There is no doubt that DJI Video TX system is one of the best systems out there for high quality video transmission and when it comes to FC, Pixhawk is my champion.
I saw a video on YouTube where one guy tried to get DJI Occusync to work with Pixhawk using MAVLINK and using Telemetry port 1. https://www.youtube.com/watch?v=6tCBVynN8EI
I tried to give it a shot but so far I am not seeing any OSD data.
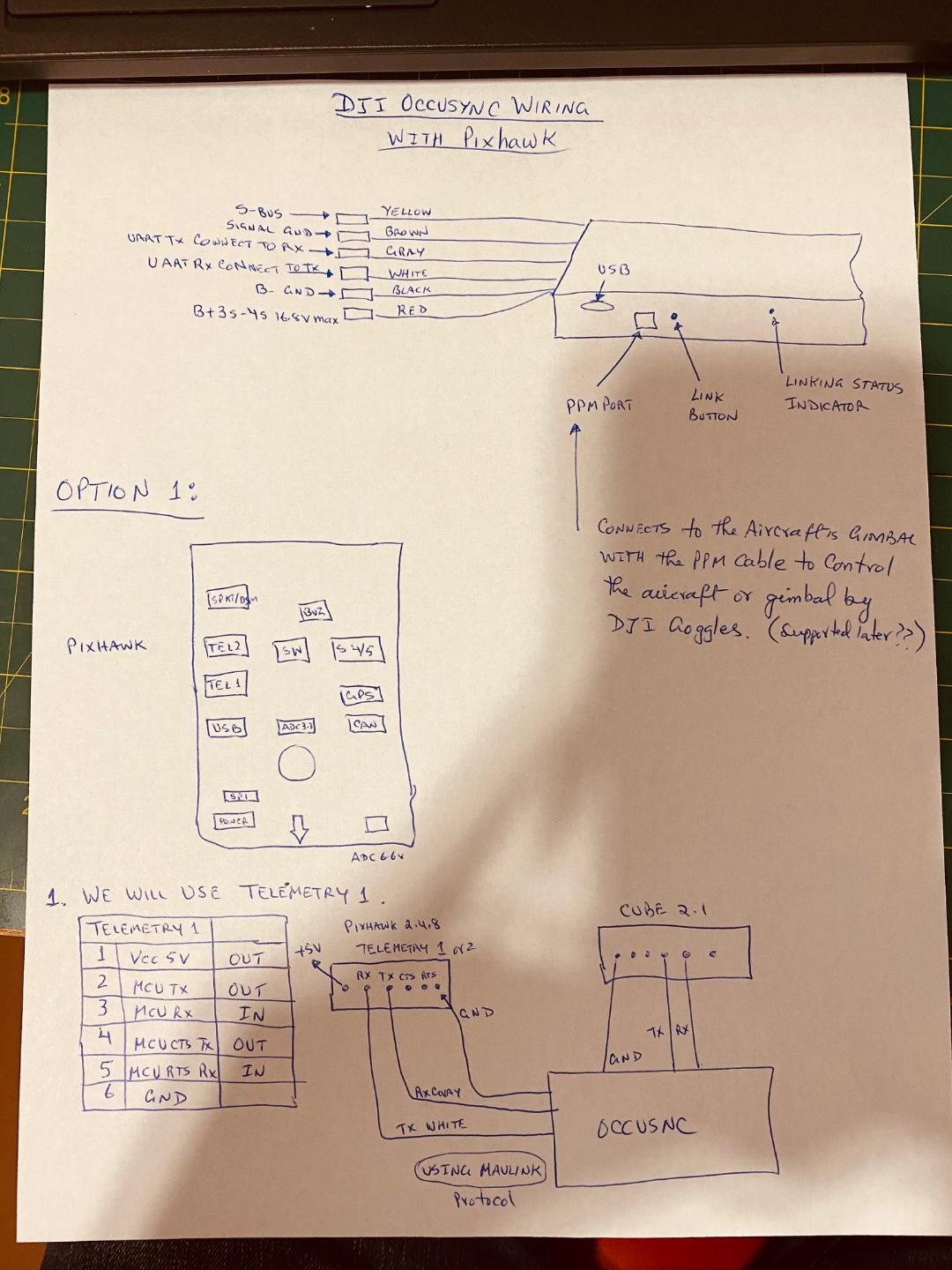
Below is my wring diagram for PixHawk 2.4.8.
Do I have to do anything inside mission planner to get the data out?
Yes, I have SERIAL1_PROTOCOL set to 1. Are there any other parameters that requires adjustments?
SOLVED: Many thanks to Ian of MadRC
This is what you need to do and follow these steps as explained below and you will get it worked the first time.
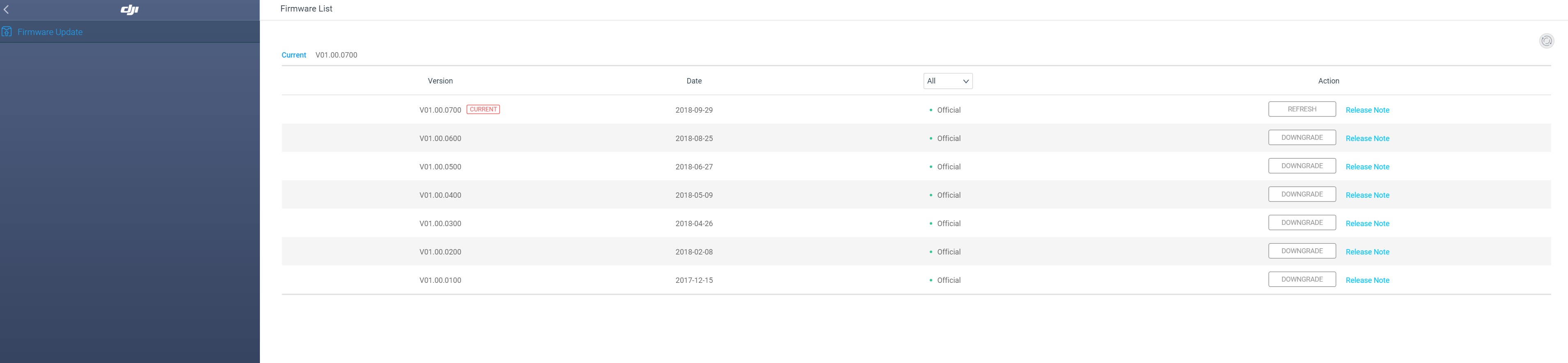
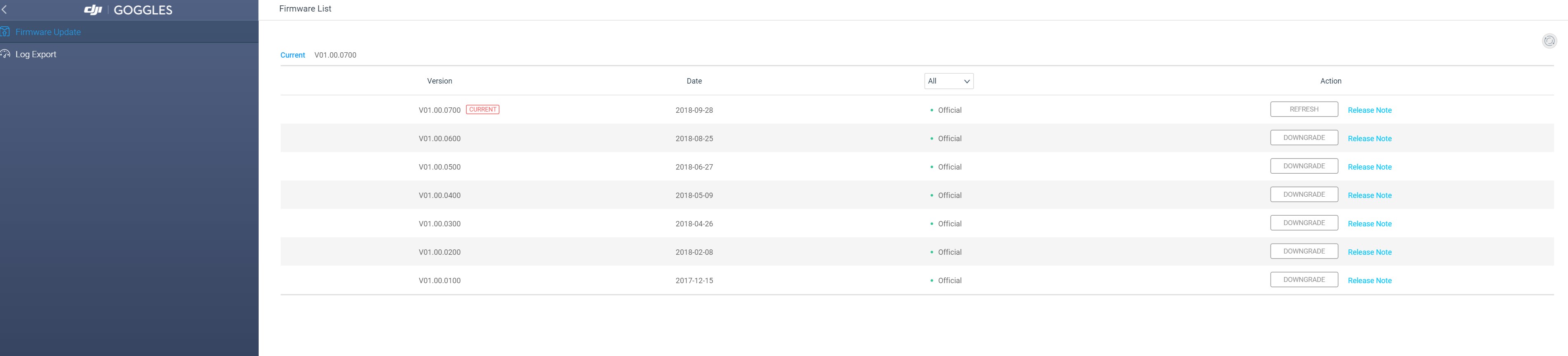
A. Download DJI assistant 2 (make sure you download DJI Goggle RE assistant as there are many other versions) to your laptop and make sure you upgrade your DJI Goggle and Occusync to the latest release. If you don’t know how to do that, watch this video https://www.youtube.com/watch?v=s4-KAhgd7Ws
Make sure DJI Occusync and the Goggle are linked. I am asuming you know how to do the linking procedure if not google it.
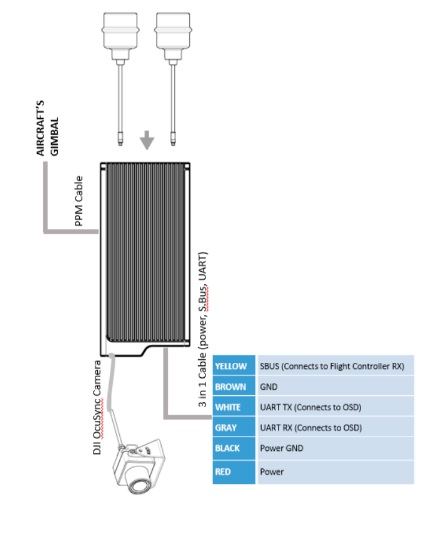
B. Learn to understand the wiring of DJI Occusync.
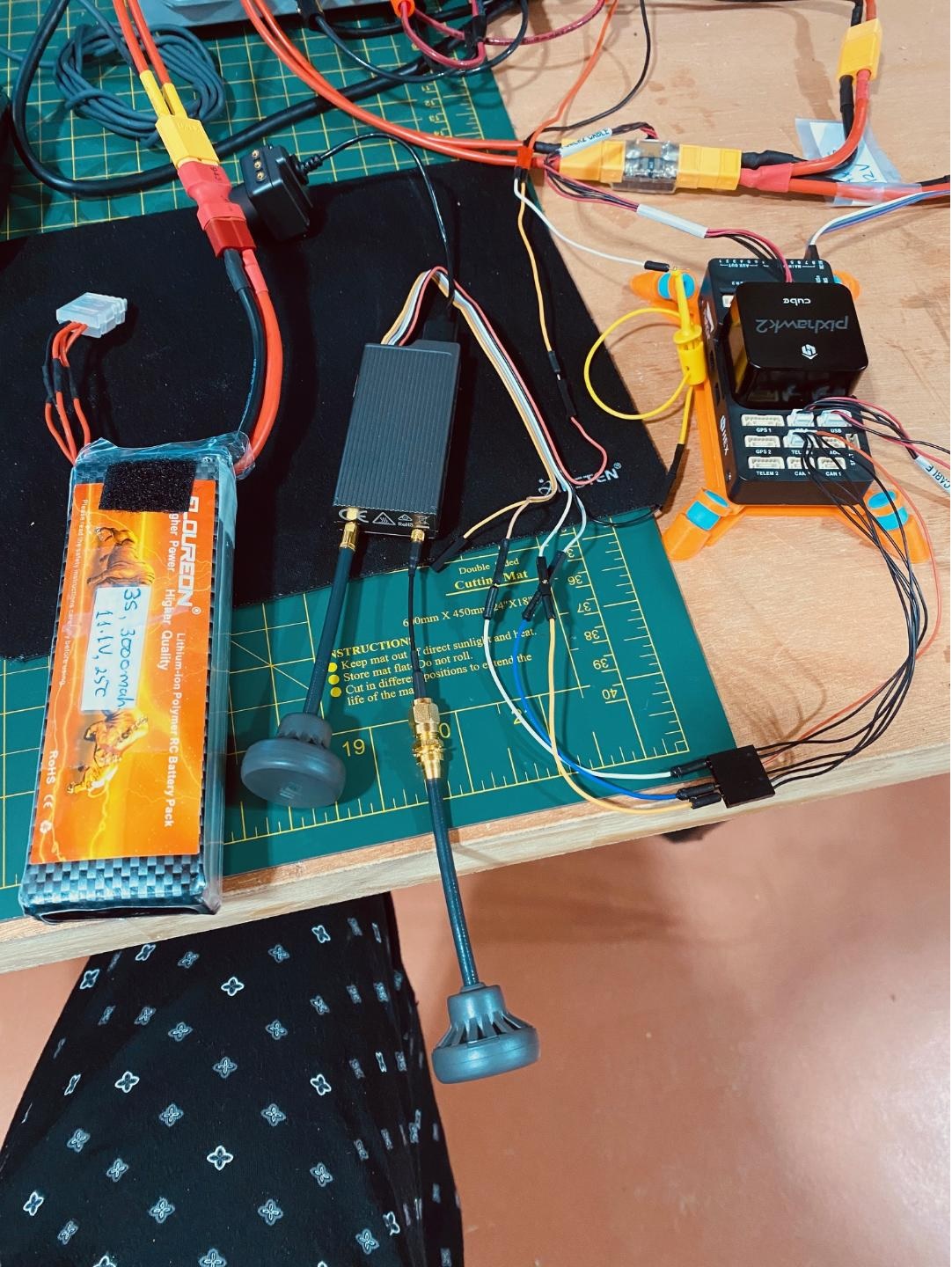
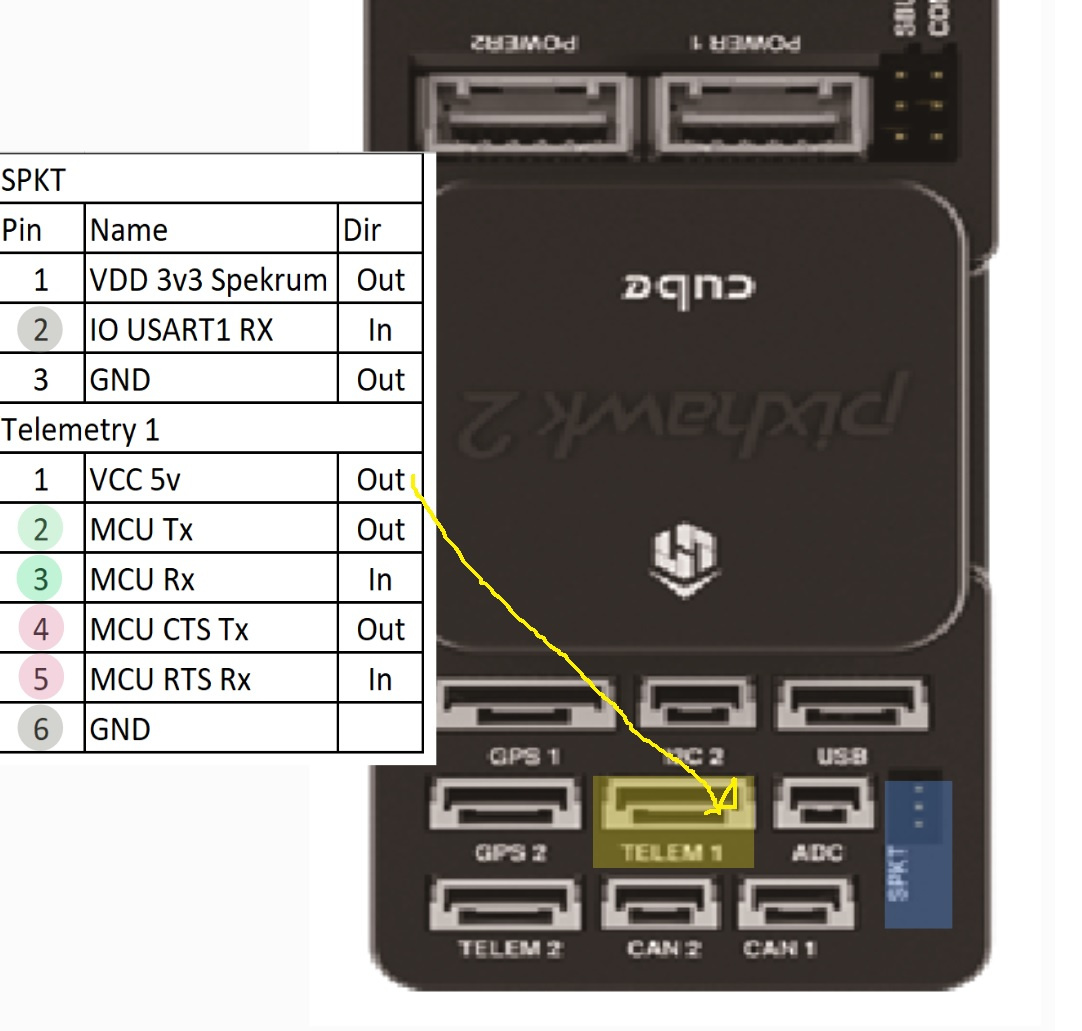
C. The wiring connection between either Pixhawk 2.4.8 or Cube etc. is shown above in the diagram.
Here is the verbal explanation of the wiring.
- One Lipo battery Powering the Pixhawk and Occucync.
- I am using Telemetry port 1 on the Pixhawk. telmetry 2 should work fine as well. make sure Telm 1 is set for Mavlink.
- Pixhawk Pin 2 (Tx) connects to Gray Wire on Occusync.
- Pixhawk Pin 3 (rx) connects to White wire on Occusync.
- Pixhawk Pin 6 (Gnd) connects to Brown Wire on Occusync.
Do not connect the yellow wire to anything as its the S-Bus wire.
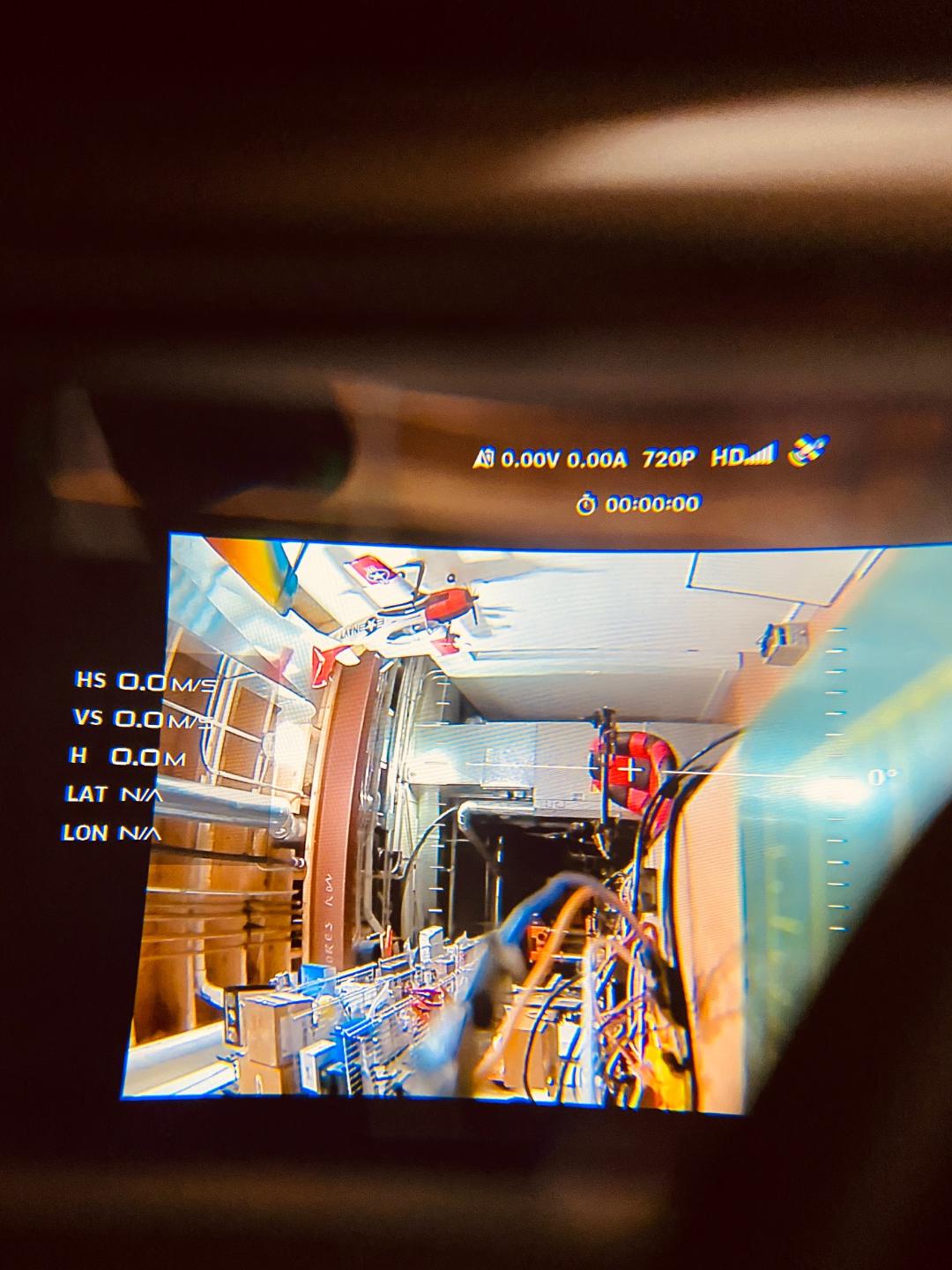
Power up Pixhawk and Occusync. Power your Goggle and you should see something like this.
At this point Occusync only provides limited telemetry data picked up from the Pixhawk.