Here’s the first flight of this “thing”. The lack of individual thrust vectoring is making it really scary to fly but really fun! I set the axis as LeftTiltMotor and went for a flight just to see how it would behave.
I’m going to get into writing the script for this thing - just need to plan a bit and try to sqeeze in the time.
Edit: Ideally I’d have the motors work on aligning the body orthogonal to the earth and then do yaw control with the elevons. I tried to set it up but I found it difficult.
Hello i was wondering if someone can help. I am building a vtol tail-sitter. It is about 2kg and i have total lift capability of about 4.4. I can not get the airframe flying. Everytime i launch in any mode it just takesoff to about 50cm the pitches on to its belly and crashes. I have tried everything. When it is on the ground the control surfaces are raised as if for a fixedwing it would be pulling the nose up. i am not sure if i have everything set up right.
I can’t see Q_TAILSIT_GSCMSK & Q_TAILSIT_GSCMIN parameters. I have changed Q_FRAME_CLASS from 10 to 7, thinking that it is one parameter only for copter tailsitters and not for Dual-motor taisitter but I still don’t see it. Also not activating QACRO mode
Thanks Mark, I will use Matek F765 for my Dual Motor Tailsitter. I have the doubt if this gain scaling options is only recommended for ACRO mode, I will never fly in ACRO.
Q_TAILSIT_GSCMSK applies to all tailsitter VTOL modes, but if you keep Q_ANGLE_MAX at the default of 3000 (30 degrees) or less, then you probably won’t need to use the gain scaling options.
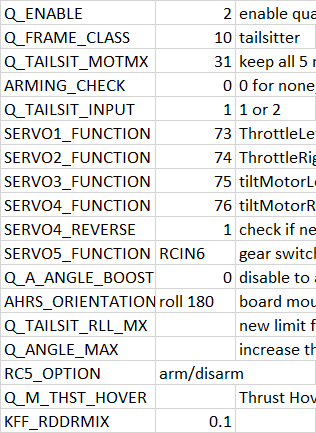
Hi, I’m quite new to ArduPlane, but I’m building a thurst vectored tailsitter (only 2 motor propeller and 2 servo controlling the tilt of the motor) for a PhD project.
I’ve got an Omnibus F4 with IMU and baro.
I’ve been configuring the params for this to work, but I might not have all the params correct yet.
This is all i ve for now :
is Q_TAILSIT_MOTMX 31 ok? i’m not sure if this makes it into another configuration?
I’ve done the acc calib in plane mode, put it nose up, arming in QSTABILIZE, but then when i look at the drone response when pitching it, the tilt are moving very very late, and the thrust is not responding to the rc throttle command. (radio mapping is ok). I tested in manual and i can see the motor tilting and thrust increase or decrease, but it doesn’t respond in QSTABILIZE or QHOVER. Any ideas?
I don’t have a GPS for the drone yet (and i’d rather not have it if possible), is it mandatory for the plane mode (FBWA for example) ? Can i disable it?
For a dual-motor tailsitter with frame class 10, Q_TAILSIT_MOTMX must be zero.
If MOTMX is non-zero, the frame class specifies a copter motor configuration e.g. 1 for quadcopter
I am still assembling my Dual Motor Tailsitter, but I have some questions:
1- I have decided to use two ESC DSHOT for my Dual Motor Tailsitter. I have read that ardupilot recommends DShot150 at 150kbaud, but would it be advisable to configure Q_M_PWM_TYPE > 4
SERVO_BLH_OTYPE > 4?
2- For a Dual Motor Tailsiter, if we decide to use the Q_TAILSIT_GSCMSK gain scale, what would be the best option?
BOOST >>> If I want a quiet flight, do I understand that this would be the best option?
ATT + THR
or Interpolation?
3-What is the relationship between Q_ANGLE_MAX and LIM_PITCH_MAX / MIN?
For a dual motor tailsitter, It is safer to begin with q_tailsit_gscmsk=0 and q_tailsit_thscmx in the range 3-5 because you do not want to reduce gains as long as you have not observed how your tailsitter is balanced and how it recover from q_angle_max. Q_angle_max=30 degree is safe value to start but when you want to increase horizontal speed you need to increase max_angle. As soon as the wing will produce some lift, throttle will be reduced and airspeed will pick up resulting in control surface oscillations.
Lim_pitch_max/min are pitch limits for fixed wing modes so no relation with q_angle_max
OK, thanks
I had read this and got confused: “lowering LIM_ROLL_CD and LIM_PITCH_CD. That will lower the required angle when you move the sticks in QHOVER. I will change it to use the minimum of Q_ANGLE_MAX and those values, but for now the LIM_ * parameters are the key.”