First up I see you’re on ArduCopter V3.6.7 with Cube black.
SB02 mandates minimum 3.6.11 with these parameters:
EK2_IMU_MASK,7 <- you have this at 3
INS_USE,1
INS_USE2,1
INS_USE3,1 <- you have this at 0
Please also ensure Mission Planner is updated, as it will alert you to a Cube hardware issue if it exists in your Cube.
Seriously I’d recommend upgrading to 4.0.2, there’s a motor desyncing fix that will help with larger props, although I cant remember if 3.6.7 was affected.
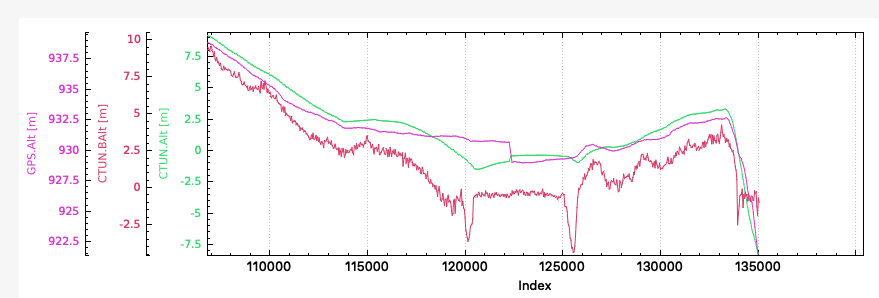
Looking at the log, it just seemed to get out of control and not able to stabilize itself, possibly due to being a bit over-weight or underpowered - average PWM is a little bit on the high side but not the worst we’ve ever seen. The correct settings in MOT_BAT_VOLT_MAX and MOT_BAT_VOLT_MIN could help. Also try these lower PIDs to begin with:
ATC_RAT_RLL_P,0.12
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_D,0.005
ATC_RAT_PIT_P,0.10
ATC_RAT_PIT_I,0.10
ATC_RAT_PIT_D,0.004
If you’re staying with a AC 3.6 version, start with these parameters then run an Autotune, assuming 6 cells and 16inch props:
ACRO_YAW_P,2.40
ATC_ACCEL_P_MAX,70300.00
ATC_ACCEL_R_MAX,70300.00
ATC_ACCEL_Y_MAX,21600.00
ATC_RAT_PIT_FILT,14.00
ATC_RAT_RLL_FILT,14.00
ATC_RAT_YAW_FILT,2.00
ATC_THR_MIX_MAN,0.10
AUTOTUNE_AGGR,0.05
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_LOW_VOLT,21.60
INS_ACCEL_FILTER,20.00
INS_ACCEL_FILTER,20.00
INS_GYRO_FILTER,28.00
INS_GYRO_FILTER,28.00
MOT_BAT_VOLT_MAX,25.20
MOT_BAT_VOLT_MIN,19.80
MOT_THST_EXPO,0.71
MOT_THST_HOVER,0.20
Initial Parameters if you want to upgrade to 4.0.2 first:
ACRO_YAW_P,2.40
ATC_ACCEL_P_MAX,70300
ATC_ACCEL_R_MAX,70300
ATC_ACCEL_Y_MAX,21600
ATC_RAT_PIT_FILTD,14.00
ATC_RAT_PIT_FILTE,0.00
ATC_RAT_PIT_FILTT,14.00
ATC_RAT_RLL_FILTD,14.00
ATC_RAT_RLL_FILTE,0.00
ATC_RAT_RLL_FILTT,14.00
ATC_RAT_YAW_FILTD,0.00
ATC_RAT_YAW_FILTE,2.00
ATC_RAT_YAW_FILTT,14.00
ATC_THR_MIX_MAN,0.10
AUTOTUNE_AGGR,0.05
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_LOW_VOLT,21.60
INS_ACCEL_FILTER,20.00
INS_GYRO_FILTER,28.00
MOT_BAT_CURR_MAX,50.00
MOT_BAT_VOLT_MAX,25.20
MOT_BAT_VOLT_MIN,19.80
MOT_THST_EXPO,0.71
MOT_THST_HOVER,0.20
You can copy and paste these straight into an ordinary text file (notepad) and Save As with a .param file extension and then apply them using mission planner. This saves trying to find all the parameters and individually type in new values, and possibly making mistakes.