no compass is needed any more…unless you want to start missions in vtol mode…ekf aligns with GSF after gps vel readings occur and works well from then on…you can lift off in vtol position hold modes,but it will wobble around until yaw aliignment occurs, or you canarm, walk the vehicel around in acircle until you get ekf3 active, and set it down and start a vtol mission…
I dont fly many vtol missions but just takeoff in qstab and transition to fw…can do qloiter and missions with vtol land after that
@Iosawing, the promise is a debt, after this mission flight there is any better landing. I would like to send one better video but I can not play it. I have to test Disk Gain but weather is not good.
Yes I know, my answer comes verry late.
After a long trip via Tri Tilt VTOL, Copter Tailsitter and other projects I’m back to the roots as Dual vectored.
And after reading hundreds of the last posts, I can react.
As you reported, there is a roll-oscillation with all my test flights. But without experiance in Plane I
thought this is a bad tuning.
This is the big problem with non-vectored tailsitters, landing.
Unfortunately Ardupilot for obvious reasons cannot realize when the tailsitter touch the ground in a reasonable time, the throttle drops too slowly and the flip occurs.
To avoid this for the moment I have set a switch on the tx that puts the throttle to a minimum, so here the motors are stopped, forcing MANUAL mode, so that the propellers stop as soon as possible.
It seems to me that those of the Wingtra to avoid this thing have put a small lidar on the tail.
Another idea that came to me since I mount ESCs with BLHeli s to find a clever way to activate the reversal thrust at the right time to anchor the tailsitter to the ground.
Need an advice on non vectored dual motor tailsitter tuning. We are testing a new plane with AP 4.1, flight and hover is good with default parameters. My build is AUW 800g, 2212 motor 8x4.3 props. 1500mAh 3S, Matek F405 Wing, no airspeed sensor. It hovers at about 50% throttle in QSTABLIZE.
In transition from plane to VTOL, it tends to climb too much, 10-15m, need to descend a lot which tailsitter is not good at. How can I improve?
Seems to me too much throttle is applied? I see new param Q_TAILSIT_THR_VT will be introduced in 4.2, any workaround in 4.1? Better to have airspeed sensor?
In this video, I set Q_TAILSIT_ANG_VT 45, Q_TAILSIT_RAT_VT 70.
4.1 does have some tailisitter back transition issues…they are still being worked on in the dev branch but several improvements, like that parameter, have already been merged into the dev branch…
Got a newbie question in tailsitter transition. What will happen if I continue to lean nose down in Q mode?
Will it continue to fly in Q mode or will it switch to plane? My understanding is pitch/roll lean angle is limited by Q_ANGLE_MAX and will not/should not go beyond.
Our plane is light and prone to wind, it needs good nose down if it faces to wind, which is unstable (before tuning) and it is safer to exit as a plane.
I found F405 Wing build exceeds 1M in dev branch, but thanks to https://custom.ardupilot.org/, I can build one. Very nice.
full forward stick in a stabilized Q mode should just lean at Q_ANGLE_MAX or Q_LOIT_ANG_MAX (if in a loiter)…there are certain corner cases where some tailsitters can get “locked” into pitch or yaw “leans” in altitude controlled modes, but a blip of throttle will correct them( a long discussion to explain the reasons)
I just looked at the “latest” (dev) build on firmware.arduupilot.org and F405-Wing is building normally…must have something wrong in you build setup
Thanks again for your advices! Nice to get confirmation. Also checked /Plane/latest/ at firmware site, yes the build contains new parameters. Not sure why my build is failing.
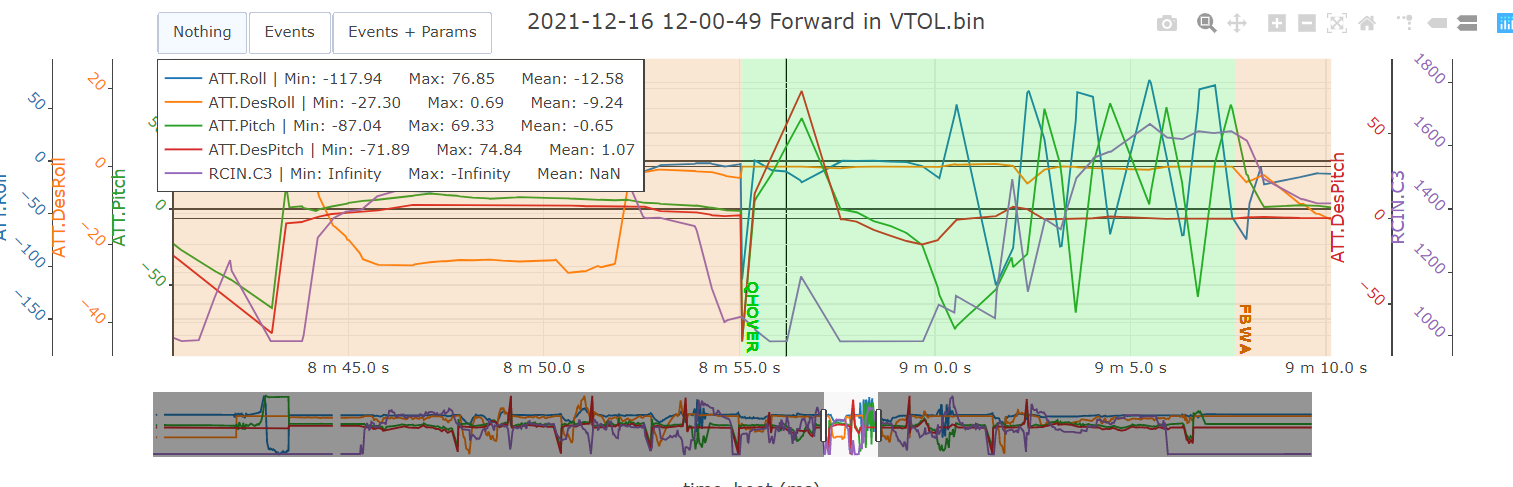
Our plane, at least my build, gets unstable/wobble/wing rock/overcontrolled in Q mode nose down . (For example at around 4:40 of this flight Forward while VTOL Tuning flight GH010069 2021 12 16 12 00 49 - YouTube, it makes complete rolls by itself.) Hoping disk theory can solve, started to test with it, also installing airspeed.
Sorry I should have shared together. This is. https://drive.google.com/file/d/12W5ETTiY9M8zLs218pDEFY9ZQC4m0ciT/view?usp=sharing
For example in attached picture, plane pitched down in QHOVER, started to roll/wing rock till I exit with throttle. This flight is under 2-3m/s wind, before any tuning, having difficulty to bring plane back to position. I need to fly more to see this still occurs with mentioned disk theory parameter applied.
well unless you have tuned it in QHOVER, you cant expect VTOL flight to work, especially for QLOITER or horizontal velocity moves…I notice you have no FF on the roll pids…being a non vectored tailsitter relying totally on control surfaces for control in all three body frame axes when VTOL, they all need FF…try .2 for q_a_rat_rll_ff
then in QHOVER do hard stick pulses in both direction in all axes, one at a time…from that log we can determine the exact correct FF for each axis ( the sum of PIQx.P,I,and D should equal PIQx.Act*the FF amount for each axis)…once FF is tuned, then you can raise D up until you see tiny oscillations, and then reduce by 1/3…then raise P up until oscillations and reduce by 1/3…should get you close…then you can check QLOITER
Potentially dumb question - is there a way to level the AHRS for quadplane mode? I have a tailsitter where the autopilot is mounted a few degrees off in yaw (in plane config) due to some uneven bolt holes in the plane itself. Fixing the mounting is obviously the best fix, but this is a quick prototype platform while I finalise the next iteration, and I don’t want to mess with the mechanics too much. I do the normal AHRS level cal in plane config, which is fine, but then when in tailsitting mode the autopilot is skewed a few degrees in roll, which is not addressed by a full or 1 axis calibration. Can I hardcode an offset like AHRS_BOARD_ORIENTATION, but just for tailsitting mode?