I had something very similar, although with cheaper servos. It was interference from the 2.4 GHz radio. Moving servo cables, or holding them in my fist changed the jitter pattern. I replaced the servos with a different brand and the problem went away.
I’ve had something like that when the servo pwm frequency was too high, I had the wing servos in the same group as the ESCs which were running at 500Hz (normal servo is 50Hz).
well, even turning off the RC system, the shaking continues.
I connect servos and ESCs in different groups on the Matek:
S1/S2 for servos and S5/S6 for ESCs.
As well SERVO_BLH_MASK=48 >>> the BLHeli ESCs are coneccting to S5/S6
I will try with other servos
Sorry, maybe this group is not the right one to expose my problem. I had posted it here because it is a Dual Motor Tailssiter thinking that perhaps some specific parameter could be the problem,
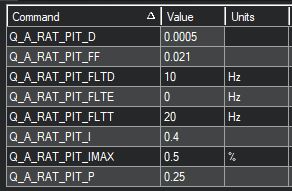
Yes, you will have to lower the Pitch D Param.
https://youtu.be/UMYpq2S20EM
I have lowered the value >> Q_A_RA_TPIT_D = 0,0005
but the shaking continues.
Hi all,
I have a new method for scaling control surfaces for vectored and none-vectored tail sitters. Hopefully this should be a nice improvement to the tune that you can achieve. By doing a better job of scaling the gains at high and low throttles and airspeeds it should allow for overall higher gains that would previously have seen oscillations at these extremes.
This is accomplished by using disk theory to estimate the airspeed over the control surfaces by considering the combination of the true airspeed and induced airspeed from prop wash.
It also fixes a few bugs that are currently in master for thrust vectored tail-sitters.
I have been testing in realflight and it seems to work quite well, I’m looking for some people to try this on real vehicles.
I’m happy to provide test builds (based on master/4.1.dev).
The is a new bit in the QTAILSIT_GSCMSK param, it should be set to 4 for the new method. There is also a new param to set the disk loading of the vehicle Q_TAILSIT_DSKLD. This is the vehicle weight in kg divided by the total disk area of all propellers in m^2. This value will end up having to be lower than the calculated value because not all of the control surface area is affected by the prop wash, you can tune it with some aggressive test flying.
This new method also makes use of the airspeed so for best result a airspeed sensor is required although it should also work reasonably well without, testing with both would be great!
2 Likes
Hey @iampete
Will this work on copter tailsitters?
I have Quad an tri TS to test if it works.
Latest version from repository = master version?
Start with Pitch D at 0.0001, P and I at 0.2, and follow the normal tuning steps.
If it still vibrates it means that you have play in the linkages.
MIXING_GAIN too high also affects this.
Yeah should work on your Tri as it needs control surfaces for yaw. Its scaling for the control surfaces so for a quad that most likely has ‘normal’ size controls surfaces you wouldn’t notice the difference, especially relative to the huge control power you get from the motors.
yes.
Ok,thanks, I will try this afternoon
With Q_TAILSIT_GSCMSK=4 & FC reset >> I cannot see Q_TAILSIT_DSKLD
You need a custom build, its on-top of MASTER/4.1.dev. What flight controller are you using?
Hey @iampete
Can I get a build for cubepurple with tri tailsitter included in the build?
Thanks.
Build from above branch for CubePurple
There are actually quite a few odd things with using the tricopter backed with no yaw servo. Hopefully motor mixes via scripting will be a thing soon and you can easily setup a 3 motor copter mix.
1 Like
Ahhh OK,
Matek F765
Thanks
So, It should work on FRAME_Class=16 too then?
I mean, QuadTS with no torque yaw.
yeah, should work. But as I say it might be hard to tell if its better or not
1 Like
You can load using using the load custom firmware button in the lower right corner of the load firmware page in the mission planner advance view.