OK, Thanks
I will load it and test it. But now I can’t fly because at least this month we are confined by Covid
Hi Marco,
¡¡¡ SOLVED !!!
I owe you a beer. Indeed MIXING_GAIN was the problem. With other servos and value =1, I had no problems but these Savox (higher torque and speed) were more susceptible
Lowering it to 0.5 solved
Thanks
1 Like
Very well, I’m glad you solved it.
Obviously with the very low MIXING_GAIN verify that you have a good excursion for the attitude corrections in Copter.
I use your own servos in my Explora and the MIXING_GAIN here is 0.8.
yes, indeed with MIXING GAIN <0.8 the tremor does not appear. in combination with PITCH PIDs.
Thanks for your help, I was swimming alone in the middle of the ocean and I didn’t see the island
Regards
Atico from Bilbao
Hello, I’m trying to do some modifications to the tailsitter code to make transitions smoother for a heavy tailsitter.
I have noticed that when transitioning from FW to VTOL, as plane transitions to VTOL mode, it will not respond to manual throttle until the climb rate gets to zero even in QHOVER mode it seems. I want to be able to control the throttle instantly after transition happens. I have tried setting new target altitude and target climb rate but it has no affect. If someone could point me out to right direction in the code I would be very thankful.
Welcome,
A change has just gone into master to set the z target to the stopping point rather than the current altitude. It is actually starts responding as soon as you get the ‘transition complete’ message. Some logs and vids of what your getting now will help.
What is the behavior your trying to achieve?
A verry clever change, but late. ![]()
I just merged the master into my branch and gave it a try but I dont think I notice any difference. I even tried something like this
pos_control->set_target_to_stopping_point_z(); pos_control->set_alt_target(pos_control->get_alt_target() + 10000);.
I can see on console the target is much higher but it doesn’t seem to affect how the plane flies.
When the message “Transition VTOL done” comes in console, the plane will slow the motors until plane stops ascending even if I have full manual throttle. I would really like to keep the plane on accelerating.
The background for this is that I’m doing my final thesis with the subject being “Ardupilot development and testing”. I have 13 years of experience with RC planes but this is the first time I’m using Ardupilot. As a part of the thesis I’m trying to help out small company which is developing kinda heavy tailsitter. The plane has big issue when transitioning from FW to VTOL as the plane will stop the motors and start descending when it gets the nose up causing it to end up in flatspin which ends up destroying the plane. This happens because the motors start up too slow and the plane has already gotten too much speed backwards to recover. This is why I’m trying to find how I can keep the plane accelerating up even after transition so I can try out some new approaches to the issue.
I’m testing the code in RealFlight 8 with SkyCat tailsitter.
As this is a part of my thesis, I dont hope on you solving the whole problem for me, but I will gladly commit my changes to main branch after I’m done with them.
Do you have any logs for this issue? I think the first step is to make sure the transmission is working as it should before making changes. How heavy its ‘kinda’? We have had some big tailsitters flying OK on the current code.
I personally dont have the logs but they do exist. The problem is not in the transmission because the most fatal crashes happen when autopilot transitions to QRTL as the waypoint is already set to much lower than the planes altitude. Plane weighs 12,5kg and it can carry payloads of 4kg. But I would personally need the information about the code more as I will try to explain how the code works in my thesis. I just cant figure out why the plane will decrease throttle after transition and waits for it to stop ascending until it is manually adjustable again. When the plane is on the ground, it will also take some time for the throttle to respond, it is not immediate. I’m guessing these two are somehow related?. I think I can get logs from simulator flight today if that helps.
I’m not sure where you seeing this but this is not how the code should behave. If you transition into Qstab you will have direct control of the throttle as soon as the transition complete message is sent.
If your transitioning on the the ground to a Q mode you will hit the transition time out, this is 2 seconds. So 2 seconds after you switch modes you will have throttle control.
I would guess that you can improve this by setting the Q climb and decent speeds and acceleration correctly and increasing the THR_MIX params. Should be able to tell more from some logs.
I just tried out QSTABILIZE and you’re absolutely right. I’m sorry for the confusion. The plane does respond to throttle right away with that mode, I just didn’t realize to try it. I only tried QLOITER and QHOVER. I think this will help me out a great deal. Thanks for the help
it’s never too late if the mood is good… ![]()
Hi Pete, If I get my new props this weekend I can try it, looks like not much wind and good weather here.
I have a kakute f7 aio board.
Can try it on this tailsitter

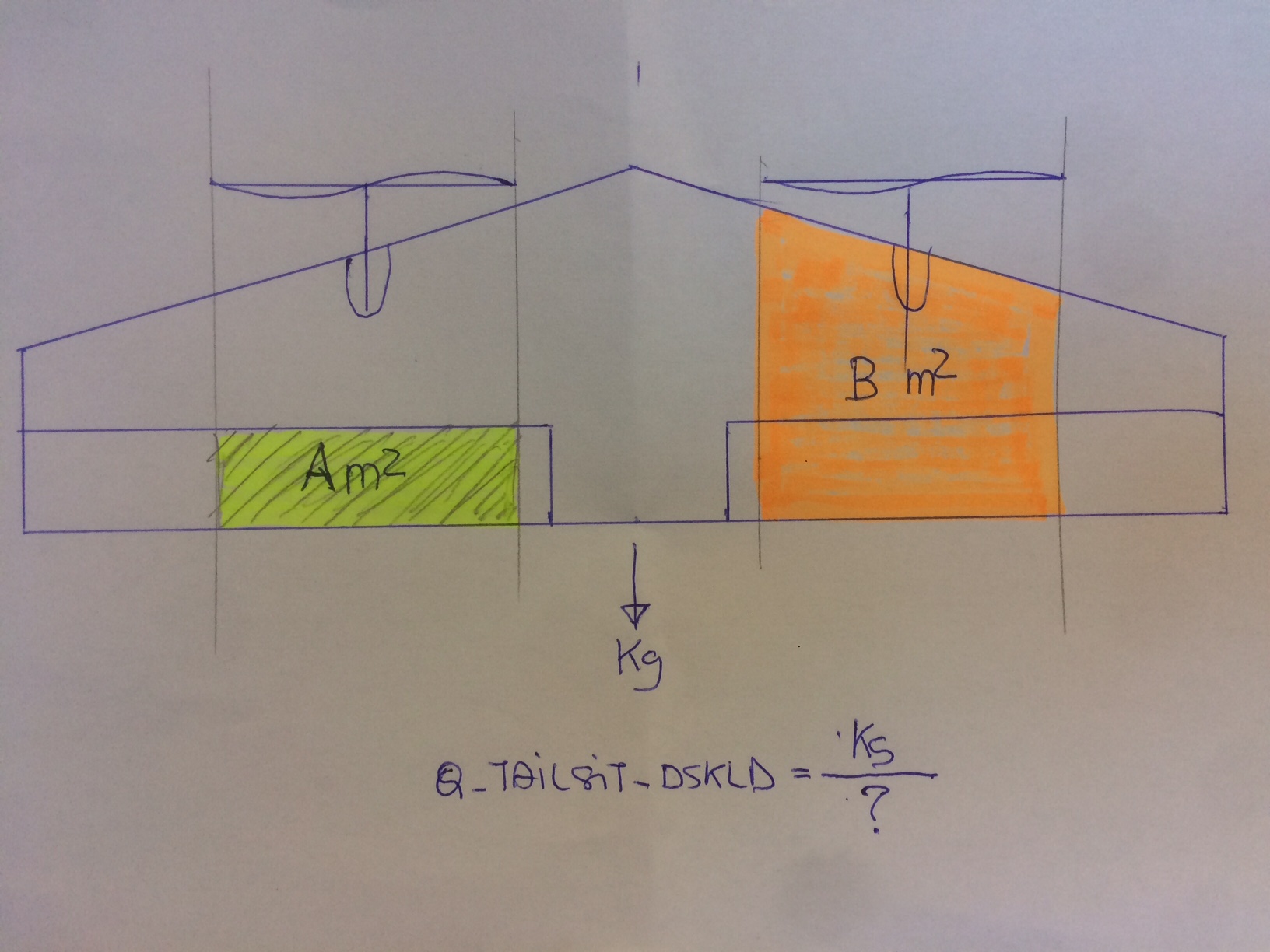
the total disk area of all propellers in m^2 = Ax2 or Bx2?
I understand that you mean A but the wording confuses me
1 Like
Disk loading is (All up weight) divided by (number of rotors×pi×r²)
ahhhh OK, it depends on propeller diameter, now I understand the reasoning
Thanks
Exactly. To make the same thrust a big propeller pushes a lot of air slowly where as a small propeller would have to push it very fast. Think jet vs helicopter. The speed of the airflow over the control surface from the propeller determines when the over all airspeed of the vehicle becomes dominant over then wash from the propeller.
Thank you,
one build for KakuteF7
1 Like
Be careful if you use Q_TRIM on non-vectored.