I m using pixhawk in hexacopter. connected to the RC. But when the throttle reaches to more 65 percent, then it move only little but doesn’t fly at all and its not stable. Falling to one side. Any possible solution to make it fly on less throttle.
Post a .bin flight log for help.
2 01-01-1980 04-00-00 AM.bin.log.param (17.5 KB) 2 01-01-1980 04-00-00 AM.bin.log (57.7 KB) 2 01-01-1980 04-00-00 AM.bin (57.4 KB) 1 01-01-1980 04-00-00 AM.bin.log.param (17.5 KB) 1 01-01-1980 04-00-00 AM.bin (570.7 KB)
These are all the .bin files. please review it
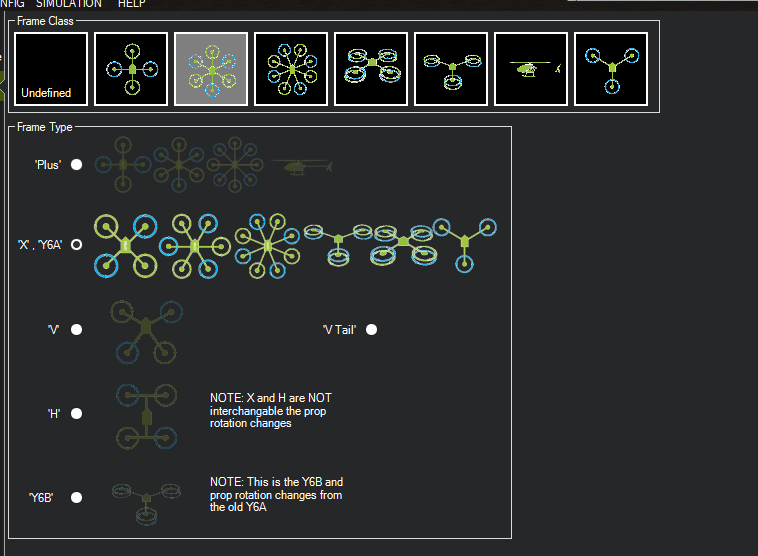
You have it configured for an Octocopter not a Hexacopter. Set FRAME_CLASS to 2. Restart the board and then check for proper Motor Order and Direction with Mission Planner’s Motor Test function. Then before flying follow the Basic Tuning Instructions here:
https://ardupilot.org/copter/docs/tuning-process-instructions.html
Sorry, you are right. I was looking at someone else’s log. But, have you checked the motor order and direction?
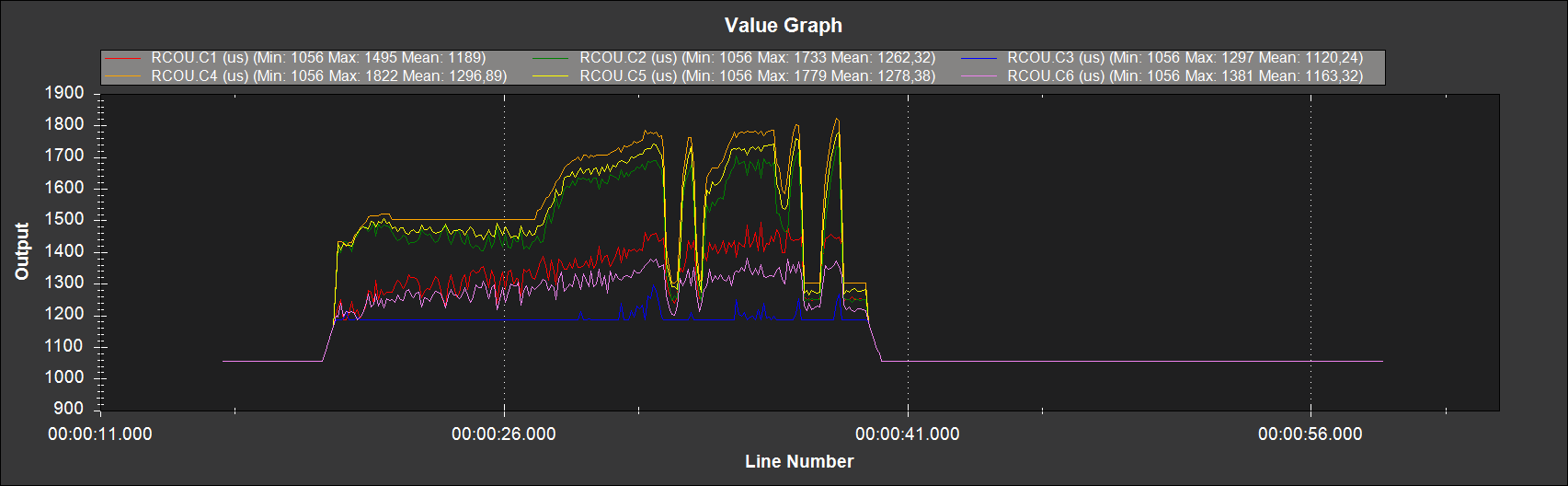
Hello! I don’t know why but your motors 1, 3 and 6 are doing practically nothing. Maybe the ESC are not calibrated?