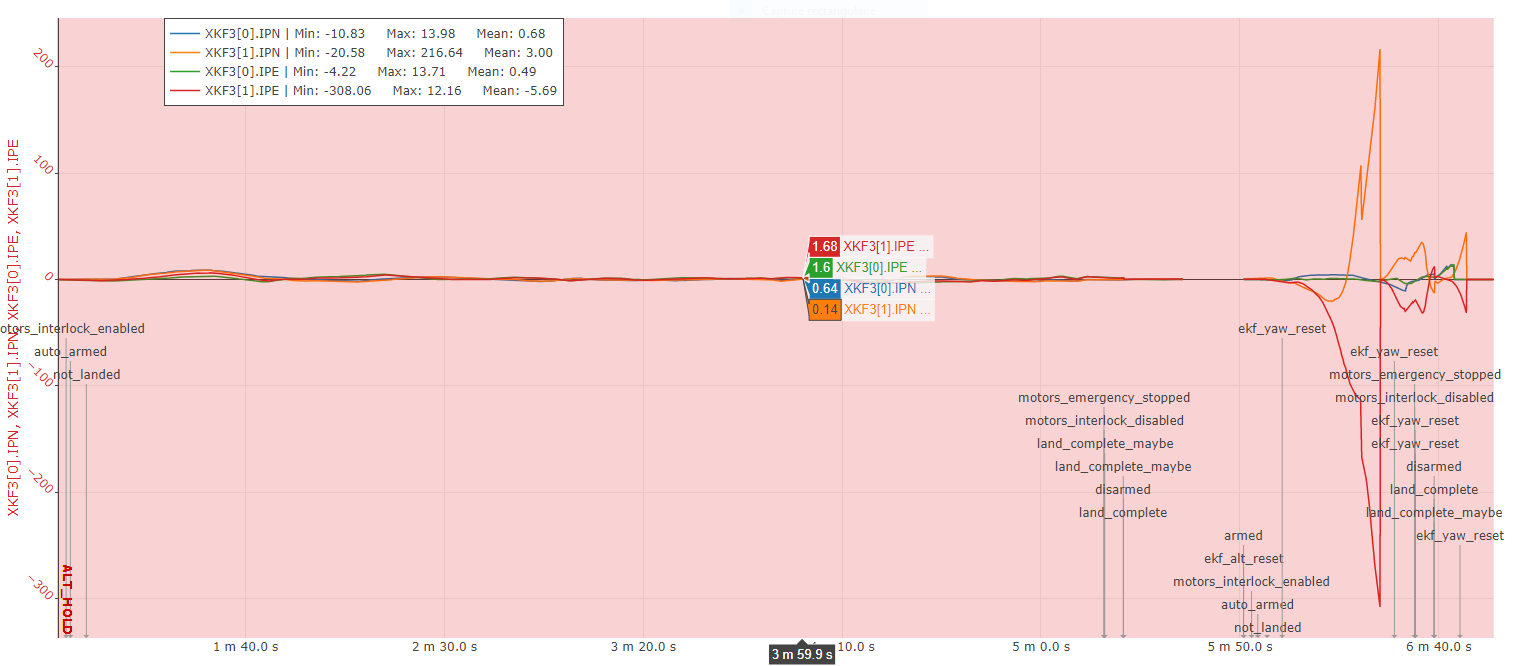
Thanks for your help @xfacta. There is something strange also look here before the crash this is Position Innovation NE and before the crash curves are crazy
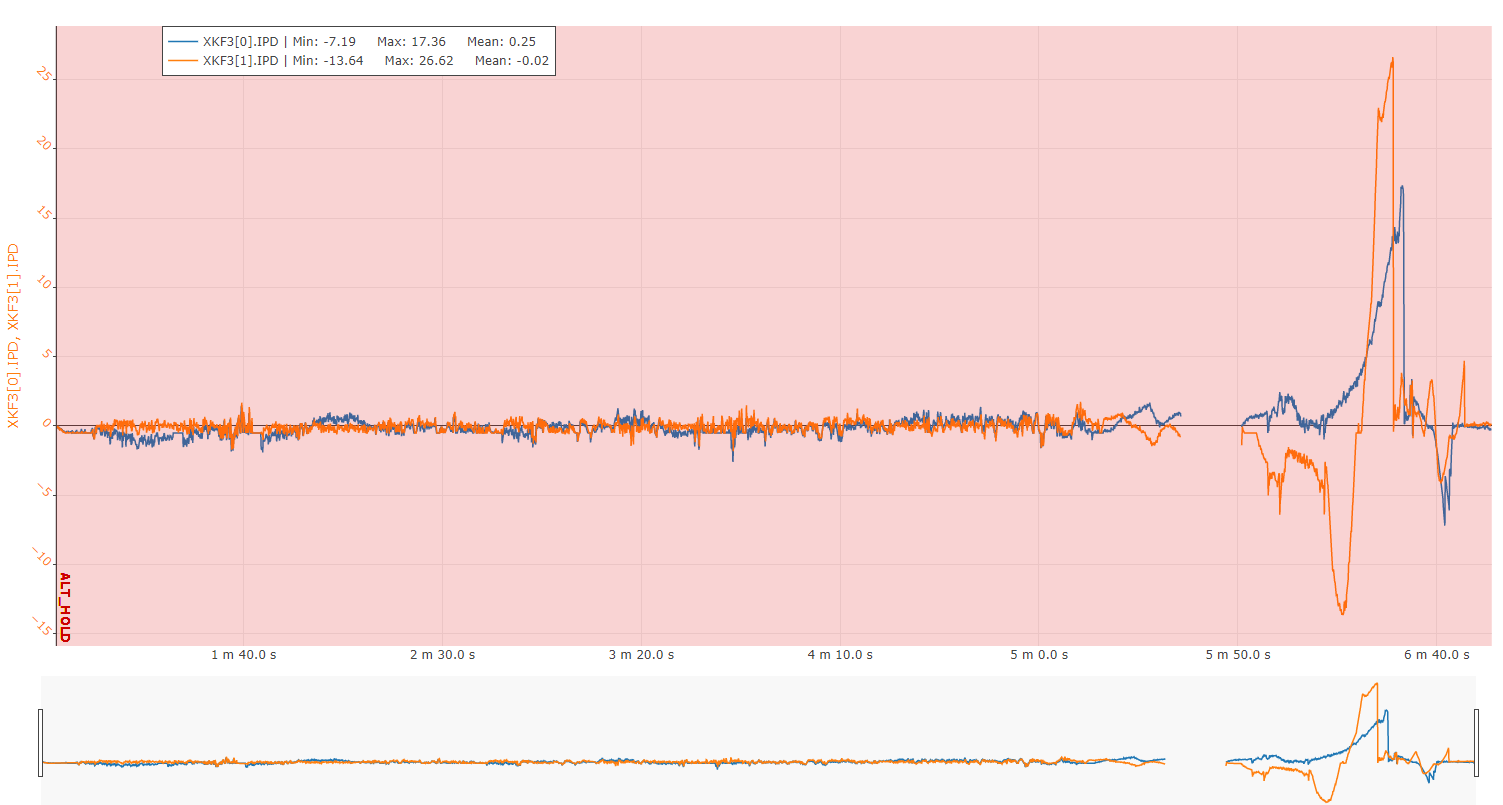
Same for Position Innovation Down
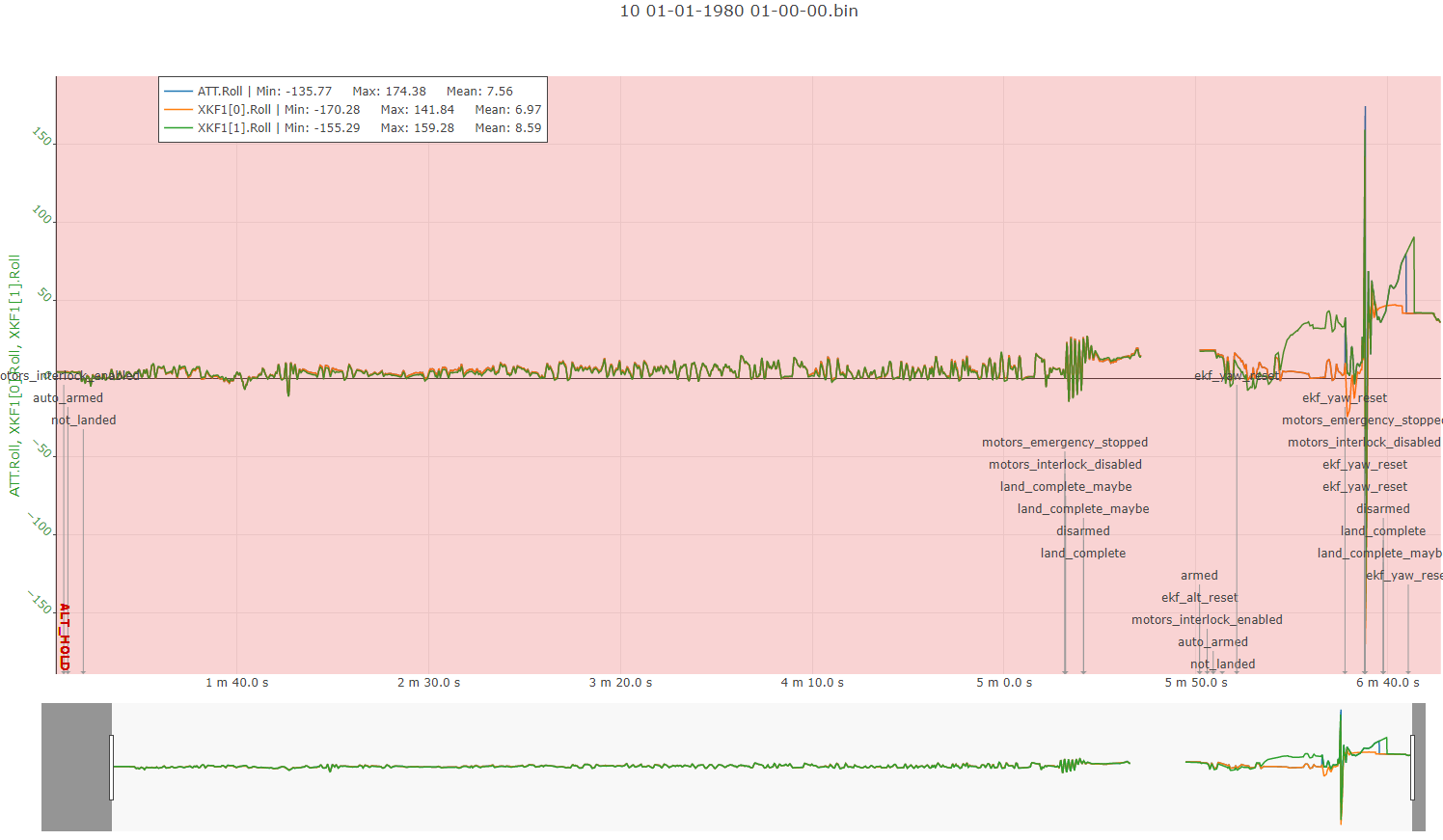
Same for Euler roll and pitch
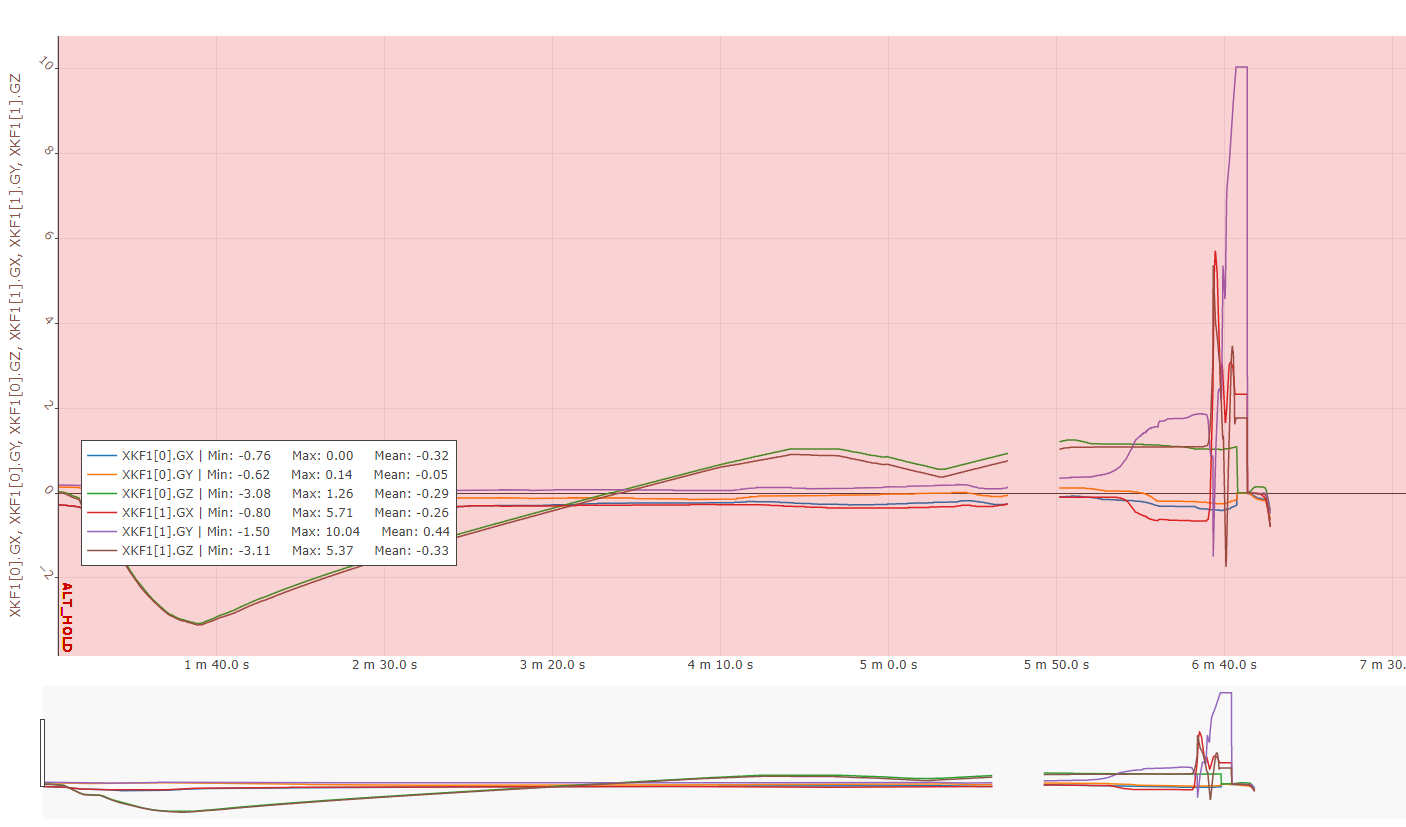
Gyro bias also
Curves go crazy just after take off, and I found this thread here is it possible that was EKF3 bug? Just before crash I got an EKF3 lane switch 1 directly follo by an EKF PRIMARY CHANGED:1 and just after crashed
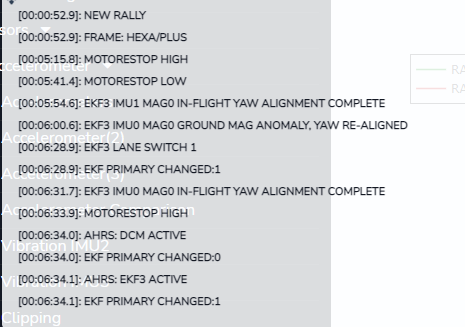
Something else strange I have EKF_YAW_RESET before crash maybe this is due to mag error? I fly in indoor environement. I use extrernal captor for baro an BMP388 and for mag an GY271 all are connected in i2c