my quacopter is 1mx1m using mn6007 t motors antigravity and 60A tmotor flame esc with pixhawk orange cube with here 4 and siyi mk32 air unit and tx. i am getting this error " gps1 failing to configuring this gps" very frequently like almost every 20 seconds whenever the drone is on ground and when its ready to arm i immediately arm it and fly then i dont get any error in gps but once triggered rtl it goes into land mode dont know why? and also my drone is very unstable is flies like it might crash. cant handle wind properly like i can hear twitching sound in motors but after performing quicktune through lua script it has been improved but i have vibrations especially on y and x but y is crossing 80 and its red and also i tried to auto tune it @Michael_Oborne it gets an error message Autotune: failing to level, please tune manually. could anyone help me with ythis as im stuck i have put a damping mount on my drone and mounted fc on it, please check logs and let me know why i am not able to completely stabalize this drone. please help me, i will also attach images of my drone .




Here is the fastest way to solve your issues
My guess is that your vehicle does not follow these rules especially the very first one. Those arms look very long and flexible.
i did followed this until auto tune which is failing
Then post a .zip file containing all the files from the vehicle configuration directory created by ArduPilot methodic configurator. And make sure to use the latest version (0.9.3 as of this writing).
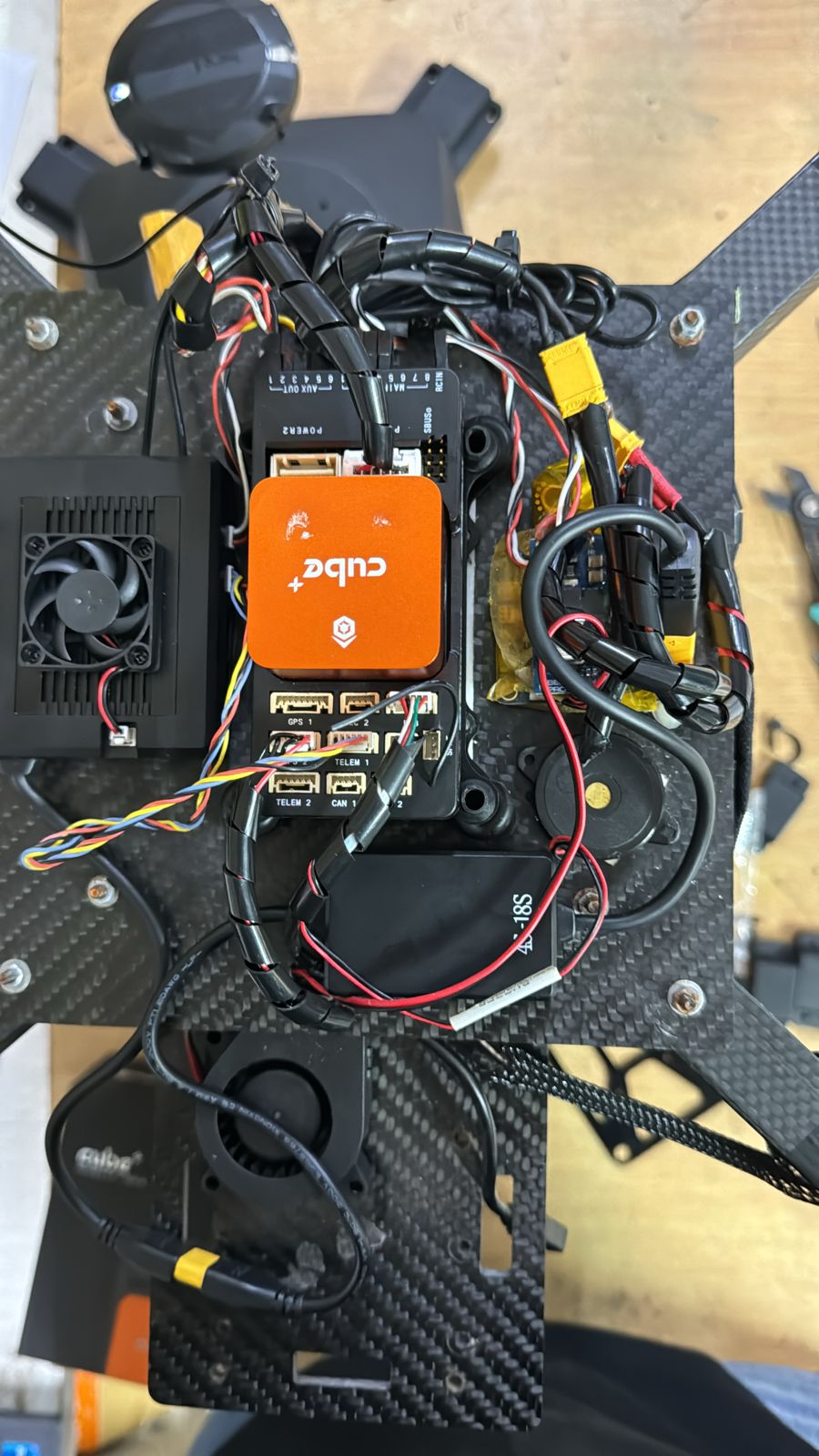
You usually do not need antivibration mounts with a Cube, they are better being hard-mounted unless you have absolutely no option.
Your wiring will be inducing vibrations, especially that spiral wrap, it’s not suitable for use near the flight controller. All wiring should be secured to the frame so it does not vibrate and move around, with just enough flexibility where it connects to the flight controller.
DO NOT fly again until you’ve taken positive steps to sort out the vibrations and tidy the wiring - the risk is you’ll have a fly-away or worse. Even considering the price of the props it’s not worth doing more flights until vibrations are greatly reduced and other configurations are improved (see below)
To fix the GPS start with these:
BRD_BOOT_DELAY,3000
GPS_GNSS_MODE,5
SERIAL3_PROTOCOL,-1
There is also a Here4 firmware update (do not update the UBLOX firmware!! ) , but this is probably not the cause of your GPS config errors.
You have a few parameters that are unsuitable for your copter - you’ll need to revisit the Initial Parameters calculator and start over there, selecting both “suggested” and “Flame” options.
The best way is to use the Methodic Configurator which will cover all of those and more.
In there will be a section running the VTOL QuickTune script - make sure you do that when you get to that stage.
Dont try and skip ahead through sections and go straight to Autotune again.
Enter these parameters using the add button on the 10_gnss.param file when asked to.
Amen to that !!!
That is the cause of most crashes
As I mentioned, there are still quite a few parameters that dont suit all your components - too much for me to go though them all here when you can do it yourself if you follow that process.
VTOL QuickTune will be your friend when you get to that stage - start the process from the beginning though.
Just the real obvious ones:
ATC_INPUT_TC,0.2
ATC_RAT_PIT_SMAX,50
ATC_RAT_RLL_SMAX,50
ATC_RAT_YAW_SMAX,50
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
INS_ACCEL_FILTER,10
MOT_THST_EXPO,0.4
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
PILOT_THR_BHV,7
And AUTOTUNE_AGGR should always be 0.1, or at lowest 0.07.
serial3_protocol, -1 means none ? as of now its selected to gps as 5
Yes, it is none because it is not connected via serial port, it is connected via CAN port. @xfacta knows what he is saying.
And I’ll repeat myself: do not skip any steps and ALWAYS change the “reason changed” fields!
And you still did not post the .zip file!
Exactly, and I’ve specified disabling Serial3 as a possible GPS port just to rule out more variables, since you have a CAN connected GPS unit.
Yeah sure I’ll post it tomorrow as my offc is closed today. In methodic configurator when i try to create a new vehicle file it doesnt saying no file template, although if i open the last option it opens the 3” quad configs
Are you using version 0.9.3 ?
Post a screenshot of the error, if any.
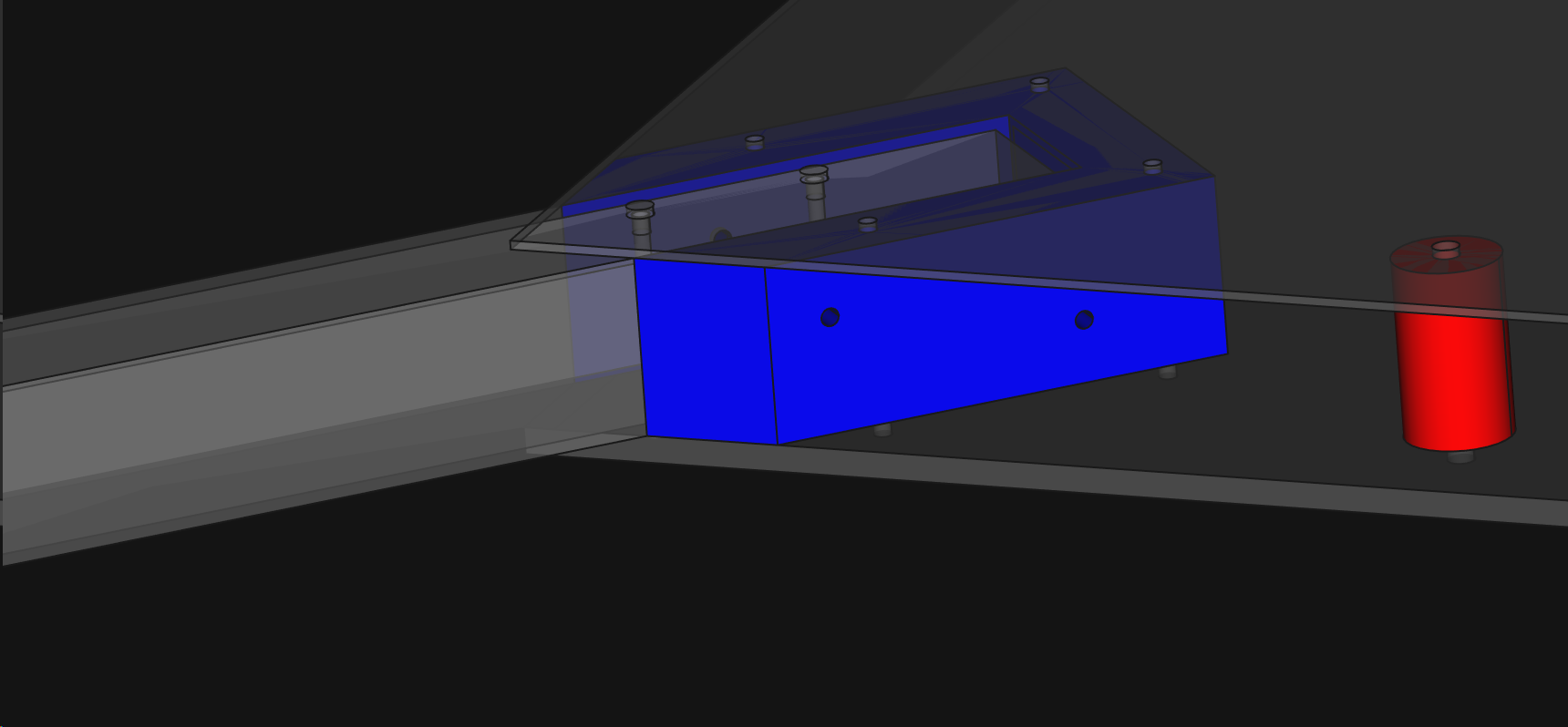
The arms are secured with two screws and hot glue, if I see it correctly? And the top plate is mounted to the bottom plate via the arms only? Not surprised you’re getting high vibrations.
I’d try reinforcing the arms properly and connecting the top and bottom plates separately. Something like this (X4):
https://drive.google.com/drive/folders/1dawskNWqTWZfTAoJDYaaRh1khKL37dRp?usp=sharing
here is the parameters file please have a look
yes i have now placed rubber standoffs inbetween the frame and il get this type of holding 3d printed and see whats the result
No screenshot of the error?

Please check the video, vibrations are reduced but the here 4 gps problem still there in mid flight gps looses and it went to land mode suddenly