I need some help from you specialists. We have a new build with the general properties:
Cube black on “Kore Carrier Board”
Firmware 3.6.8
latest Mission Planner Update
X8
MN605-S (170KV) Motors
20inch propellers
12s
TOW: about 12Kg
After a first crash (a few days ago), today we would like to start AutoTune. At first, we was hovering ad flying a little bit in AltHold and everything was “okay”. Okay, enough for starting AutoTune.
Directly after starting AutoTune, we had strange movements left and right. I would say more than 45degrees. The copter was not able to come back to level and so the copter was loosing altitude during left/right movements. We directly stopped AutoTune, but no chance!
The first crash had the same behavoiur, but we thought it was from to fast moveent on RC stick without good PID values.
We started the AutoTune with PID values from a very similar X8 (17inch propellers) but the same weight and configuration.
Please help me to identify the problem and to avoid an additional crash.
Do you use a PDB ? How’s your power harness looking like ? And most important, which ESCs ?
Your copter seems a bit underpowered. Your median PWM output for level is 1570. Then you have either a desync problem or a power harness one. I’d go for desync.
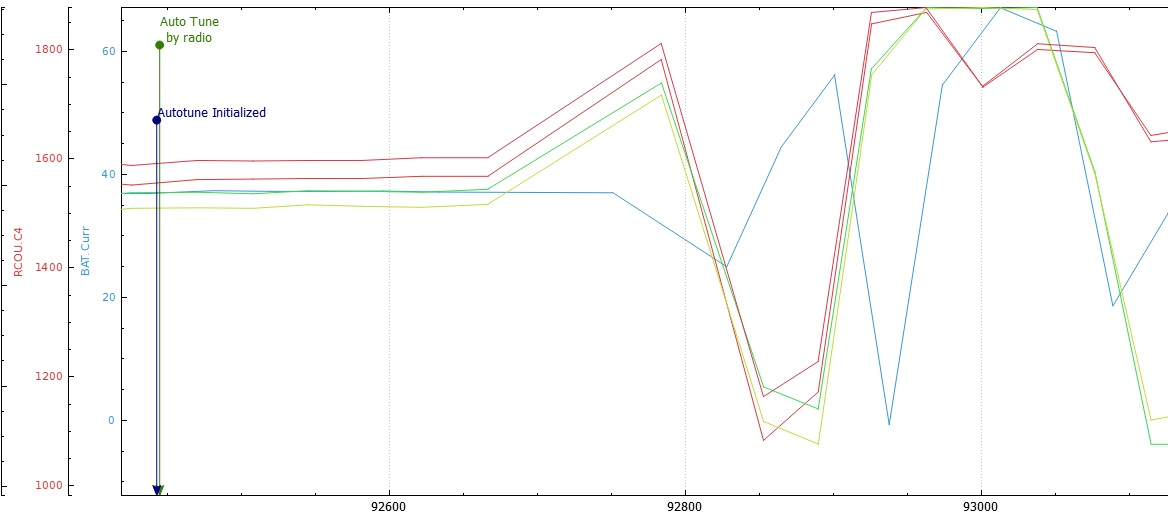
Your first autotune twitch to left looks OK. A nice hike on the right motors (1,4,6,7, pictured) with a corresponding lower demand on the left motors (left out of the graph for clutter) - something akin to asking 33% higher/lower thrust - then the recovery to right isn’t satisfactory, so FC asks for some more power differential between the sides (right motors, pictured, dip more then the left motors not pictured, did at the first twitch) - then FC has to compensate for loss of both attitude and altitude (also left out for clarity) and firewalls all 4 motors…
What should 4 motors asked to deliver their best do ? Suck your LiPo dry ! Then why is the current consumption (pictured, blue line) dropping to zero at the same time that the FC asks half the drivetrain to give its best ?
Two possible reasons. Weak cabling, chinese overrated PDB, bad soldering 'n stuff can be one. Desync could be the other.
Modern ESCs, when desynching, cut all power to the motors and start counting the zero-crossings (stator-rotor alignments) to measure its actual rotational speed and guess when and how to add power to re-start generating thrust. Gone are the days of motors screeching to a stop, signalling a desync. I can’t figure if it helps or it creates more uncertainty.
Kore Carrier Board from Spektreworks (140A continous up to 280A peak)
Cube Black, V.3.6.8
All Esc’s are soldered to this board, correct
We use two 6s Batteries in serial, connected to the “Kore Carrier Board”
ESC: We are using the Flame 60A HV from “T Motors”.
The connections between motors and ESC’s are not soldered, this connection are crimped.
i don’t think that the Kore Carrier Board is a problem. The highest current I saw was 67Amps, so we are more than in range of the board. Could it also be an heating problem of the ESC’s and a shutdown from their overheating protection?
What do you think? What is the most likely reason for the crash?
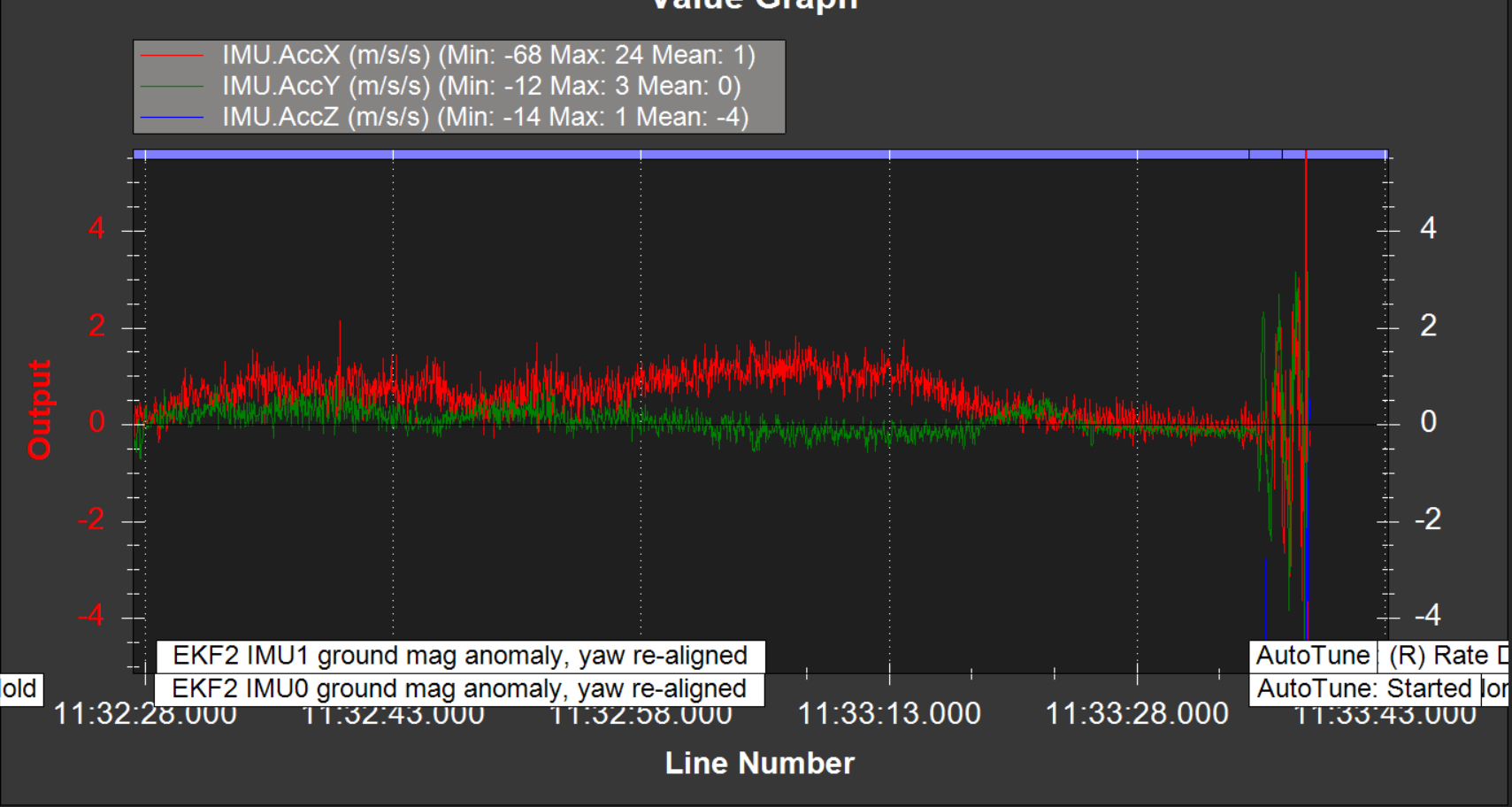
Vibrations looks totally fine for my understanding before AutoTune but I didn’t understand why X and Y drifting apart and comes back?
We have had all kind of desync probs with P80III motors and Alpha Esc. Changing now over to Hobbywing X8 system. Hopefully it’ll work better, will let you know.
At the moment we have had only problems with T-motor Esc + T-motor motors on large builds.
I must say our is a quadcopter spinning 28" props.
We have had about same situation, was flying “good” until started autotune than it crashed, it was on old Flame 80HV esc. So we changed over to Alpha FOC esc and it got a bit better and we carried out successfully an autotune but than testing it in stabilized it desynced again and crashed.
We had the same issue with the older Flame ESCs.
We did not even bother with the Alpha series, instead installed “regular” BL-Heli ESCs with very good results.
Mail from T-Motors:
" Let me explain. As you can see from the list on our website, that ALPHA60ALV matches many motor types. However, the difference lies in the firmware.
When it comes to different motors, the firmware will be different.
For example, if the ALPHA60ALV you have is with firmware for MN601-S KV320, then it cannot be used with MN505-S KV320. And you will need a DATA LINK to reprogram it to make it fit MN505-S KV320."
If you want to go “industrial” then try that open-source ESC everyone uses on electric longboards, bikes and whatnot. The VESC.
I don’t know if anyone tried it on a multicopter, but by all means it’s a serious piece of hardware, and maybe the developer, Benjamin, may chime in if presented with the challenge.
The only other “industrial” ESC I’ve seen is an evaluation board from ST (the company that develops the STM32 class of microcontrollers, amongst other things) called STEVAL-ESC002V1 sporting a new built-for-purpose chip, with some interesting features, like integrated op-amps on the BEMF-measuring inputs, but sadly it’s only a 2-6S implementation.
Really don’t know what to tell you. Based on my experience, when we were using the Flame esc it would desync on the first autotune twitch.
We moved to Alpha and it got better since we were able to complete an autotune but the desync problem showed up again.
We are now moving to Hobbywing X8 system, hoping it’ll work with no prob.
I going out on a limb here but why Auto tune at all I have fantastic results using the stock PID’s on my 18" prop builds quads and 10" x-8 builds. The quick answer to your issues in my opinion is to delete the config file recalibrate and fly the x8 stock and if you have any issues manually tune in the axis you think needs help. Regarding esc’s get yourself some good Dshots 32 bit 50 amp or higher like Hollybro’s. As a side note I not a big fan of the smaller t-motors.