Hi Experts, I created a drone for mission purposes using Pixhawk 2.4.8 and ArduCopter 3.6.7. I use SJ6 Legend Camera for triggering photos and video, and use FlySky for switching between Photo and Video, and it works, When switch to Photo, i autocamtically take photo every 5 seconds. When switch to Video it capture video footage.
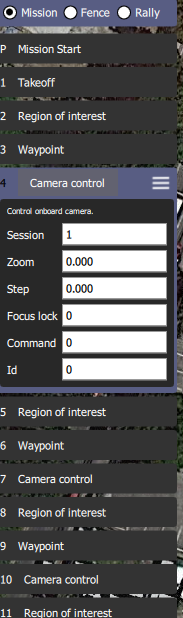
My concern is, i want to use DO_DIGICAM_CONTROL so that it will take photo everytime i called in in every waypoint. So, i started the mission, switch it to Video to record the place. This is my mission commands: In my undertstanding It should capture on every waypoint right? but it didnt.
Because it works in my radio transmitter, switching between photo and video. And if the switch is in the middle, it idles. Where should i supposedly put it?
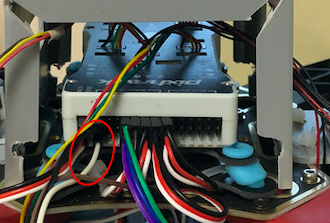
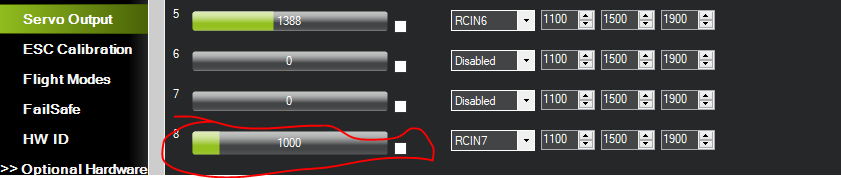
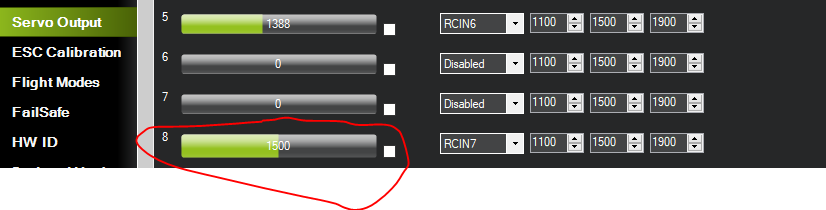
I connected it on the Main 8 because it works, when i switch between photo, idle and video, i just set it up here.
Thats the only thing i set up and assigned channel 7 to camera trigger.
The only problem im facing is that, then i created a mission and set DO_DIGICAM_CONTROL on each waypoint, it wont trigger photo. By the way i did activate video on this. Supposedly it should camture photo right? Bacaue i called the command.
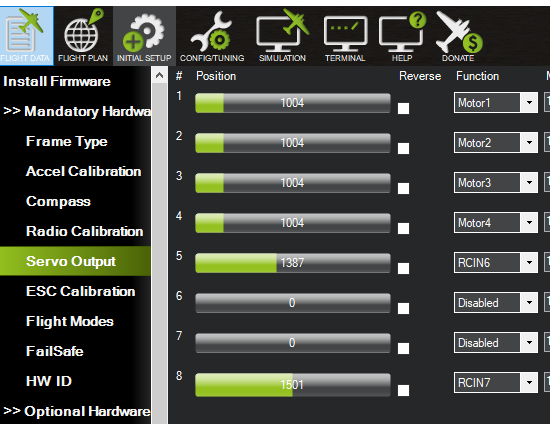
As @dkemxr indicated, you should be able to use option the camera_trigger option for Servo 8. Using the the unused servo outputs has worked well for me - they are very easy to access and change in Mission Planner, and easy to access on the FC hardware.
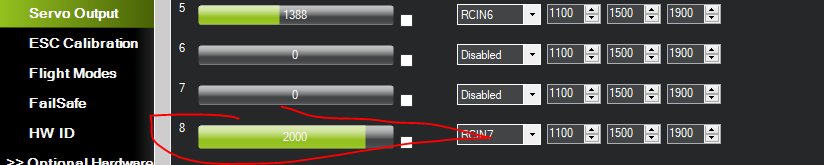
You will need to find the optimum PWM trigger settings so that it consistently takes pictures when triggered. You can do this in MP from the Camera Gimbal tab in Mission Planner. You can also assign a camera trigger to an RCx input so that you can manually trigger the camera as well.
Hi, thanks for your response. I alreadone disabling servo 8 from the servo output field, and Enable Servo 8 on the camera gimbal fied. But i dont have an option to switch between video and photo instead it consistently take photo.
DO_DIGICAM_CONTROL will trigger a “high” PWM value which I suppose will only take a photo with your setup. Try using DO_SET_SERVO commands instead and configure the PWM output on the command line you need for either video or photo. Not sure this will work but try it out.
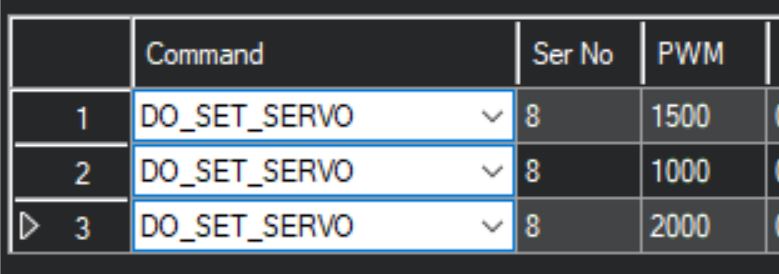
OK then try using the DO_SET_SERVO commands in the mission as shown here. Line 1 will do nothing, line 2 will trigger photo and line 3 will trigger video. These command simply output the PWM value configured until another command is given. It might reset at the next Waypoint, not sure.