To connect what (RC Link, Video Link, Data Link) via usb-c?
Yes, the display looks strange.
To connect what (RC Link, Video Link, Data Link) via usb-c?
Yes, the display looks strange.
The system menu shown in the user manual v1.2 and in @lorbass 's pictures was based on HM30 ground unit firmware version v0.1.7. It may have changed in the latest firmware.
And it may be a little different with the exact English menu in the product, because it was what expect the team to change for easy understanding. I am working on the manual update and am pushing for firmware text update.
Yes the Groundstation works on v0.1.7. What is the latest Firmware and where to find?
Please, add in the manual page 81 (Firmware upgrade steps) that the
Groundstation VideoMode has to be set to: Inter WiFi/Upgrade.
A short video to show the work needed bevor a long range test can be startet.

The near crash is not produced by a failure of HM30, it’s a not completed Param Tuning.
Awesome plane! I have been eyeing towards ZMO VTOL, but this wing is much better w/o the need for additional 3rd motor. Would you have more info about the plane used - is it fully custom, or a kit? Also interested about the motor-tilts used - are these commercially available? Thanks!
This Type of VTOL is called: Dual Motor Tailsitter (or Bellysitter) and discussed here:
It is the Skywalker X6, a Kit but I can’t find it anymore in the Net.
Only the larger brother of it exists
https://alexnld.com/product/skywalker-x8-2120mm-wingspan-white-black-epo-fpv-uav-flying-wing-aircraft-rc-airplane-kit/?gclid=Cj0KCQjw_4-SBhCgARIsAAlegrWwRyOZRcnDucFaSNJjj-o193029_6tXKral_r04wYXWk7opJJKIV0aAonGEALw_wcB
For the Motor Tilt I used Servos like this. The motor carriers are designed in 3D Max of Autocad.
Now no more usable, the Student Version is at the end. And then 3D printed in PLA.
Props 12 x 5.5, Motors kV 580, Battery 6S 4500 mAh. The wing weight 2800 gr.
Motors and Props where designed with the help of the App
https://www.ecalc.ch/index_d.htm
With this you can find a compromise for Hover and Plane Mode.
Hover= Large and slow Props, Plane= fast and small Props.
First I used DJI Lightbridge 1 until it burned. Now I will use SIYI HM30.
Thank you for the links - I found in the other thread some nice videos and STL files you posted. I have a 2m Opterra, where it might be a good opportunity to try the dual-motor VTOL idea.
About mechanical CAD software - Siemens Solid Edge CAD is available now for free for non-commercial purposes: Siemens Digital Industries Software Online Store
I have been using Solid Edge for my day job for more than a decade and can recommend it. There are also very nice tutorial videos for it to get a new user going fast.
Thanks for the link to Solid Edge. I doenloaded it and will have a look. 3 month ago
I started with Blender, also free. It’s like you know to speech in one language and start to
learn another with the same target, to communicate.
Yes, the Opterra could be a good candidate. It’s difficult to build a smaller Wing due to the weight of
the Motor-Tilt units. Servos with 180° and two axis are not available in small versions.
After the Dual Mot Bellysitter I changed the wing to a Tri Tilt VTOL. But was not happy, the back transition, until the Plane stopped, needed 2-300 m. And hovering against Wind for landing was difficult.
Now I restart with the old Configuration and Arduplane Version 3.9.5 to change softly to the newest version.
Good luck.
In order to solve the problems so far,
I decided to upgrade the firmware.
It seems that there are 3 types of bin files for the air unit.
(GD, N32, ST)
Which kind is better?
The one that does not cause the most problems is good.
Also, please tell me what you should be careful about when upgrading the version.
Only one will work for YOUR airunit. Have a look at post 332 from Risto above
Please pay an attention to the Boot Loader number for the correct firmware version to match your units.
Frank,
You should iterate: Which unit you have, you can see with SIYI Assistant in the bootloader field. First digit 0 = ST, 3 = GD and 5 = N32. You then pick the correct type of FW.
Please include this in a text file in the FW folder
Thanks to everyone, we were able to upgrade the version safely.
Thanks guys.
My receiver was 3 (GD).
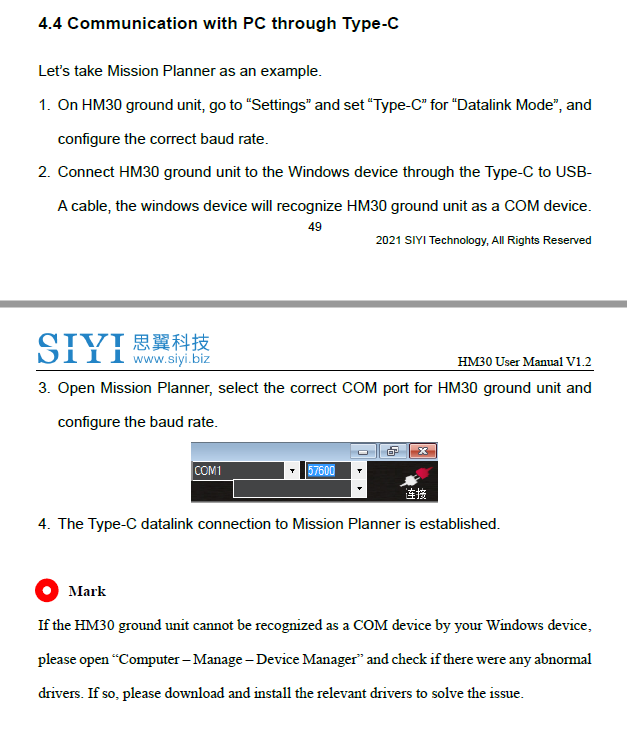
Well, the essential connection to MP using USB-C, but it doesn’t work.
The only port selection for connecting to the MP is UDP, UDPCI or WS.
Is there any setting?
Oh, I didn’t have enough words.
I’m sorry.
I was able to connect with a PC.
I can’t make an android tablet.
USB-C connection to Android SIYI FPV app can have both FPV and telemetry.
USB-C connection to Android QGC or other GCS can have either FPV or telemetry.
However, currently USB-C connection is not 100% compatible to all Android device. Looking forward to solve it in an future update.
Frustrated…
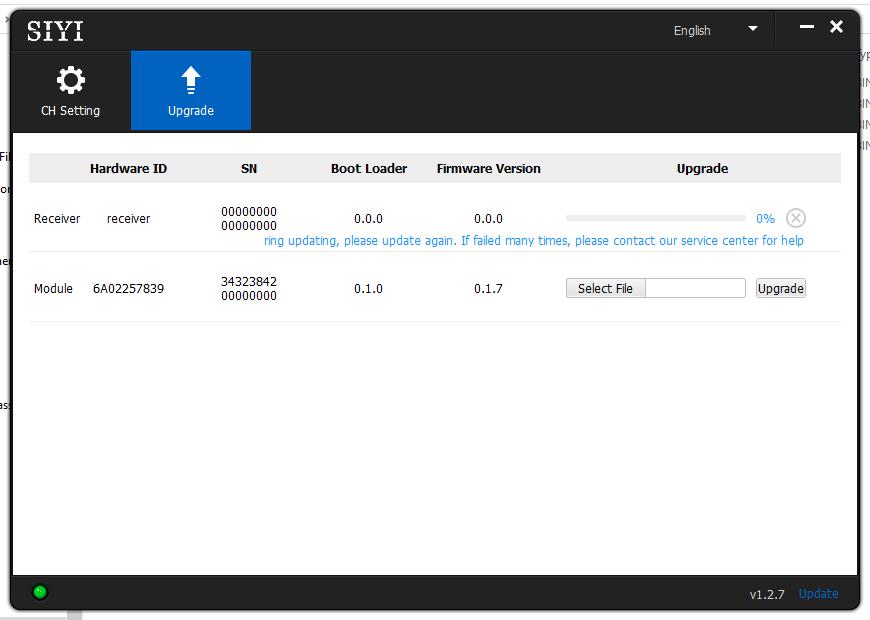
Tried to update the firmware to see if that would help me get a bind and get an error message and no firmware loaded!
Tried every way I can think of but can’t get an upload to the receiver. The module and AU updated wo/problem.
@SIYI are you ever going to release a decent app suite to update your products with a click like every decent product out there or will keep having frustrated customers trying to find their way trough 3 different hardware, countless cables and firmware to download from your google drive?
What a pile of junk you are trying to make of your product.
I really can’t understand why you don’t see you have a problem with updates the way they are now.
I would suggest a Browser updater like Agent M. It just works.
Receiver = Air Unit
In your screenshot, the boot loader of the receiver shows 0.0.0 which means there is no connection of the air unit here. I assume that you are only connecting the ground unit to PC at this moment.
If you are to update the air unit, please connect the air unit to PC alone.
If both ground unit and air unit are already updated, please check if the firmware match and try to bind.