he was in VTOL mode, not a plane mode…any plane mode and he would be horizontal (although in manual mode with light enough wing loading he could hover in high alpha…but I doubt its light enough loading)…he was pitched forward into a very slight breeze…
the big problem with tailsitters , especially non vectored ones,(except TVBS) is keeping them upright on the ground long enough to arm and takeoff if there is any wind
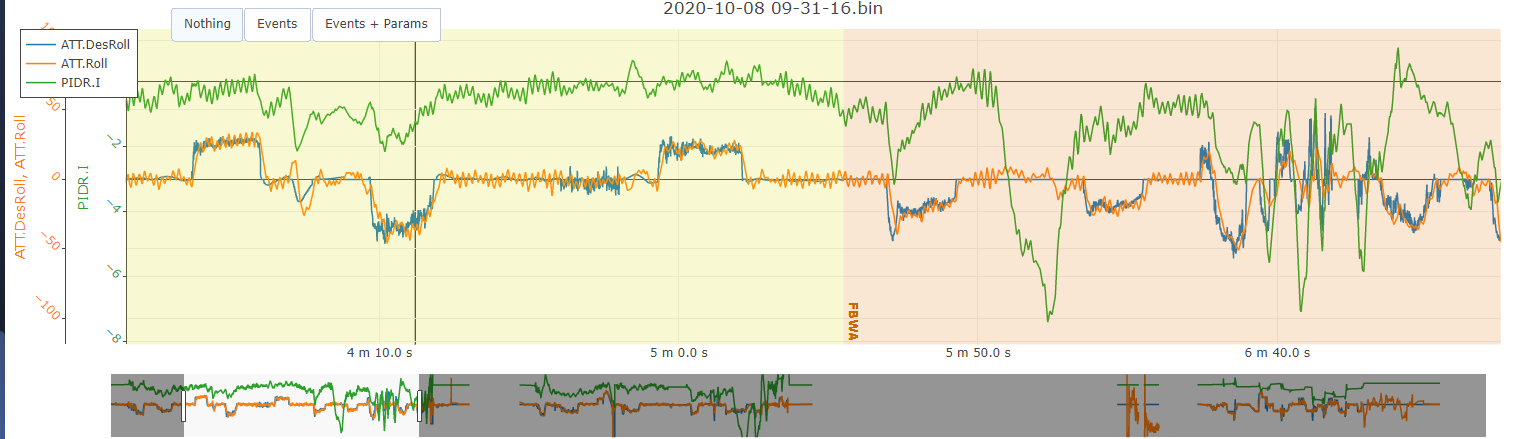
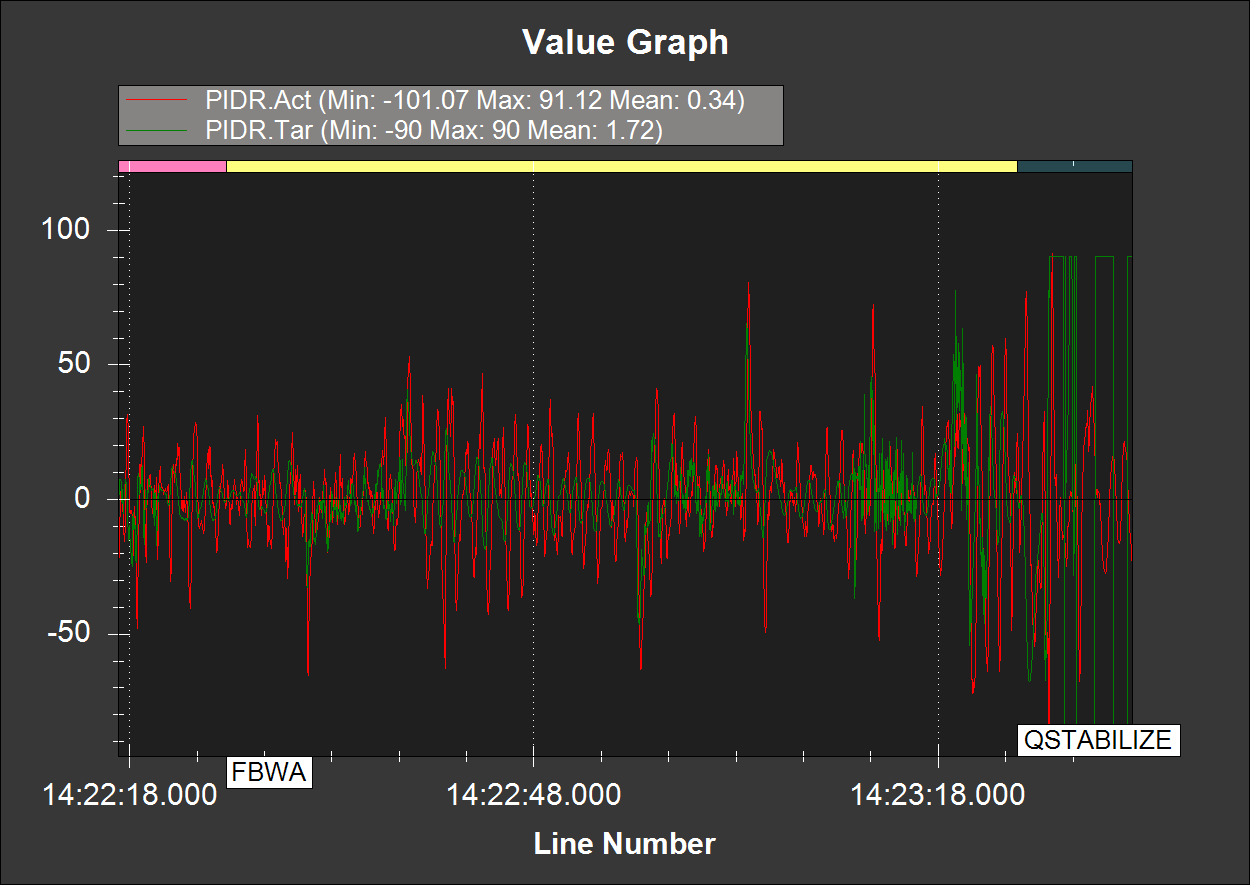
@losawing @lorbass @Leonardthall well, my third TVBS is flying pretty well (S-800 SkyShadow TVBS) but exhibits the exact same ~1Hz roll oscillation in forward flight…its there also in pitch sometimes but since that axis is inherently stable its not very big…its not there in manual mode, only stabilized modes…Pete Hall (@iampete) and I have been trying to figure what is causing this in three different platforms with three different power systems, flight controllers, etc.
We have eliminated Vibration (vibs are low),IMU aliasing (its there in glides), rudder param coupling (it has none), fwdgain to tilts params, loop rate, servo auto trim and have run out of ideas…the bigger heavier C1 manifests it the least, the z-84 and S-800 small wings the most with 4-6 degree 1Hz oscillation…have manually tuned and autotuned with it present throughout either process…these same platforms have flown with AP as normal planes several months ago and were rock solid in roll…its not big, but very noticeable in FPV footage and extremely annoying…
anyone else seen this? anyone have any ideas on what it could be?
Thanks Pete, I will lower them by 25% and see if it helps…those were the result of autotune…I am also trying another experiment today…I have my small BlackWing that I loaded my current firmware on, and now setup as a tailsitter (but not changing anything other than sched loop rate and enabling Quadplane tailsitter…using only FW modes) to see if the roll log changes any…it does not have any 1Hz oscillation…
I am also going to try a from scratch TX tune starting with zero I/D and see how the logged roll progresses next week when the wind allows…
It would be interesting to see how it behaves when flying around in ACRO mode.
That will be using pure rate control for roll and pitch.
I think QACRO will also be using the same rate controller, just with nav_roll_cd set by the MC controller.
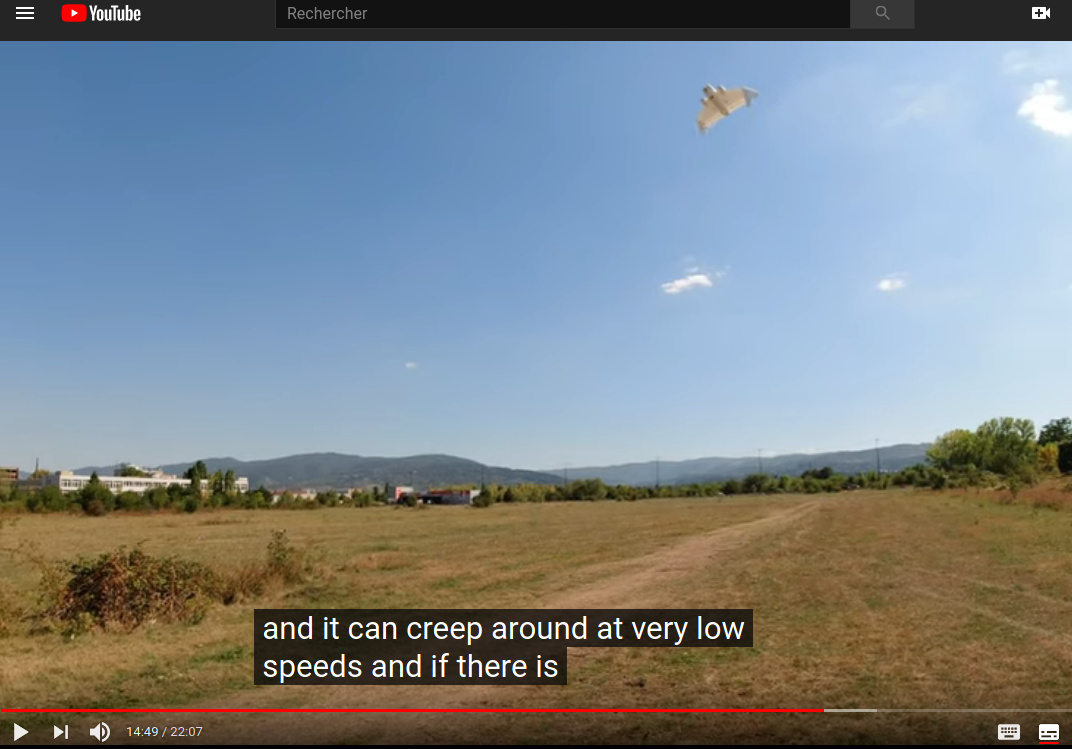
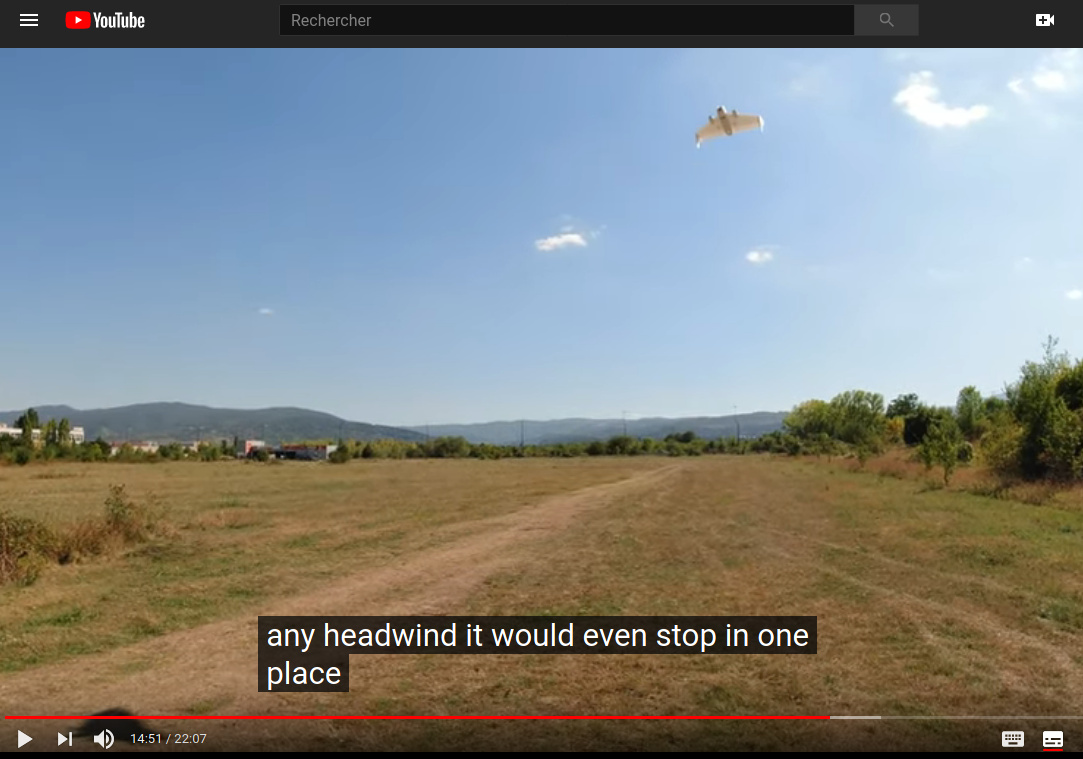

if the wing loading is light enough (4-8oz/sqft), in manual/acro you could do that for sure…or in Qassist FBWA, but while it would appear as a Plane mode, its really using motor driven stabilization…tailsitters are such a cross bred thing…
will try that also…thanks Mark
Autopilot control I would say perfect in those windy conditions.
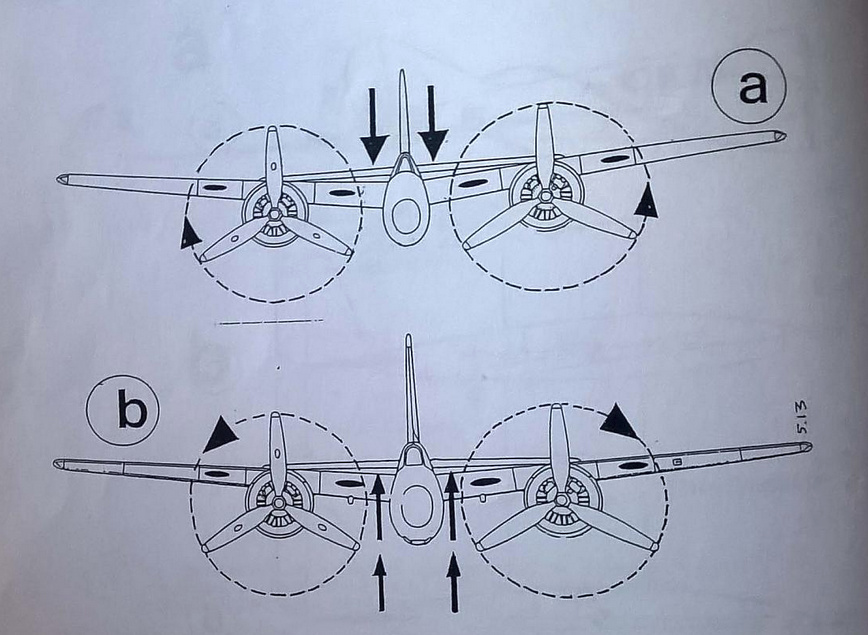
However I noticed that the direction of rotation of the propellers in the Wingtra (A) is the opposite of that suggested by Ardupilot (B).
1 Like
Ardupilot accepts both configs. It doesn’t take into consideration whether its A or B.
The recommended rotation direction is the same as for the E-Flite Convergence.
@hwurzburg Do you have an expert pilot’s opinion on the pros and cons?
For horizontal flight, option B is desirable. It counters the airflow from lower wing surface to upper, AKA wingtip vortices. Countering this flow reduces induced drag (or increases thrust, depending on your frame of reference).
Ari.
Most full size use B to help counter P factor torque in case of engine out…but if you are a flying wing, that’s pretty much mute since single engine operation = crash, or at least dead stick landing…I dont think it makes much difference in most cases…and I’m hardly an expert, just an old flyer, but thanks anyway…
Exactly, as the picture I posted shows, so I wonder why in the Wingtra they chose the other direction of rotation.
It looks like option A is considered better for full scale twins, if you go by Wikipedia and the Piper Seneca: https://en.wikipedia.org/wiki/Counter-rotating_propellers
But I think option B would increase the effectiveness of differential thrust for yaw control.
Extreme agressive tuning and nice patch, thanks @iampete!
See the description in the video for more informations.
I have an exaggerated servo shaking in my Dual Motor TS:
Matek F765
Servo Savöx SV-1260MG
BEC Vx output 7.2 v
Arduplane 4.0.7
I have tested with external BEC, shielded cable, etc … but the problem persists.
With the default values and only changing SERVO1_FUNCTION = 77 and SERVO2_FUNCTION = 78 ,then there is no shaking
It is typical of some digital servos that try to find the offset but this jitter is too fast.
Any suggestion?
Regards