I set the mode to QSTABILIZE and it flew fine. Then, I loaded the waypoint mission, set the mode to AUTO and armed. It flew great (I am thinking I had the wrong config file loaded yesterday). The only problem, as expected, was with the landing. It bounced.
Excuse my ignorance, but can’t the QSTABILIZE landing logic be replicated in the auto mode?
The problem is that the automatic throttle control doesn’t know when to shut the motors down because we don’t have a robust indicator for ground contact. If it were to shut them down too soon, bad things would happen. Best workaround at the moment (that I can think of) is for the pilot to retake control during the final stage of descent.
Not sure if this question has been asked. Using the simulator (or even the aircraft for that matter), when I run a simple 3 waypoint mission and try to vtol land using RTL (Q_RTL_MODE =1), the plane climbs up to about 50 meters regardless of Q_RTL_ALT=15, Q_RTL_ALT=15 as it transitions to vtol and starts landing. And, the transition to vtol is very violent and unstable. It eventually lands. I am using the black letpi params with only Q_RTL_MODE changed to 1.
I hope not to be wrong, please check q_wp_accel parameter
I think the normal RTL behaviour when q_rtl_mode=1 is to make RTL at alt_hold_rtl until rtl_radius and then make VTOL transition.
Is it possible to use a rangefinder to know exactly when to shut the motors when landing a quadplane? I noticed arducopter has precision landing, but I was not sure if that applies to our model.
I don’t think quadplane can use the precision landing feature in Copter, but it should be possible to add or modify the code to make use of a rangefinder during landing. But I think @iampete is working on improvements to tailsitter landings. See this discussion on Discord
For some reason, I can’t create an account on discord. It says resource limited.
I noticed multiple attempts at adding precision landing to Adruplane, but none of them is in master.
The landing part is what’s causing most crashes for me. It’s very unstable as the plane jumps immediately after touching the ground and I can’t time turning the motors off properly all the time which cause a crash!
I am interested in this topic of tailsitters and I have learned a lot from this thread.
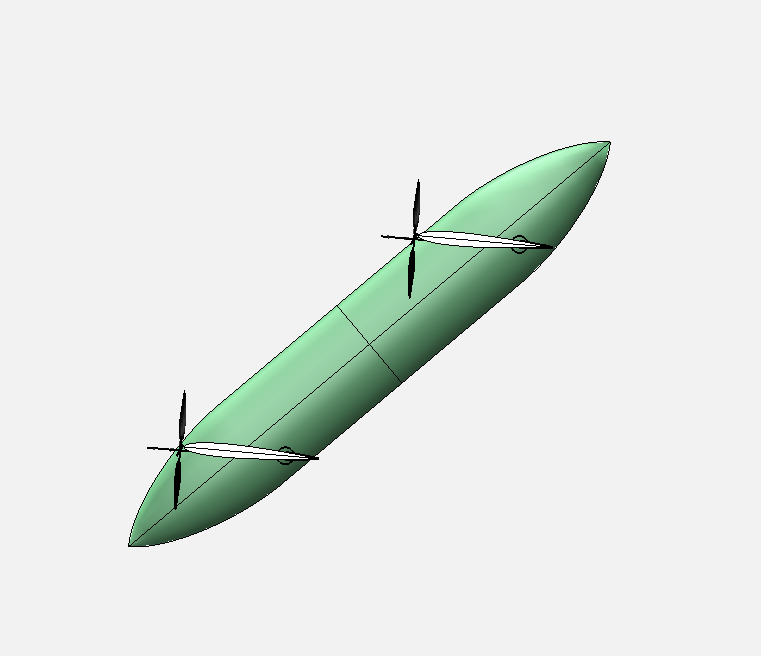
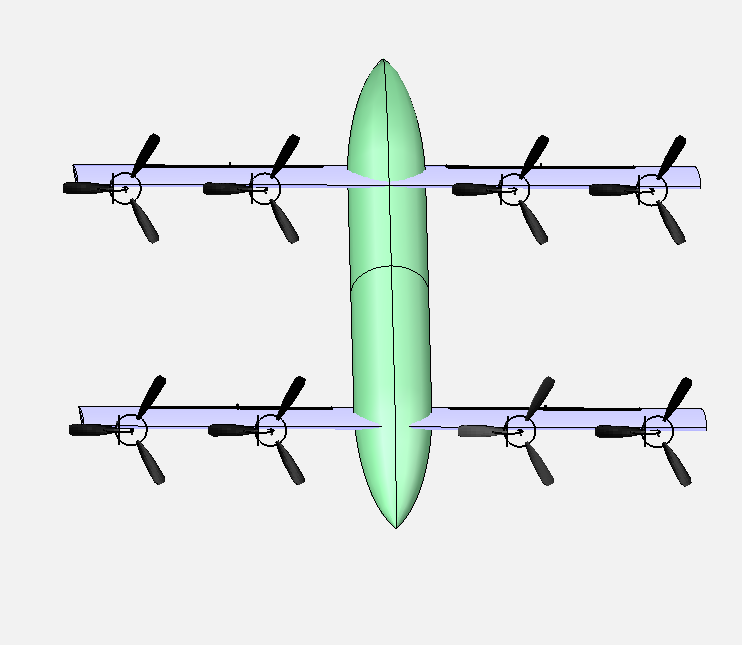
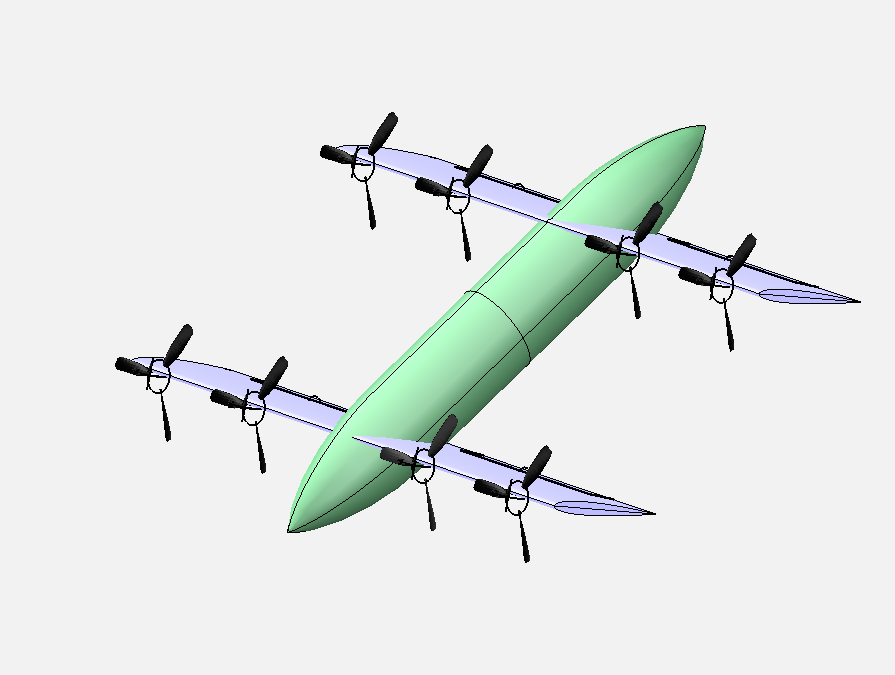
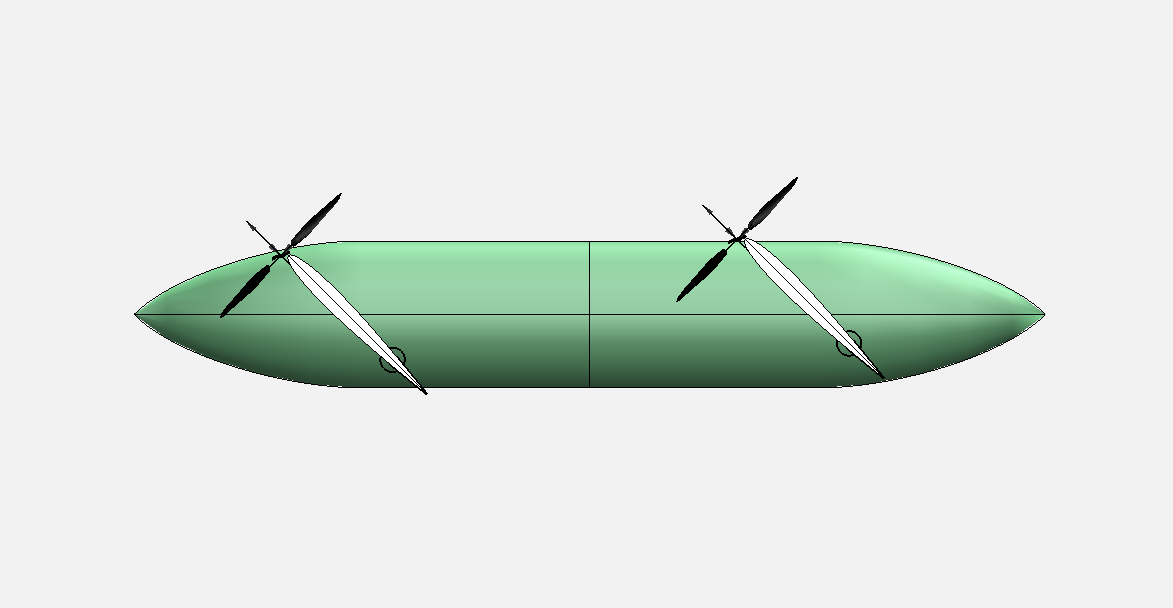
I have a question: Can I build an 8-motor tandem wing tailsitter ?
I have the Matek F405 VTOL with 11 pins out, so I want to try a quad motor configuration, where each motor is connected to another motor in parallel, making an 8-motor octocopter. It also has 2 elevons on each wing.
Will there be any PID control issues with this Y-connector setup? I would appreciate any suggestions or solutions for this.
I am working on the conceptual design phase now. I need to understand how the firmware functions before proceeding with the initial parameters sizing.
If you have any prior experience in this category, please share your insights with me.
After reading this thread I am very much intrested to test this model in the virtual environment before going to the real life flying. But I don’t know where to start.
I’m excited to learn more about simulator testing. It seems like a great way to test our models in a realistic virtual environment with physics. I don’t have much experience with it yet, so I would appreciate any guidance from someone who does.
I am really wondering how to configure this in pixhawk using arduplane. Could you please give me any data on that parameter configuration of this model?
I am very interested in learning more about this project and how you are using pixhawk to control the plane.
What are the changes i have to do if I want to use 8 motors instead of 4 motors.