Hello you log file geniuses. I’m not well versed in analyzing logs yet and could use some assistance in trying to figure out what caused a fairly gnarly crash this morning.
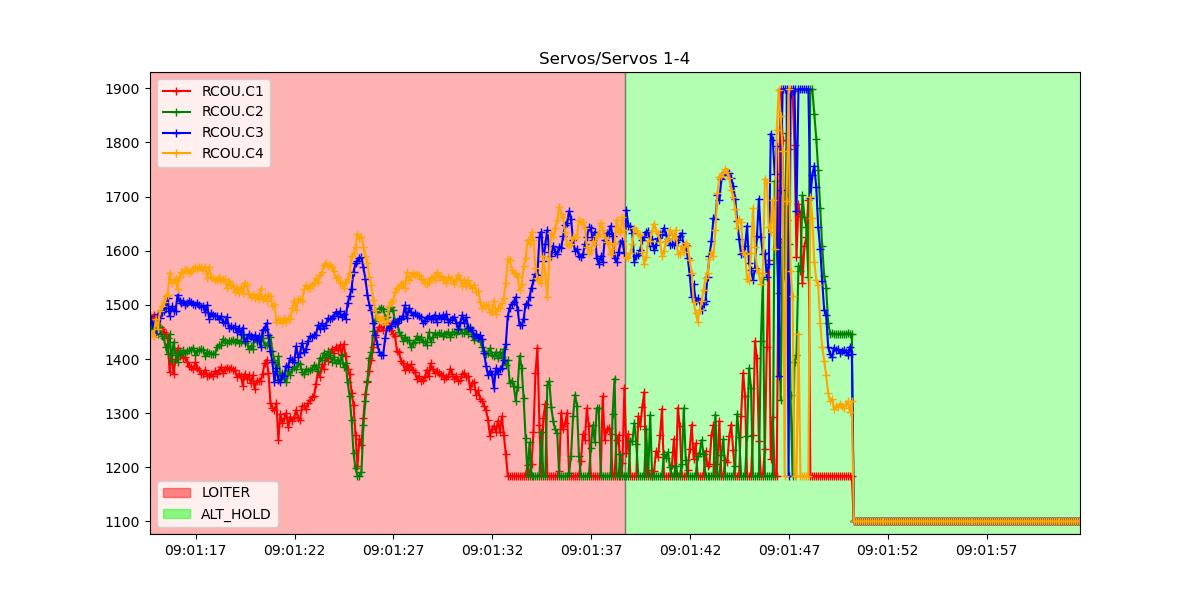
I started the tuning process and about 2 minutes into the flight, the copter started continuously yawing clockwise pretty fast and I had no choice but to put her in the dirt. The arms and motor mounts were tight as far as I could tell so I don’t think that was the issue. One of the motor arms is now twisted quite a bit but that seems likely from where the majority of ground impact happened (it’s also snapped in half.)
The uncontrolled yaw did happen yesterday briefly in RTH and was able to recover in stabilized or loiter mode (can’t remember which) and the copter flew just fine after that. Today was a completely different story.
https://drive.google.com/file/d/1qePmURZmhzbtFjutFHr-fsRrm_5rnkPZ/view?usp=sharing