Ahhhhhh… ok ok, I have not configured flight modes, I have the FC in hand pending finishing the frame. It was driving me crazy
Hi all,
My question at bottom of post 
Since no wind this summer to sail my boat I build another modification of popular Flitetest Wing Arrow to try here. Since I have a heli background I really admire the simple mechanical setup of this VTOL. Simply beautiful concept.
Concept one thing, making it fly another
But I am really encouraged by my first two limited experiences.
Here is my maiden flight.
(+) it has enough lift with my chosen LiPo 3s, ESC 20Amp, T-motors Pro KV1900, and 6*4.5 inch props. (eCalc helped)
(+) it was configured correctly to Qhover stabile with yaw and roll … but not pitch
(-) the vertical CG, I knew it was off a little bit but I thought I would get away with it, since it was so small 
So as you can see in the video, the model was doing great - then there is a point where I overcompensate the pitch to get it back but it has already passed some tipping point where it can’t recover from so it goes back over and land in the bushes.
Now then, I realise the vertical CG is not good enough so I added some weight.
Two coins like this one and now the CG is perfect.

Next day flight - very interesting.
I don’t have video but a log.
Here is my question if anyone likes to help out
I lift off in Qhover mode just like day before. Fine.
But after getting some 20 m up I ease off on the throttle but it justs climbs up.
After som time I pull throttle to bottom, but it still just climbs like nothing happened 
- Why did it not not respond to thx command?
When reaching 100m I decided to switch from Q-hover to FBWA before it reached the moon.
That succeeded fine!
Then lower altitude and planning to go for a normal fixed wing landing something happened.
it totally flipped over and then crached in the water
- Why did it flip that? (Failsafe?, Flightmode change? Mag or GPS lost?)
here is the short bin log. I have tried to figure things out but I am not experienced enough to understand what to look for.
https://drive.google.com/file/d/1qOTj-TnD3qWVNxoIZP5dy9tEHfbnQDoZ/view?usp=sharing
Much appreciated if anyone has a clue to Q 1 or 2 above.
Regardless, I will have more tries at it.
I have rebuild the whole plane now but just trying to avoid more stupid mistakes.
Best
K
The log is all in manual mode, I guess it does not go with that flight.
There could be may things that cause each issue. Don’t want to speculate, if you can find the log we can say for certain, if not we could probably suggest some things to check. That its flys at all means you have it set up 95% right.
Maybe some sort of tailsitter - sailboat hybrid… ![]()
Yes, sorry Pete, wrong file.
This should be the one https://drive.google.com/file/d/11crlkh8k98re9-Oe4vUuG-dPsKa0ySVE/view?usp=sharing
Thanks a lot.
1 Like
The climb in Qhover is due to the throttle trim being at throttle min. Any point above trim is climb, so it was always climbing. It should be ~1500 (RC3_TRIM). Probably best to just redo the RC calibration.
Cant see any clear cause for the FBWA issue, it was going a little slower that the rest of the flight, could just be a stall. Hopefully the GC fix will help here.
Please turn arming checks back on, if its not passing one, only turn that one off if you cant fix the issue. (ARMING_CHECK)
1 Like
Thanks Pete!
Aha, yes RC3_TRIM was indeed set to MIN (as I thought it should). Changed now.
I think you are right about the FBWA crash, it looks like a simple stall, from the log.
The vertical CG was fixed before that flight so that’s likely not impacting.
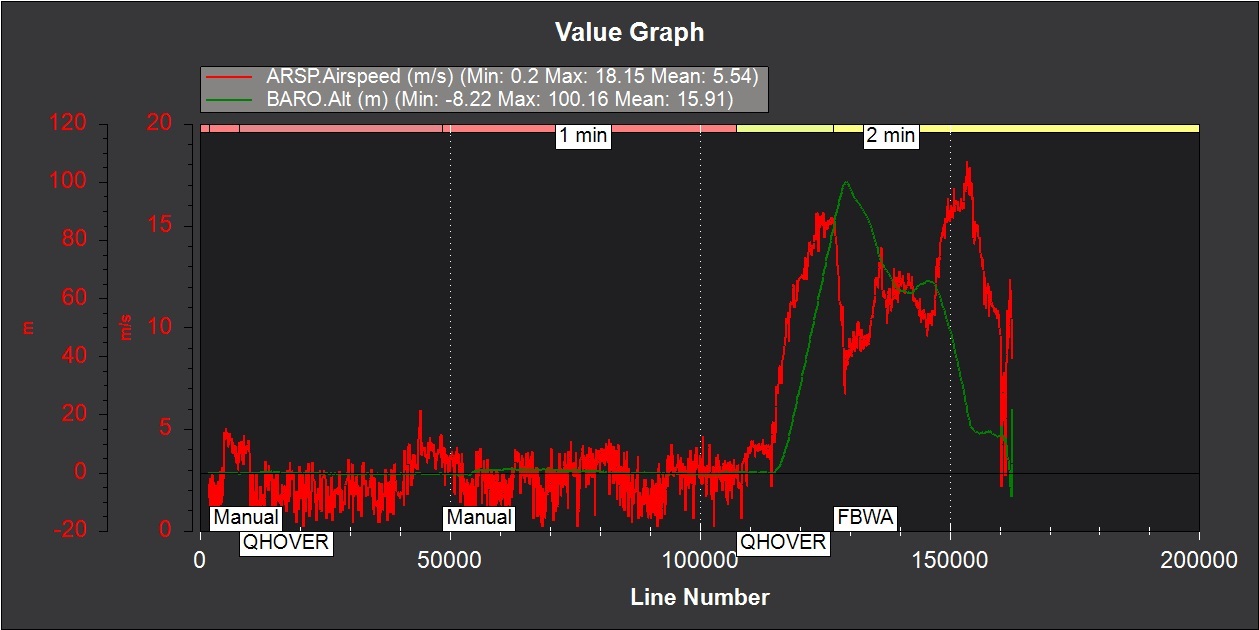
Green graph is the altitude up to 100 m then lower.
Red graph show the airspeed (I actually have a digital airspeed pitot unit onboard).
Looks like just before the altitude is at sea level
the airspeed is almost zero (stall speed estimated to very low 7m/s but this is way lower). If I read the log correctly.
Yes, I will turning Arming checks on again, forgot, thanks!
I think I’m good to have a second flight with this guy - whenever that might be.
Hi all,
Has any one had issues with EKF3 on master recently?
Trying to track down a yaw issue.
Thanks
Hello friends. Here are test flights of our FX-79
3 Likes
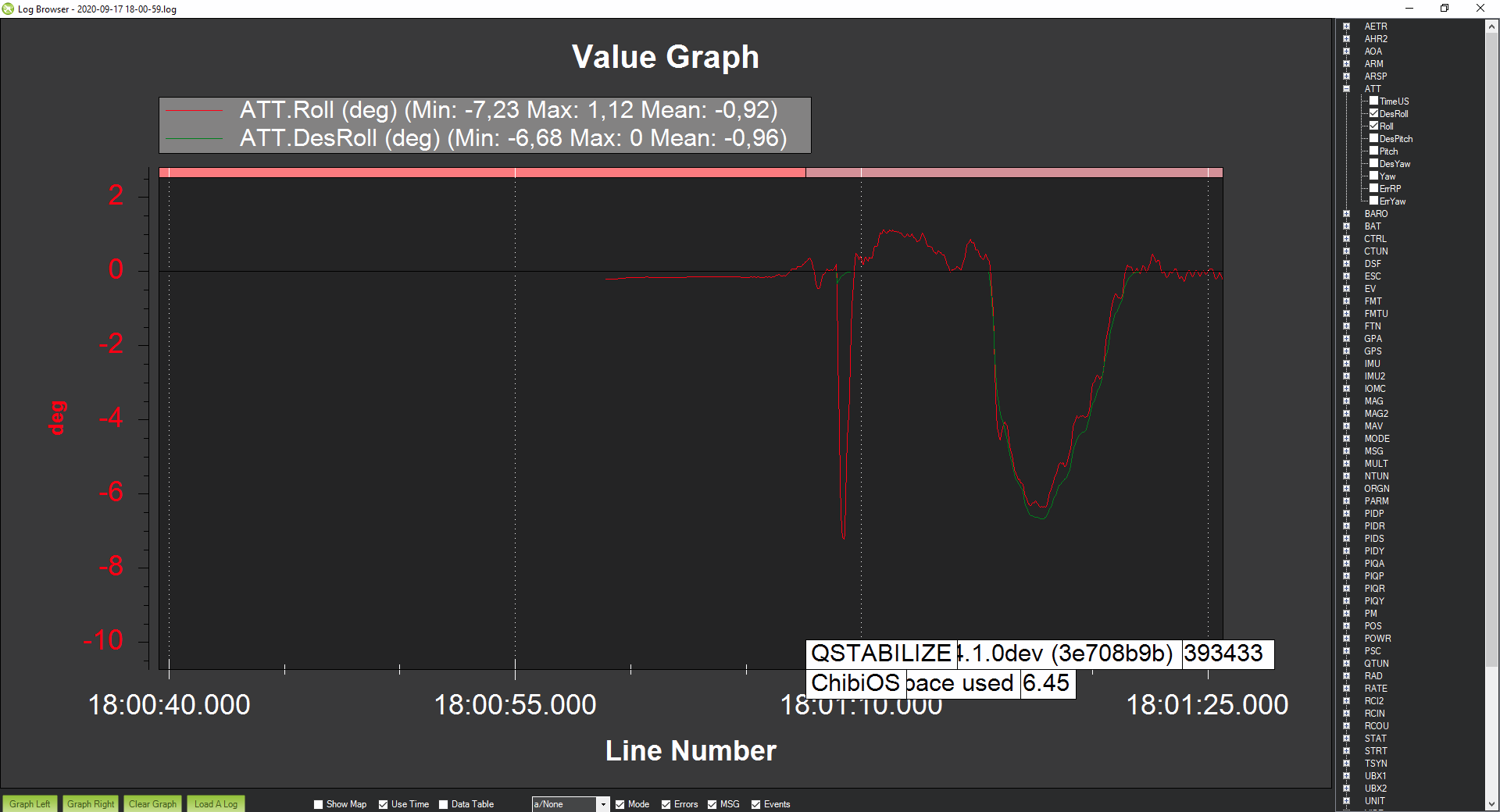
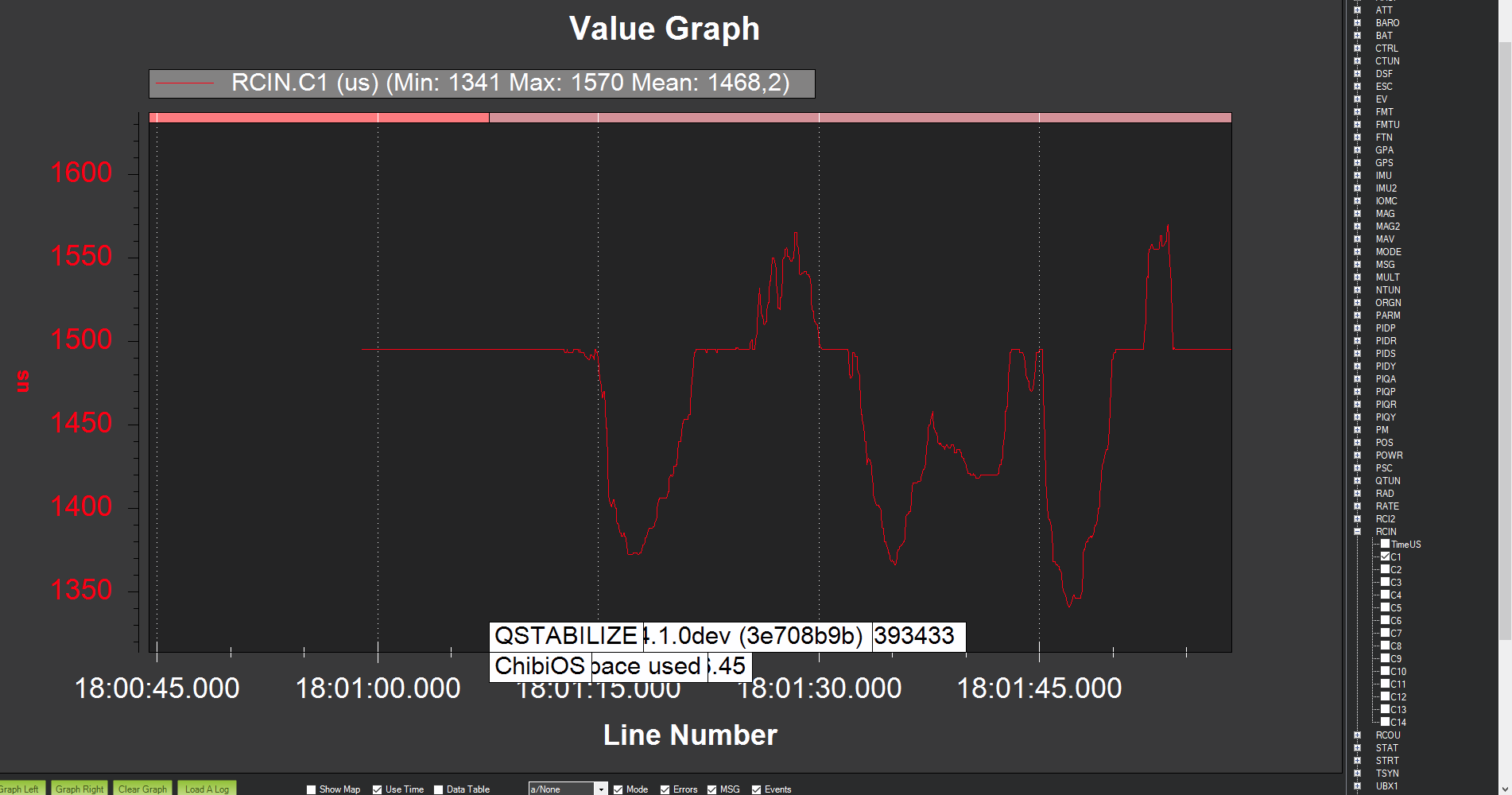
I did some tests with my 3d printed non-vectored VTOL Tailsitter, all in QStabilize, I noticed that constantly right after the takeoff it rolls to the left and then levels off right after.
From the log I don’t understand what it can depend on.
See the video at 00:27, I don’t make any roll corrections during this event, for this tests I use the master of yesterday. EKF3 enabled.
I still have to refine the tuning, this is the second takeoff with conservative parameters.
Does anyone else have this problem? Just to understand if it is the code that is doing something wrong.
I certainly had the internal compass which for some reason turned out to be rotated, so the EKF was certainly not happy, I’ll try again this afternoon.
1 Like
Interesting, happy have a look over the log if you share it with me via DM.
PIQR would be the first place to look.
I think for the non-vectored tailsitter this is the most interesting solution of the whole post, chapeau!
Getting as close as possible to the neutral point allows for impressive stability in hovergin, and great authority over control and corrections.
It’s a bit what they did with the Wingtra, but obviously this solution is a compromise that leads to make the airfoil work quite badly in translated flight.
Starting from the assumption that even a well-powered chair can fly, you can opt for this solution, as long as you give up on an optimized flight in plane, in terms of fuel consumption and speed.
Playing with this for a while yesterday I realized yet again that there are insurmountable limits on these configurations.
In perfect translated flight would dare to say almost boring, it proceeds at 9/10 m/s consuming no more than 2A, but in hovering it was an ordeal.
Even if we are crazy about the parameters there is no possibility to keep it in hovering, just a little wind and game over.
If there is no wind it stays there, but it just needs to tilt beyond a certain angle and it becomes unrecoverable.
Having no problems managing it in “full manual plane” I made it do anything, it was fun to take it to the limit.
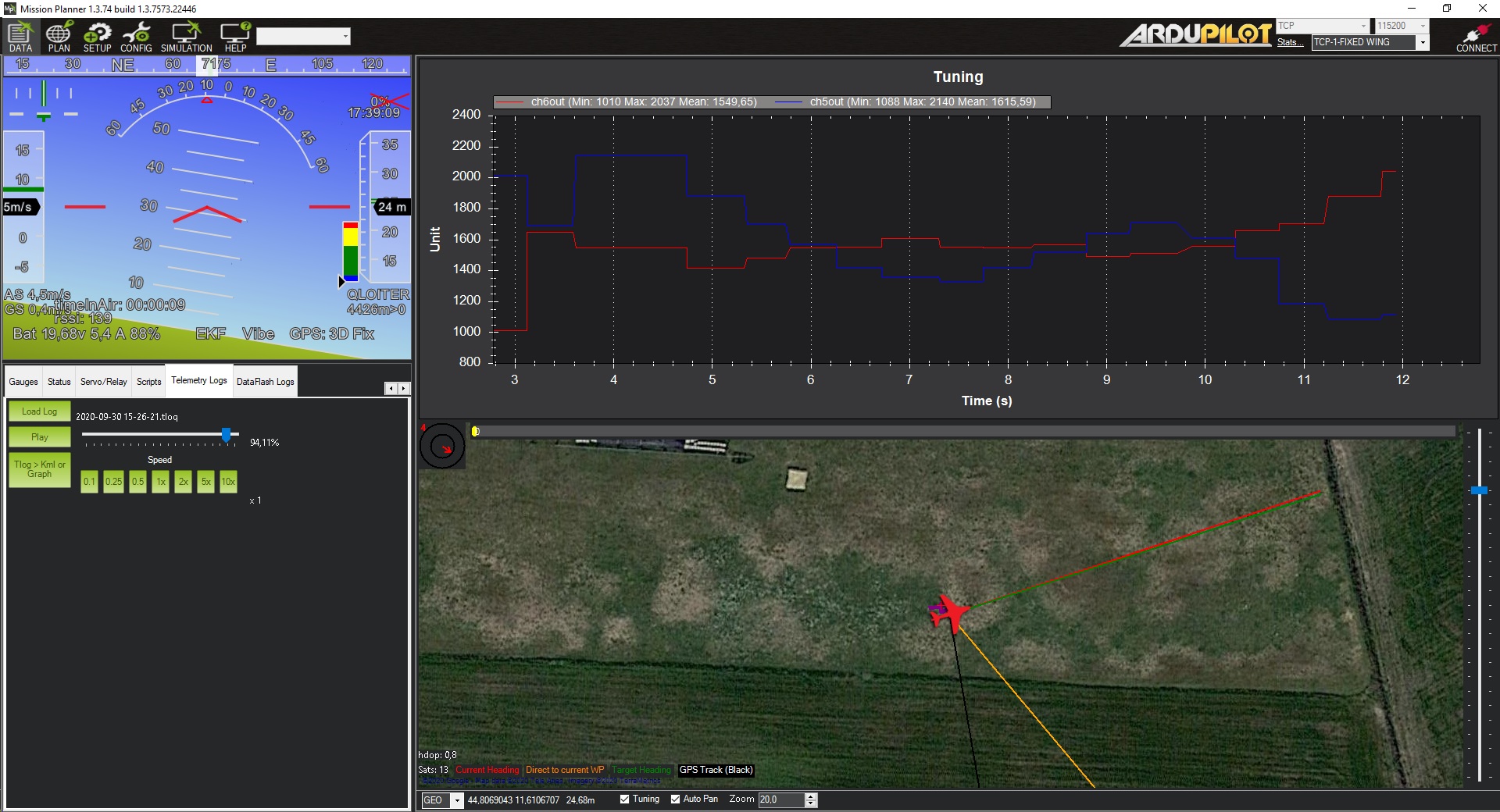
If you want to have fun watching this TLOG, especially at 94% during QLOITER, you can realize when the servos are working, often reaching the limit without being able to level it, as well as in QStabilize.
I played with the C.G. a lot without any good results.
Ardupilot helps a lot but how you design the tailsitter is fundamental.
https://drive.google.com/file/d/1wkjwvO41gr0PUfeamTt53_yDnJVyHQ3n/view?usp=sharing

Thanks  According to my experience the pitch stability of a dual motors tailsitter can be correct (non vectored) or very very good (vectored) but yaw authority is the main issue as soon as wind gusts are invoked. This is why I tend to put motors close to wing tips. Probably an heavy wing like the Wingtra would help too. I am curious about your remark concerning Wingtra why do you think it fly not efficient as a plane ?
According to my experience the pitch stability of a dual motors tailsitter can be correct (non vectored) or very very good (vectored) but yaw authority is the main issue as soon as wind gusts are invoked. This is why I tend to put motors close to wing tips. Probably an heavy wing like the Wingtra would help too. I am curious about your remark concerning Wingtra why do you think it fly not efficient as a plane ?
I agree the non vectored tailsitter is the most interesting because you have to design a wing able to fly in hover mode and plane mode. In hover mode only the wing section behind propellers is flying and you also have to take care of stability criteria which deal with relative position of NP and CG. It also means the NP can be at different locations between copter and plane modes. You can take advantage of this to set 2 different static margin depending on wing design and motor position.
I believe also that a stable Cm airfoil (like pw51) allows to set a static margin as low as 3% in plane mode. This helps a lot in getting an acceptable compromise.
I dont know why but qloiter is less stable than qstabilize.
I think the airfoil used in the Wingtra is the PW75, which at low speeds is not efficient, in fact its cruising speed is around 16 m/s, the wing has a positive angle of attack with respect to the fuselage of at least 4°.
With my 3d printed VTOL I was able to fly at 9 m/s without stalling, this is because at the moment I am experimenting with another type of profile kept neutral with respect to the axis of the fuselage, which gives excellent results and practically never stalls, but certainly has more problems in hovering since being quite thick in the angle of attack it overshadows the elevons a lot.
Even if you exaggerate with the angle and size of the elevons, unfortunately the profile affects so much on the dirtying of the air flow that invests them.
From my experience quite thin profile works much better in hovering.
https://drive.google.com/file/d/1JWDt78D3b40dpI3GnLy4_cXVYFkjmO6E/view?usp=sharing
This is the new revision I’m printing now, to which we have made some changes to increase the control and stability in hovering.
1 Like
Motors closer to the CG and more aileron surface 
I love green balls 
1 Like
About QLoiter: it would be quite useful to have a QPosHold instead of QLoiter, there would be far fewer problems during Plane-> Copter transitions, this is because even in the Copter the “Position Hold” flight mode is much smoother under braking.
Try making a transition from Cruise to QLoiter and then try again from Cruise to QHover, you’ll immediately notice the difference, and with QPosHold it would behave the same way.
The Loiter, being speed controlled, suffers from some known problems regarding the brake, while the Position Hold has not them being controlled in angle.
@tridge could add it, imho would be very useful.
2 Likes
When I see this video :
It’s amazing how it could be stay in the air in plane mode (fbwa I guess) at +/- a fix position. Looks like more wingtra during landing in wind. Wingtra seems to have 90° orientation to the wind in his code for landing.
1 Like