with TVBS:
While doing some validation testing of new potential defaults for the new POS XY controller in 4.1 for tailsitters in back transitions to QLOITER, I have run into a possible issue that has resulted in two of my three TVBS crashing (C1-Chaser,Z-84, and S-800 TVBS) when aggressively moving backward.
Ever since I started converting wings to TVBS, I would occasionally notice that sometimes they would wind up in a difficult to recover, high alpha, inverted forward flight while in QSTAB or QLOITER…I just brushed it off as non-optimum tuning since I rarely fly fast backwards in VTOL…but the recent crashes have made me re-think that…in both crashes, I had been in stable QLOITER or QSTAB hovers and tried fast forward movement, then fast backward…the forward portion or hold against prevailing wind was always stable and controlled, but too much backward VTOL resulted in backflip or tumble to a crash…here are the logs…one for the S-800 and one for z-84…crash is at end, of course…I do not think this has anything to do with 4.1 but might be a basic issue that needs addressing…it should be noted that both the Z-84 and S-800 are shorter coupled from thrust plane to CG than the C1 Chaser, but not by a large amount…all have thrust plane well forward of the CG
perhaps its due to how far forward the thrust plane is, or that the flying surfaces are too active in pitch while in VTOL, or ?? but this has been occurring too often to ignore…
I have had this problem only with tvbs and only with plane 4.1.dev or 4.1.beta. When I came back to 4.0 this is just fine over dozens of flights. Vectored thrust and control surfaces seems to act against each other. The starting point is always a lane switch message.
I have had a look at your log but I do not see same symptoms !!
@kd0aij, @hwurzburg
Hello,
I am currently testing the new method for automatic VTOL land in a mission (arduplane 4.1.1) on a non vectored dual motor tailsitter.
One time it goes very well, the plane automatically make its transition to VTOL then break and goes straight to the land WP and begin its descent.
But the next time the VTOL land fails because after making transition the plane goes in a direction opposite to the land WP position.
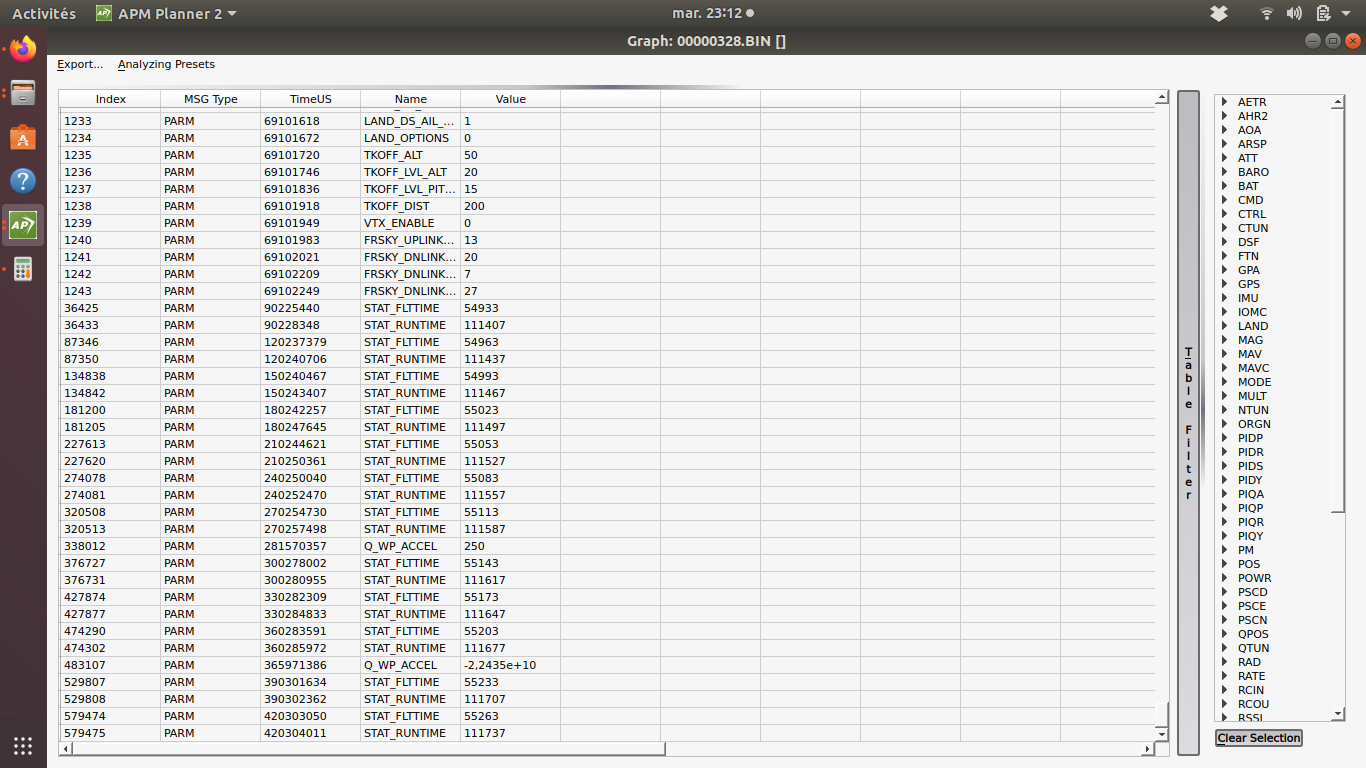
I noticed in the log that every automatic VTOL transition Q_WP_ACCEL is automatically swapped between 250 (the value I have set) and -2.24 E+10.
If someone is interested by the log I can post it.
@hwurzburg
My q_wp_accel problem seems to be related to some Q_parameter. I have changed Q_angle _max from 9000 to 8000 and the problem seems to be gone. To be To be confirmed though.
edit: confirmed in flight this evening, 3 missions with q_land and perfect behavior. I will make a video soon.
Auto mission with a non vectored tailsitter, arduplane 4.1.2.
VTOL takeoff, WPs, VTOL transition, WPs, VTOL land
Thanks to new plane PID et autotune I have been able to move the CG some mm backward and this tailsitter fly better in all modes. Down and up vertical speed can be set separately which is also very nice. Forward and backward transition angle and rate can also be set, this is much better than previously. The new quadplane land feature to calculate the transition location is also a very nice. I use repositioning to land side wind.
One question, with AP 4.2.1 and MP 1.3.75, what is the first WP? WP1 or WP2? Since I have updated from 4.1.1 to 4.2.1, it makes the back transition in the previous WP to HOME instead of in HOME
I have not tested RTL in a mission like you did but I tested RTL as a flight mode with q_rtl_mode=1 (and rtl_radius=30m). It that case the VTOL transition happen when RTL is triggered instead of flying as FW up to rtl_radius. Something is wrong with RTL.
The mission you see in the video is do_vtol_transition followed by 3 WP and a VTOL_land. From what I have seen the VTOL transition happen after the last FW WP at a distance from the first VTOL WP which seems to depends on q_trans_decel (the lower value the farther the transition come).
I have also successfully tested a more simple mission with FW WP and an VTOL_LAND. In that case the VTOL transition happen again after the last FW WP at a distance wich depends on trans_decel. Just be sure the last FW WP is far enough and q_wp_acc high enough.
I made more flight to test RTL (as a flight mode only) with q_rtl_mode=1.
I do not use home but rally point instead.
When rally point altitude is set to 20m, RTL works always as intended.
When rally point altitude is set to 40m, transition location depends on the altitude and distance (from rally) when RTL is triggered. I mean low altitude (bellow 20m) and short distance from rally make the transition to happen shortly or immediately.
So I believe that transition happen outside rtl_radius only if the plane cant reach rally altitude before entering the rtl_radius.
That sounds a clever way to manage RTL !
Yes, it works very well but the code still needs improvement because it causes unwanted behavior during transitions.
There will also be a marked improvement on the transitions, @iampete is working very well on this thing and the tests i am doing on Realflight are very promising.
At the moment imho it is better to avoid automatic missions and QRTL with non-vectored tailsitters, the results, even if well parameterized, could also be disastrous.
We are discussing it on Discord, in the quadplane channel, I have posted a lot of videos.
I have personally stopped my tailsitters on the ground until these improvements are indisputably tangible on the SITL.
Many things in the code that NOW are good for quadplane are absolutely not valid for tailsitters, its flight envelope is a separate thing.
OK, @marco3dr thanks for the comment. Yes, I have the same problem, the back transitions are successful, that is, it is well parameterized, except in AUTO and QRTL modes. In these modes sometimes randomly the tailsitter destabilize and oscillate in the descent phase after finishing the transition.