Hello, this is David Solano, a drone enthusiast an entrepreneur, and this is my first post in the forums. You guys are an amazing community, and in many of these posts I have learned many things.
So, the reason for my post is the following:
One of my drones that was behaving normally for 80+ auto missions (not including training flights) had an issue mid-way through the mission, during one of the straight passes:
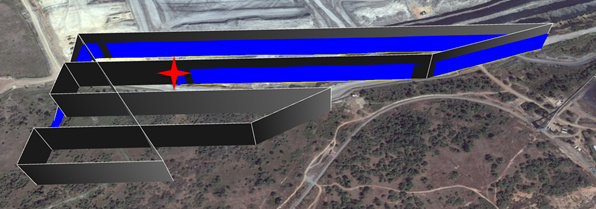
At that point, the drone started to lose altitude, and suddenly started to spin uncontrollably, until it came down and crashed (at a relatively slow speed of 4 m/s from 120m). From there, I formulated the following hypotheses:
• Magnetometer issue in flight (stopped being reliable)
• Engine issue in flight (torque disbalance can explain the spin)
• EKF variance increasing uncontrollably (reduction in confidence in different measurements given to the controller).
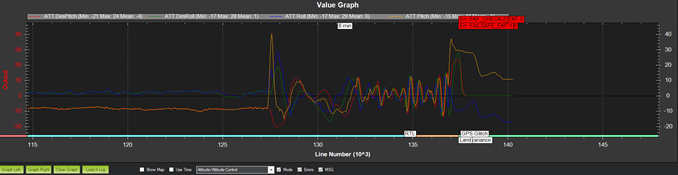
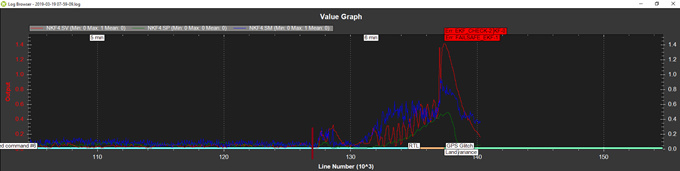
After reviewing the log stored inside the drone, one of the information that caught my attention was the fact that, at the time of the glitch/failure (at about 127 seconds from the start of the mission) the commanded roll/pitch attitudes starting varying quite strongly with respect to the actual attitudes, as shown in the following graph:
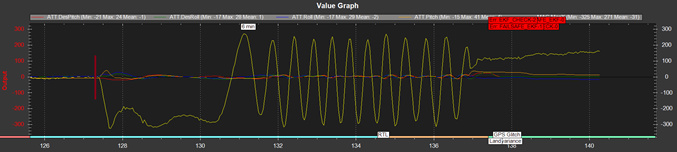
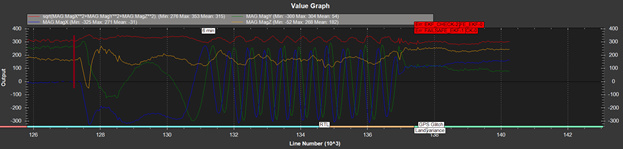
At the same time, during the event, there is a considerable change in magnetic field in the X direction (yellow), starting to suddenly oscillate (and thus giving evidence of the actual spin):
Then, I decided to see the different speed/position/magnetic variances estimated by the EKF during the incited, and although the different quantities do start to diverge, they do so after the divergence episode has happened (at 130+ seconds), after which they start to increase as the drone spun uncontrollably:
Thus, I suspected an engine issue, but all throughout the episode the current (yellow) and voltages (flat orange line at 22 V) stay roughly constant, not showing sudden drops of power or voltage during the uncontrollable episode.
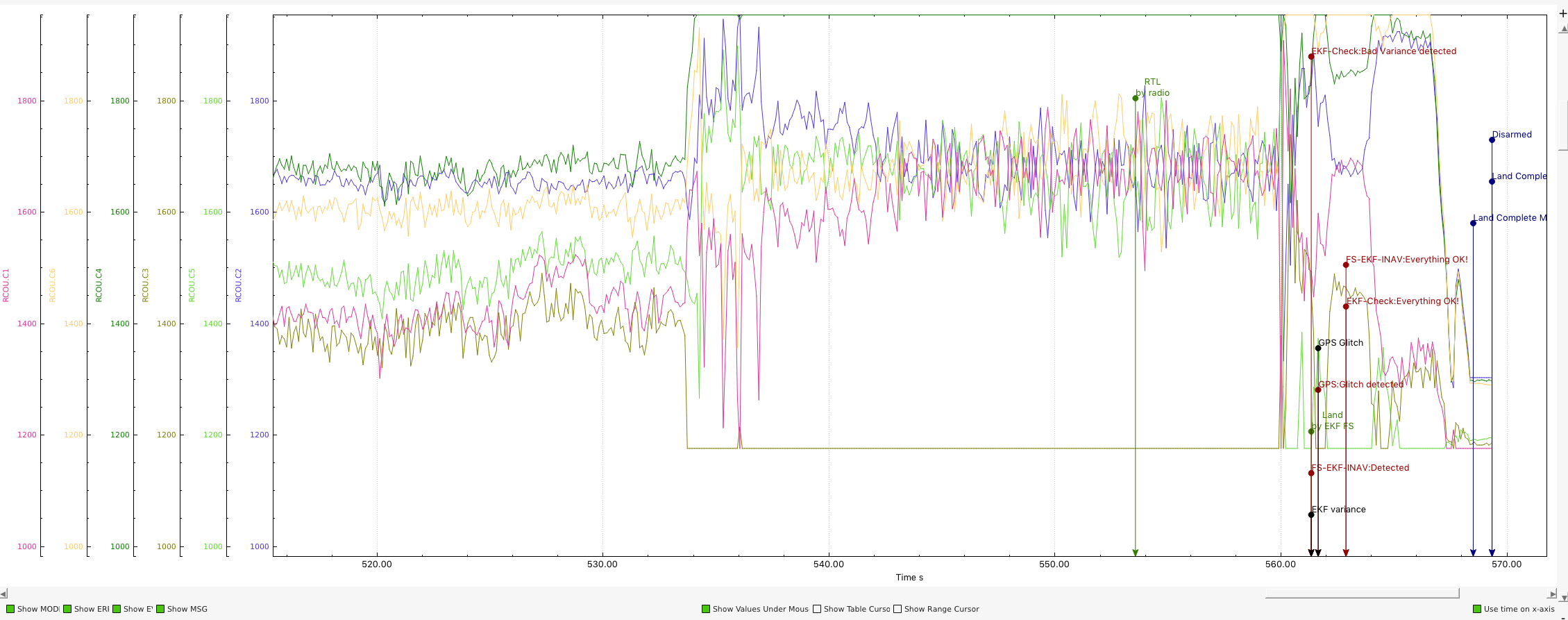
Thus, I am still puzzled about the cause of the incident, as I can’t pinpoint any hardware as the direct responsible for the accident. However, the magnetometer readings did show something strange, as they ALL start dropping at that same mark:
Could it be a magnetometer issue, and if it were, why the EKF did not just started distrusting the compass and increased the compass variance in a convincing manner?
Will a bad engine show up in any of the log readings (such as current or voltage)? Is there any way to diagnose?
Thank you for your time and I really appreciate any clarification or assistance in this case. I also upload the log in case of a more thorough review, link:
https://drive.google.com/open?id=1gHr1b3vmglcoI39NZnyhbrTFaWsePJYx