Back in August, using AC 3.6.0 RC7 on HolyBro’s Pixhawk 4 I had a weird crash on the country side in northern Germany. After some successfull flights, during another flight I suddenly lost control over the copter. It started doing weird things and finally drifted into a tree. Looking into the log, I saw weird signal changes on all channels, also the flight mode was rapidly changing:

https://farm2.staticflickr.com/1876/42445673810_e880d24515_b.jpg
First, I thought a nearby (1,5 km) radio station (sporadically sending wheather reports) was the originator. I was using a Taranis X9D+ with X8R reciever and 433 MHz telemetry link.
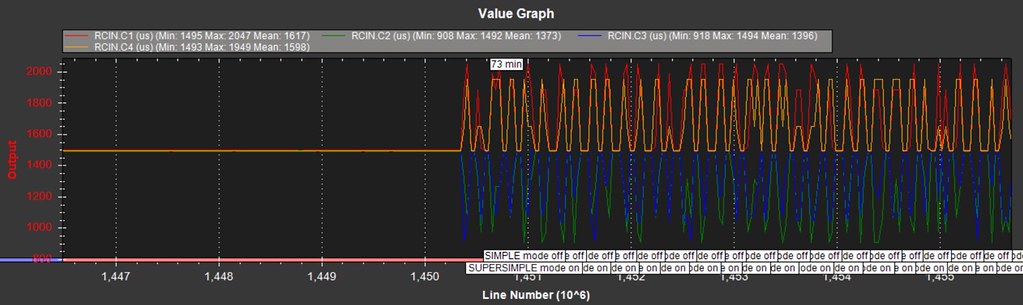
The strange behavior could be reproduced at that location also on later tests (only on ground without propellers). I had activated the Taranis log in parallel and there everything looked normal. The Pixhawk log again showed rapidly changing RC input and rapidly switching of flight modes:
https://farm2.staticflickr.com/1878/44476204211_15aae5a980_b.jpg
Meanwhile another user of Pixhawk 4 and AC 3.6.1 (stable) had a crash in Switzerland with exactly the same pattern. He also lost control over the copter and after weird movements it crashed. He was also using Taranis X9D+ and X8R receiver. In his log you can also see these strange RC input patterns and the rapid mode switches:

https://farm5.staticflickr.com/4839/32158158628_02ca95828f_b.jpg
After some further research, we found another report with the same weird behaviour:
This user was using Pixhawk 4 with Taranis X9D+ and R9M + R9 receiver.
Meanwhile I do not believe anymore that this strange behaviour was induced by the receiver. In my examples you see that also flight mode “SIMPLE” was activated although I did not assign it to any RC input.
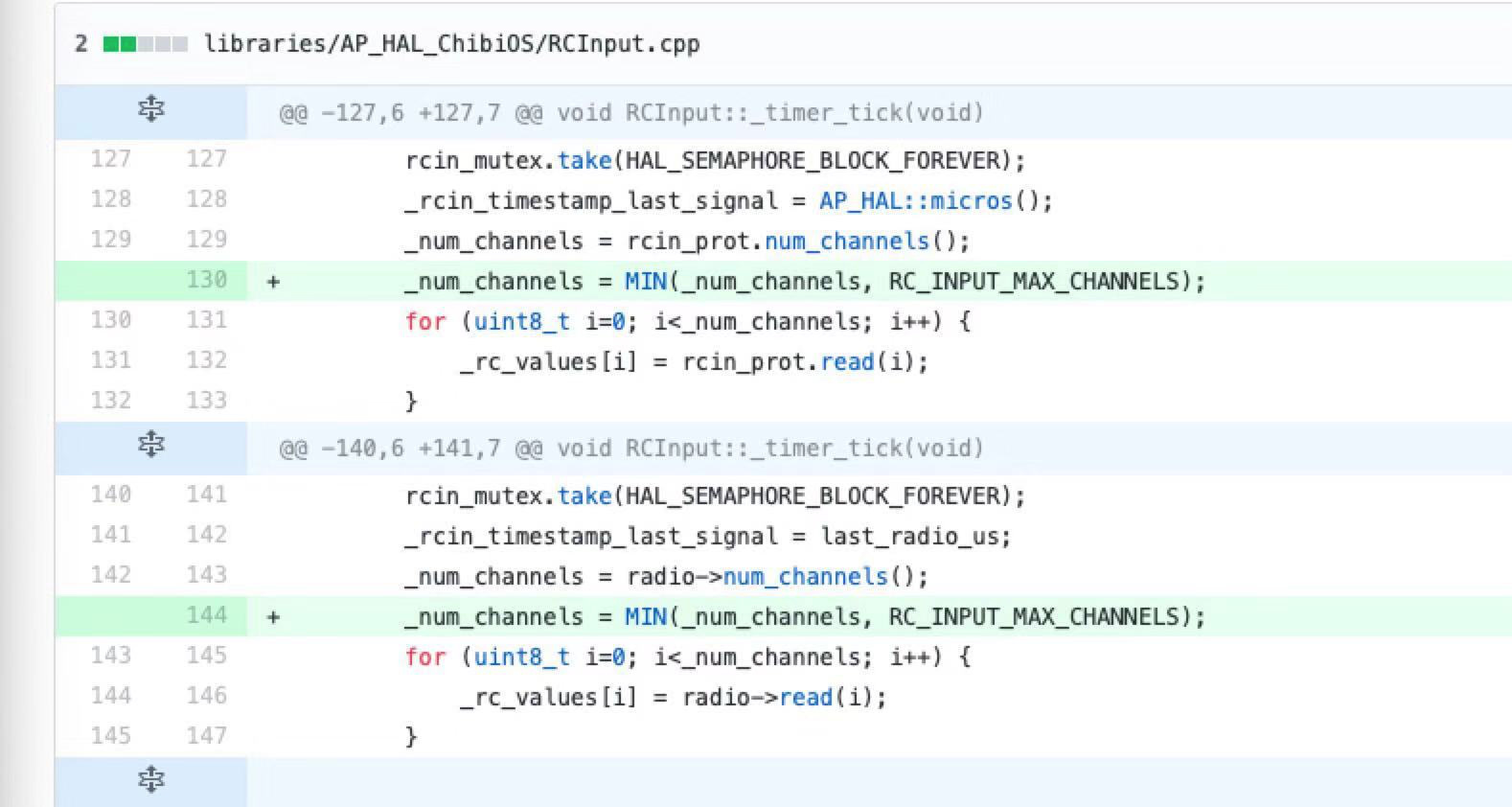
My guess is that there is either a bug in AC 3.6.0/3.6.1 (ChibiOS) or a hardware bug on the Pixhawk 4.