I have a Tarot 650 Sport Quadcopter UAV. The UAV is equipped with a Hex Cube Black flight controller, RFD868 modules. Here are telemetry Logs link: Logs - Google Drive
The drone took off to 0.5 meter approximately and suddenly tilts toward right and crashed. Kindly help me figuring out the issue. I am new to Pixhawk
The pixhawak did not creat the .bin log of that flight. Had a logging error notifcation during crash flight.
After the flight i did some testing by taking off the props. Here is its .bin log file:
Nothing to be learned from this log. Looks to me and as @Allister said you are on default parameters and this shouldn’t even be leaving the ground. Start over.
If you have checked the frame xy-cg, propeller spin direction, and follow the tuning guide from section 1, you should be able to quickly switch to Alt-hold and let the Ardupilot further learn a propulsion value for your 14" propeller Hexa drone and continue the tuning.
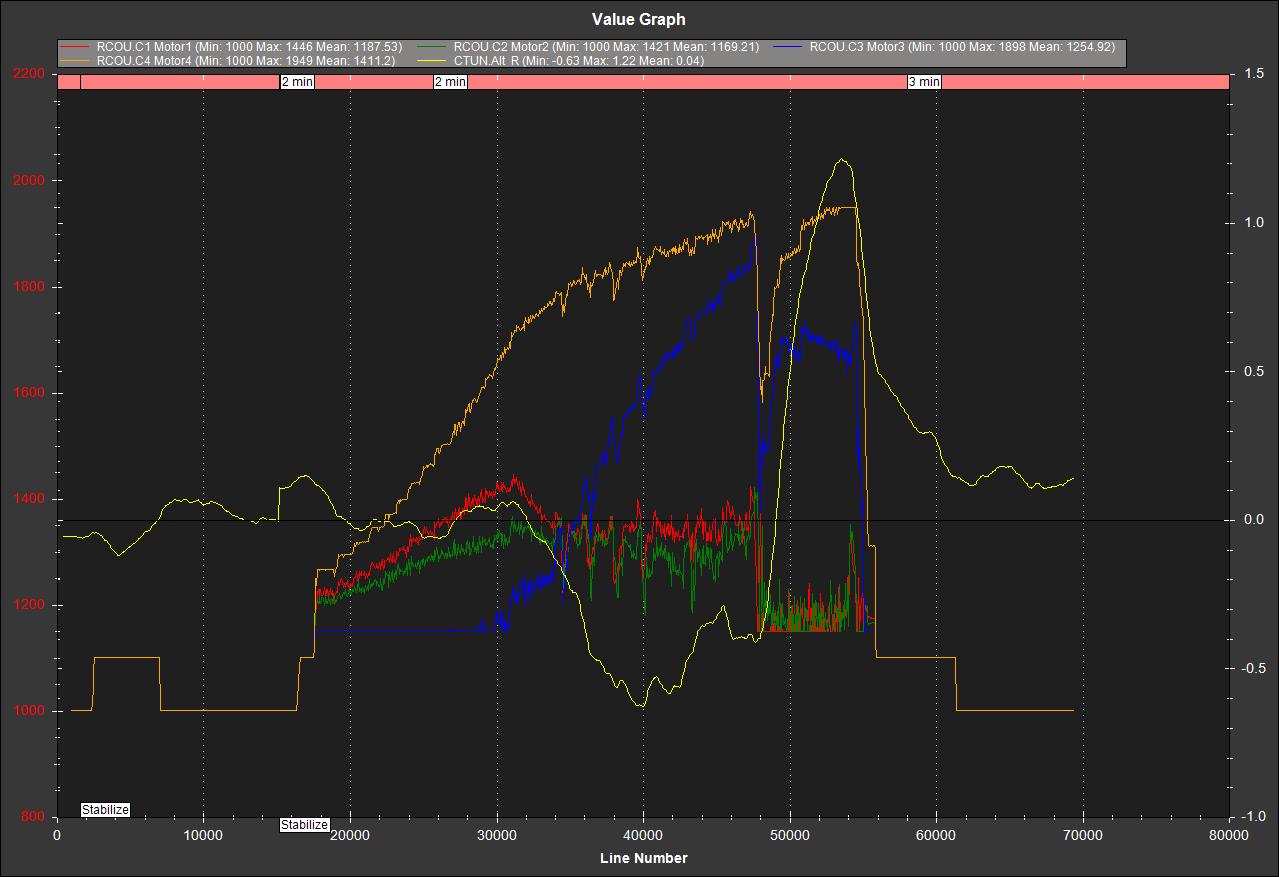
Hy! i did some testing and here are the logs of today test. Today the drone was tilting toward once driection when i increased the throttle. Kindly go throught the logs and help me in figuring out what’s wrong with the drone.
PILOT_SPEED_UP,125, reduced it for now.
PILOT_ACCEL_Z,75, reduce for now
LOG_FILE_DSRMROT,1
By the way, what flight controller hardware board are you using? if you are still with CubeBlack, I do not recommend running 4.3.8 and above with the default build.
Yes i am using cube black, which build you suggest to use with cube black?
I have done ESC calibration and i have also done motor test multiple times. Battery voltage is correct. Yes i also motor output is also wired, when i increase throtle which causes the drone to tilts toward one direction.
If you have done ESC calibration, frame XY CG check, RC calibration, and motor direction test, probably your motor or ESC is not working properly or you have accidentally configured the ESC to some unknown configurations, for example.
I am using High Voltage LiPo (Lithium Polymer) LiHV. It’s similar to LiPo battery but allows you to charge it up to 4.35V per cell safely, and regular lipo could be charged up to 4.2v only.
I did the flight again and switched to the older firmware as you recommended. I initially tried to takeoff in stabilized mode and had the same issue: the cockpit was tilting toward the left. So I aborted the takeoff.
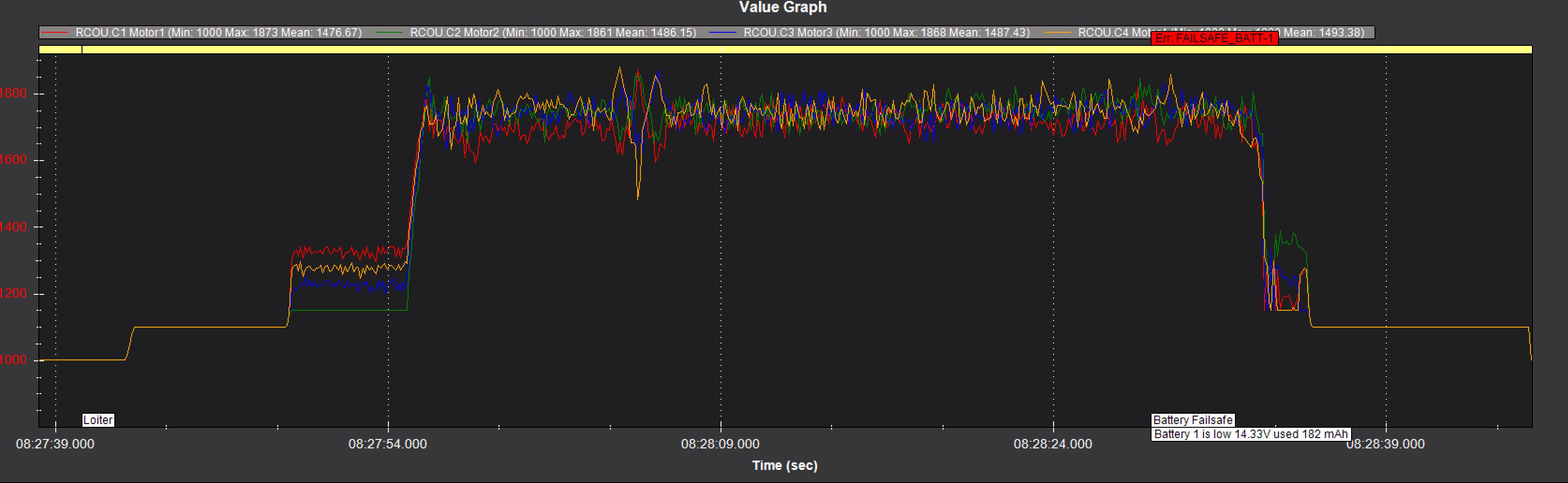
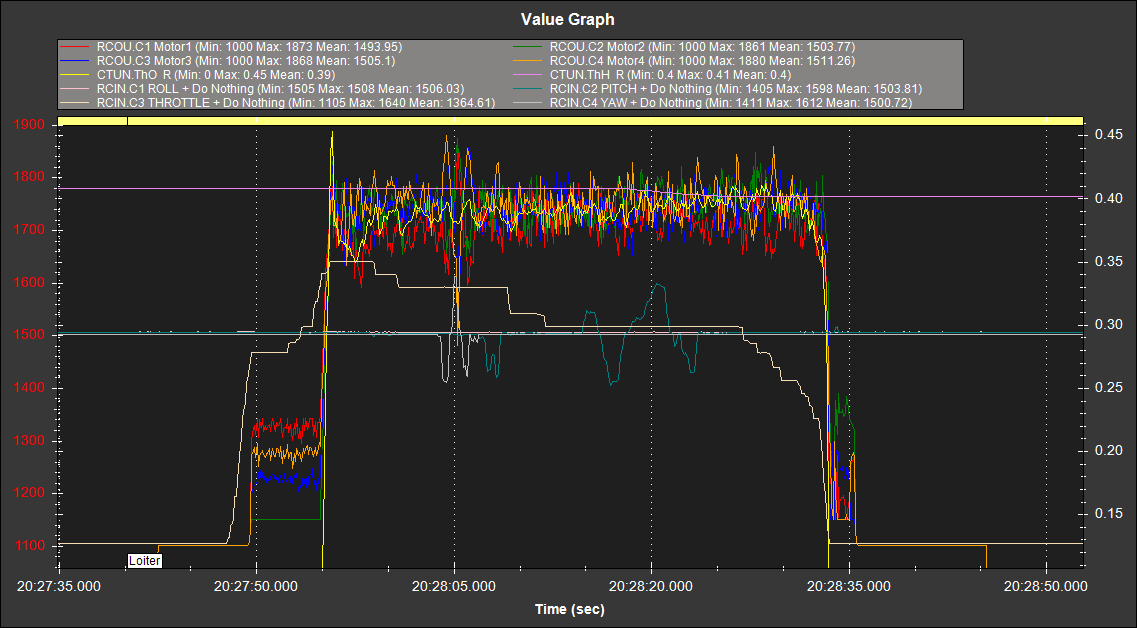
After that, I tried to fly the drone in loiter mode, and with the same setup and without any changes, the drone was able to take off in loiter mode.
It’s a bit strenuous, as the mission planner recommends doing the flight in stabilized mode.
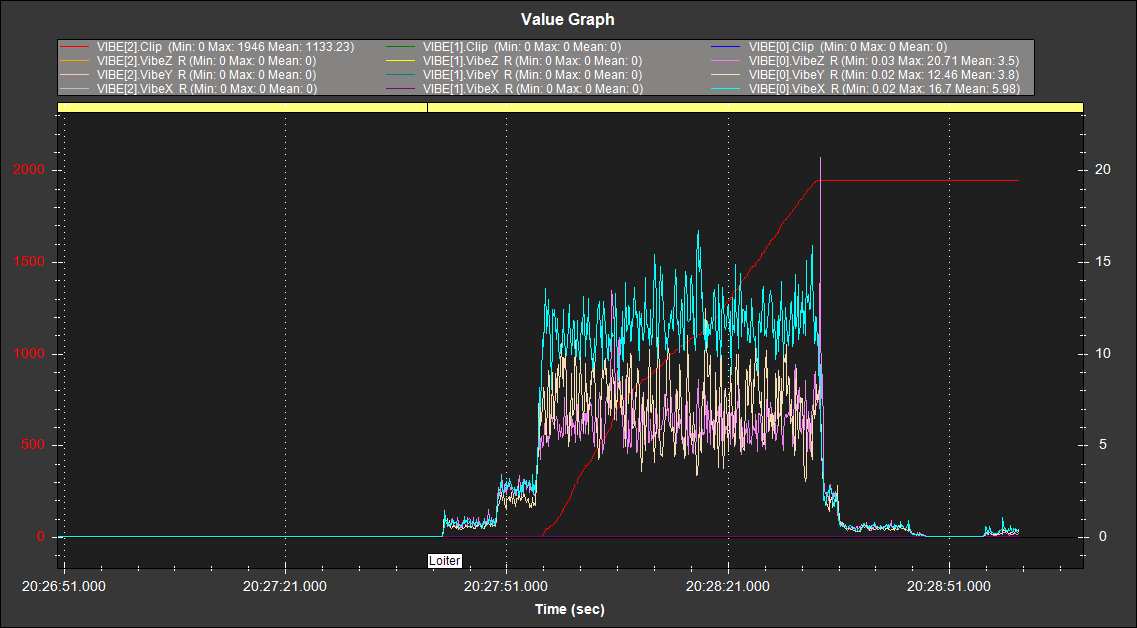
As @dkemxr said, your drone motor and propeller combination thrust may not be sufficient for the entire drone. Usually, MOT_THST_HOVER will be 0.25 and below. besides that, the graph looks normal expected. CubeBlack, there may be a wrong configuration as a result of logged high vibration.