Hi all,
I sufffered a crash this afternoon with my copter in AltHold, it was really strange suddenly my copter take altitude and I no longer had control over the throttle, my throttle stick was a minimum. I’ve looked the log and I found strange two things.
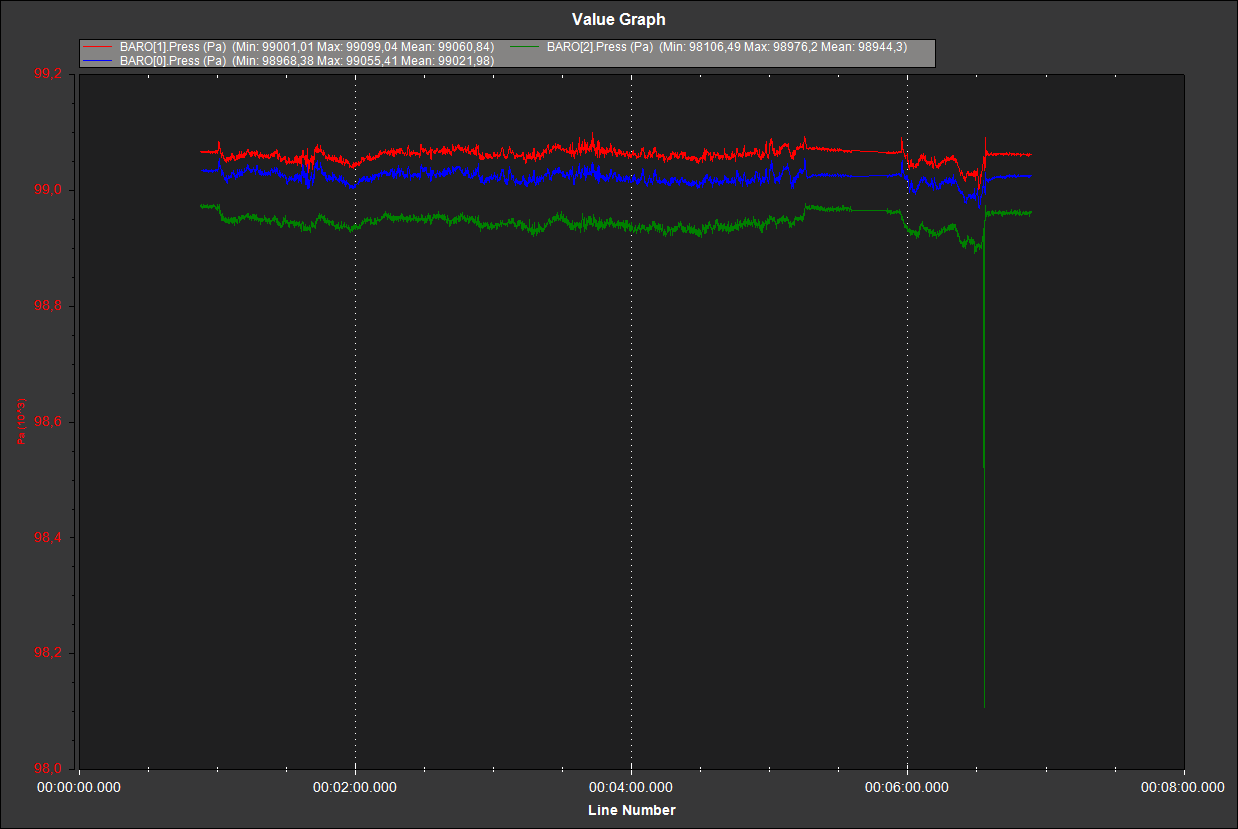
First one the baro pressure I loss a lot pressure on one baro
I could not see any other reason, only the Baro you found.
It might be an intermittent connection problem, or faulty baro.
I’m unsure why you have three, but maybe changing the order will help.
BUT
I would seriously add a GPS unit, EKF knows how to fuse all the sensor measurements and come up with a good estimate of actual position and altitude and so on…
If you are just planing on doing indoor flight then get a rangefinder.
Barometers can be a bit noisy and unreliable on multirotors due to all that propwash and vibrations.
If you do add a GPS then update ARMING_CHECK,161278
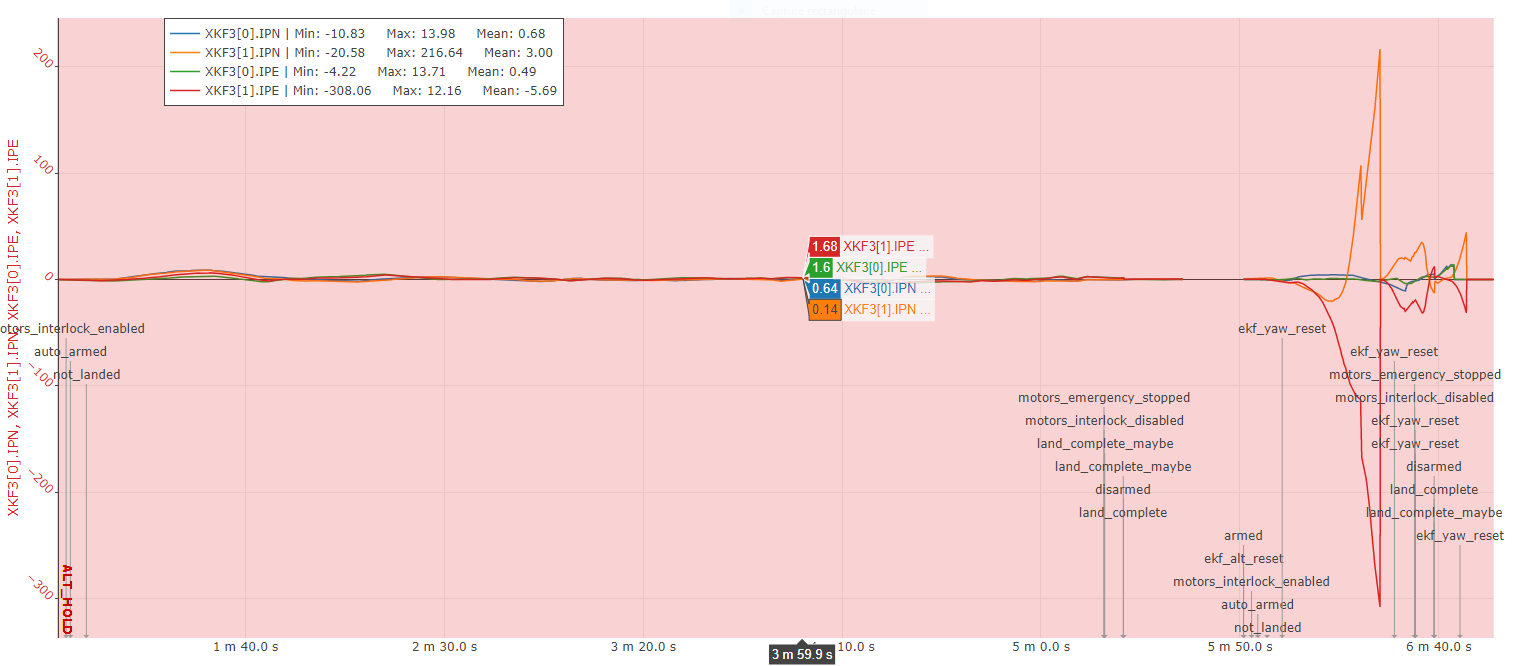
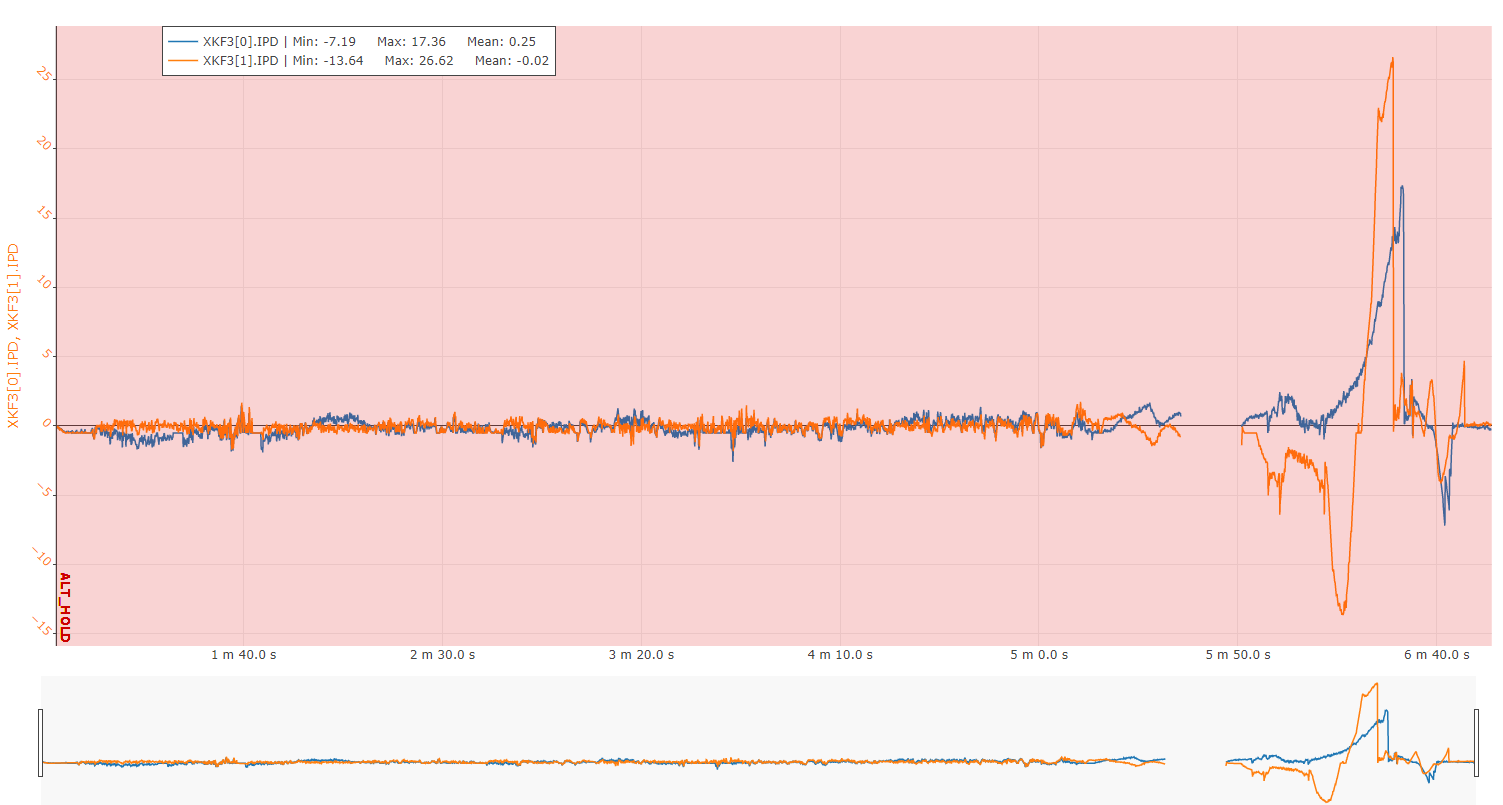
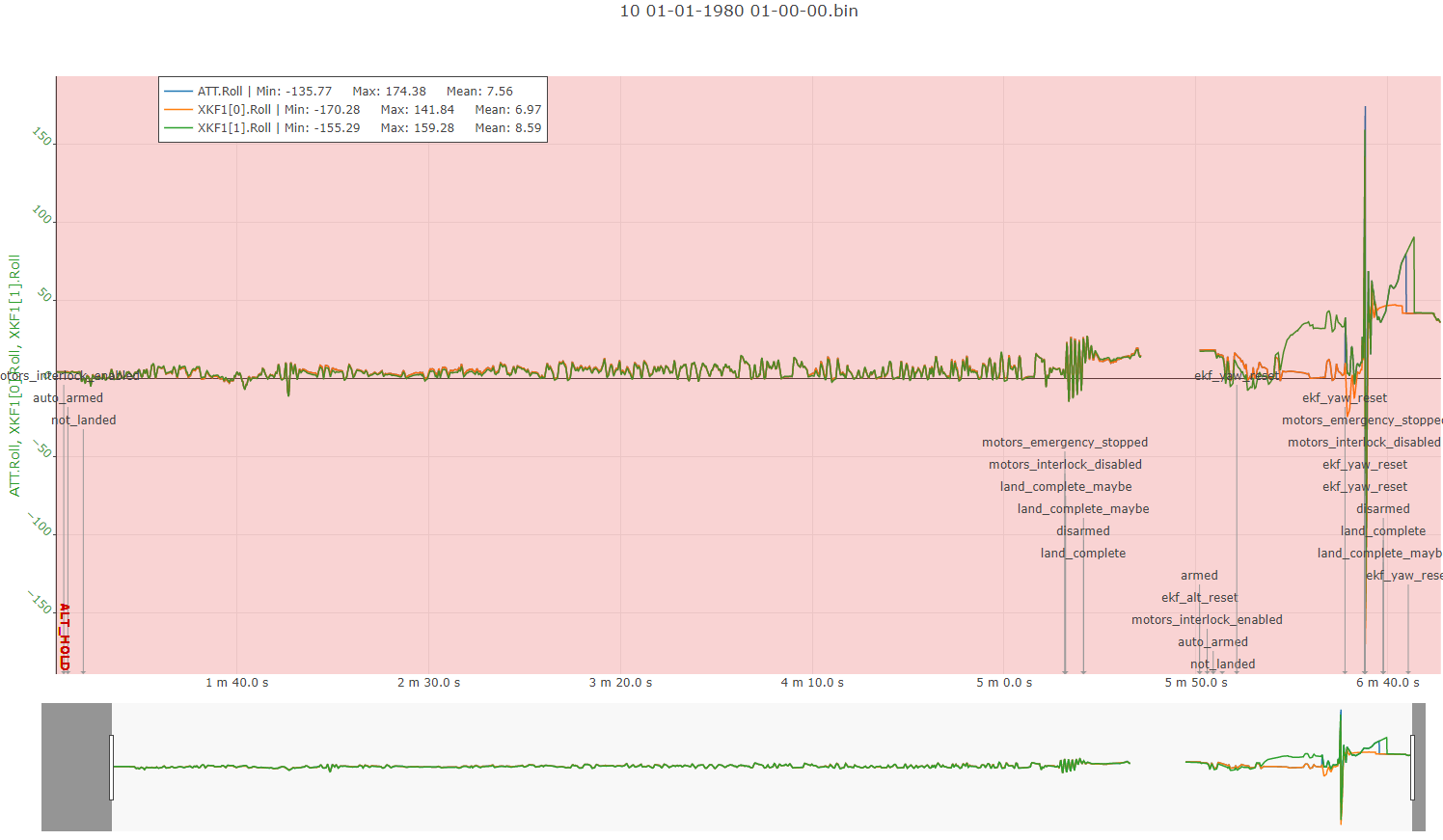
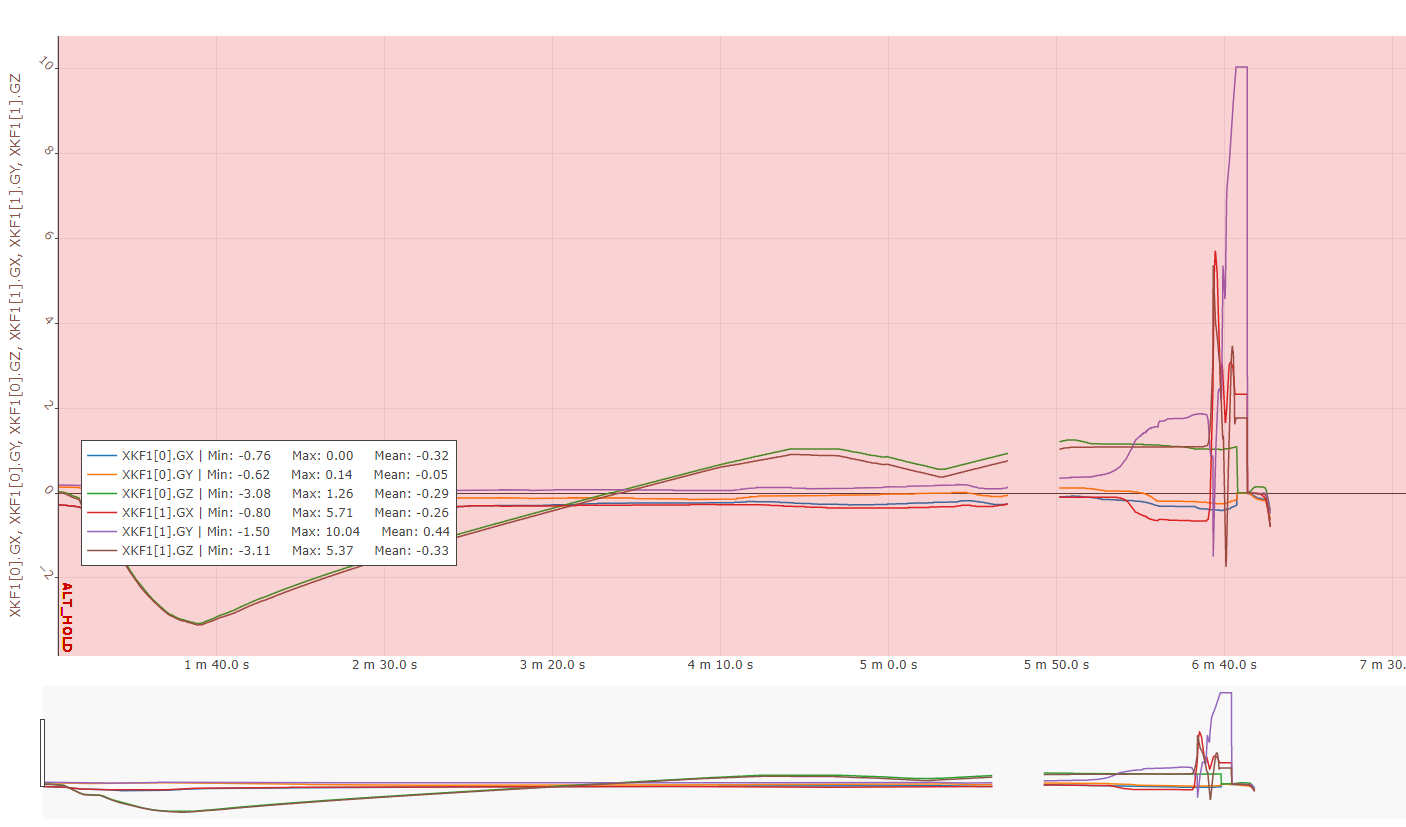
Thanks for your help @xfacta. There is something strange also look here before the crash this is Position Innovation NE and before the crash curves are crazy
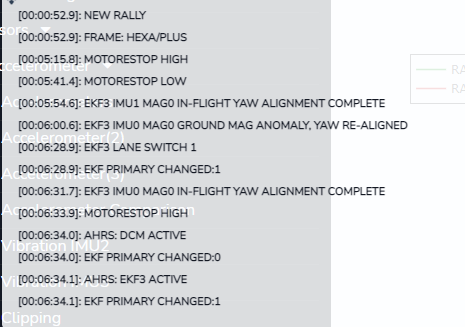
Curves go crazy just after take off, and I found this thread here is it possible that was EKF3 bug? Just before crash I got an EKF3 lane switch 1 directly follo by an EKF PRIMARY CHANGED:1 and just after crashed
Something else strange I have EKF_YAW_RESET before crash maybe this is due to mag error? I fly in indoor environement. I use extrernal captor for baro an BMP388 and for mag an GY271 all are connected in i2c